基于人车耦合的安全过街控制方法与流程
1.本发明涉及交通控制技术领域,特别涉及基于人车耦合的安全过街控制方法。
背景技术:
2.行人过街是城市道路管理中重要的组成部分,良好的行人过街控制,能够有效提高行人过街的通行安全,促进行人过街的通行效率,合理引导行人过街。
3.然而,现有过街信号灯还未能考虑到残障人士以及老年等特殊人群过街,部分存在视距盲区交叉口严重影响行人过街安全,独立的行人信号配时方案依然不能保证行人过街的安全。
4.在实际应用中,行人过街控制系统一般仅仅利用行人信号灯进行控制与显示,当前行人信号灯由不同颜色led灯组成进而进行行人管控,行人通行相位大多与机动车直行相位相匹配。
5.一方面,大多交叉口行人信号灯与交叉口管控设备相对独立,不同交叉口结构的复杂性与路侧多设备多系统造成交叉口行人管控的复杂性;
6.另一方面,行人信号灯功能的单一性,仅依靠行人信号灯未能对特殊人群提供安全有效的过街保障。
7.因此,如何解决现有技术行人过街控制系统相对独立的弊病,实现了行人步速进行分类,提高特殊行人的检测准确性,实现行人过街控制和交叉口控制联动成为本领域技术人员急需解决的技术问题。
技术实现要素:
8.有鉴于现有技术的上述缺陷,本发明提供基于人车耦合的安全过街控制方法,实现的目的是解决了传统行人过街控制系统相对独立的弊病,实现了行人步速进行分类,提高特殊行人的检测准确性,有利制定更加适宜特殊人群通行的行人信号控制方案,为特殊行人过街提供便利,实现了行人过街控制和交叉口控制联动,使得城市道路交通的管理与控制更加均衡合理,能够进一步提高道路交通运行效率。
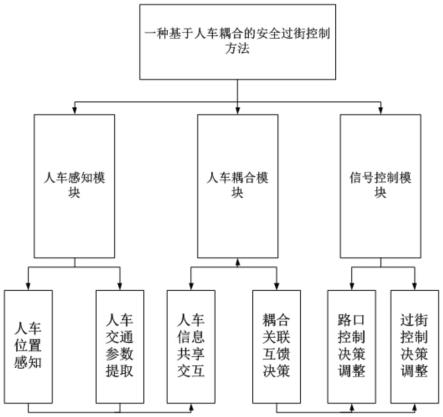
9.为实现上述目的,本发明公开了基于人车耦合的安全过街控制方法;通过人车感知模块感知行人与交叉口过往车辆速度方位特征,通过人车耦合模块进行信息交互,实现人车信息共享与提示,通过信息控制模块互馈式信息模块处理方式,实现行人安全过街信号控制与预警;
10.所述人车感知模块结合路侧感应装置与雷达测速装置用于在过街路段中对过街的所述行人进行信息收集,提取所述行人过街速度并对过街的所述行人进行状态研判,获取车辆驶入信息;
11.所述人车耦合模块用于判断过街的所述行人中是否存在残障人士、老年人或者儿童的信息,人车信息双向提示,采用回馈式信息机制通过路侧装置将所述行人的信息传输给车辆的车载终端,同时车辆信息被路侧装置所接受反馈给所述人车感知信息模块;
12.所述信号控制模块利用获取人车信息进行交叉口相位时间与行人信号控制策略调整,将控制调整后传输给显示器策略实施;
13.所述信号控制模块包括行人信号控制器与交叉口信号控制器;
14.所述路侧感应装置与所述雷达测速装置通过专用信道进行信息交互处理,信息反馈至路口信号机进行对应过街的交叉口与行人信号相位、绿灯时长、信号周期时长策略调整,并将交叉口区分为不需要二次过街十字交叉口与需要二次过街十字交叉口。
15.优选的,所述雷达测速装置设置在行人信号灯上,将扫描区域投射到所述行人的过街区域,用于将所述行人速度信息转变成多普勒频率信息进行输出,降噪后筛选处理出所述行人的步行速度,再根据所述行人的步行速度进行分类;
16.所述路侧感应装置包括分别设在交叉口四个行人斑马线进出口位置,能够通过车载obu进行lte-v通信;
17.所述车载终端支持lte-v信息采集和存储,采集包括交叉口车辆产生的速度、转向实时信息。
18.更优选的,所述人车耦合模块有人车信息交互实施;
19.所述路侧感应装置接入车辆的所述车载obu信息,进行车辆的信息发送与获取行人信息;
20.所述行人通过信号灯上加装的声音灯光装置进行过街提示。
21.更优选的,所述信号控制模块包括行人信号控制器与交叉口控制器;
22.所述路侧感应装置与所述雷达测速装置通过专用信道进行信息交互处理,决策信息反馈至所述信号控制模块,通过所述信号控制模块进行对应过街的交叉口与行人信号相位、绿灯时长和信号周期时长策略的调整。
23.更优选的,所述人车感知模块的工作流程具体如下:
24.步骤a1、结合每一交叉口过街道路不同形式,设置在所述交叉口的每一所述路侧感应装置分别安置行人过街四个方向;
25.行人信号灯上设置的所述雷达测速装置的水平夹角为θ;
26.所述雷达测速装置的安装高度为h,扫描区域覆盖相应的所述行人的过街区域,距离所述扫描区域的最近距离为d;
27.所述行人的过街区域的单侧的长度为zh_l;
28.步骤a2、校验所述雷达测速装置,满足以下关系:
[0029][0030]
步骤a3、计算所述雷达测速装置对应的所述行人的过街区域的参数,以及所述行人的步行速度,具体如下:
[0031]
fa=δf-fd;
[0032]
fb=δf+fa;
[0033][0034]
其中,δf为所述雷达测速装置检测行人发射信号与反射信号的频率差;fd为所述雷达测速装置与所述行人相对运动的多普勒频移;fa为前半周期正向调频的差频;fb为后半
周期负向调频的差频;f0为所述雷达测速装置发射波中心频率;c为光速;v为行人速度;所有数值取正负中规定,靠近所述路侧感应装置的所述行人的所有数值为正,远离所述路侧感应装置的所述行人的所有数值为负;
[0035]
步骤a4、车辆信息的感知,即通过所述路侧感应装置获取接入车辆的所述车载obu信息;
[0036]
所述车辆通过车载obu持续上传车辆位置及运动信息至所述路侧感应装置;
[0037]
所述路侧感应装置接收记录车辆的速度转向信息;
[0038]
步骤a5、所述路侧感应装置获取信息进行分析,选出存在转向车辆的信息,将车辆信息与过街行人的速度信息传入所述人车耦合模块。
[0039]
更优选的,所述人车耦合模块的工作流程具体如下:
[0040]
步骤b1、记交叉口某一方向斑马线处行人控制相位处于允许行人通行的绿灯及绿灯闪烁时的状态为该方向的行人相位。当交叉口某一方向处于行人相位时,若所述雷达测速装置能检测到速度说明相应的扫描区域仍然有所述行人过街,则将存在行人的信息传递给相应的所述路侧感应装置;
[0041]
所述路侧感应装置将行人信息传给车辆的车载obu,使得车辆驾驶人员及时获知行人信息;
[0042]
步骤b2、人车进行信息交互时,车辆的车载obu进入交叉口时,通过通信将车辆转向信息和分析轨迹信息传至相应的所述路侧感应装置;
[0043]
在除设置右转专用道路口外,在右转车辆与过街行人存在冲突时,结合相应的所述路侧感应装置来进行人车轨迹分析,将路口一般分成不需要二次过街路口和二次过街的大型路口,但是人车轨迹分析方法相同;
[0044]
通过小型交叉口车辆的转弯位置如下:
[0045][0046][0047]
其中,y
car
为车辆转弯进入交叉口纵向偏移量;x
car
为车辆转弯进入交叉口横向偏移量;ts为行人相位时车辆开始进入转弯时刻;tn为行人相位时的当前时刻;dt为以t为变量的微变量;ω为车辆转向车体水平角;v
car
为车辆转弯速度;
[0048]
若则车载obu正常,否则提示当前行驶错误,并修正行驶保证车辆转弯纵向偏移至符合条件;
[0049]
其中,r为交叉口设计转弯半径;ε为车身与路缘安全距离;width
car
为车辆宽度;
[0050]
行人相位时,靠近右转车道行人位置纵向分布为:
[0051]yped
=v
·
tn;
[0052]
其中,y
ped
为靠近右转车道行人纵向偏移量;
[0053]
当y
car-r+ε<y
ped
<y
car-r+ε+width
car
时,提醒车辆前方路径存在行人,礼让行人通过;
[0054]
步骤b3、当所述路侧感应装置将获取到车辆转向信息传送至信号灯上所述声音灯
光装置时,所述声音灯光装置提示过往行人注意转向车辆并及时安全过街;
[0055]
步骤b4、所述人车耦合模块获取人车信息后,将人车信息传入所述信号控制模块,并且在行人相位末期即绿灯时间快结束时,将所述声音灯光装置进行灯光转换提示,开始转换播报,提示未进入过街区域人性不要过街,能够过街行人快速通行。
[0056]
更优选的,所述信号控制模块的工作流程具体如下:
[0057]
步骤c1、从交叉口信号机获取得到控制方案,得到信号机中原始的控制方案的行人信号相位行人信号相位、绿灯时长和信号周期时长;
[0058]
步骤c2、调整交叉口行人安全相位。
[0059]
更优选的,所述步骤c2包括如下步骤:
[0060]
步骤c2.1、根据行人过街区域获取速度进行划分,判断过街区域是否存在残疾人、老人和儿童,具体如下:
[0061]
将行人步速阈值v0设定为《中国城市道路交通规划设计规范》中规定的速度;
[0062]
当0<v+τ<v0时,其中τ为所述雷达测速装置误差,说明检测存在残障人士,此时为第一种情况;
[0063]
当v+τ≥v0时,说明检测不存在残障人士,此时为第二种情况;
[0064]
获取得到的行人步速进行分类,若速度分类出现第二种情况,保持原先的行人信号控制策略,若出现第一种控制策略则进行交叉口行人相位的策略调整,并执行以下步骤;
[0065]
步骤c2.2、若交叉口某一方向行人相位中绿灯时间为g
n_man
,行人相位末期将行人相位中行人速度进行筛选,其中的最小值即为v
min
;
[0066]
步骤c2.3、计算最小速度过街参数与剩余过街需要时间,如下:
[0067][0068][0069][0070][0071][0072]
其中,r
dis
为雷达测速装置距离检测到行人的直线距离;
[0073]
ped_dis为行人完成过街所需的剩余距离,进一步地根据行人行进方向按照靠近或远离所述雷达测速装置赋正负值;
[0074]
ped_dis
+
为行人靠近所述雷达测速装置时,此时v
min
也为正;ped_dis-为行人远离所述雷达测速装置时,此时v
min
亦为负;b为调制带宽;t
inf
为调制信号周期;t
+
为行人靠近所述雷达测速装置安全过街最短时间;t-为行人远离所述雷达测速装置安全过街最短时间;
[0075]
步骤c2.4、计算不需要二次过街十字交叉口重新设计行人相位中新绿灯时间,如下:
[0076]
行人过街最短时间t=min{|t
+
,t-|};
[0077]
一般地,当不同两个方向同时开启行人绿灯时,需要补充延迟的行人绿灯时间ta=max{t
a1
,t
a2
},a代表对应交叉口相位,a1和a2表示在相位a下同时开启行人绿灯的两个方向;
[0078]
则相位a内不需要二次过街交叉口新行人相位绿灯及闪烁时间g
a_new_man1
=g
a_man
+ta;
[0079]
其中,g
a_man
为现状行人相位绿灯及绿灯闪烁时间;
[0080]
补充的行人绿灯时间可将灯光设计成为闪烁,并且语音提示过街行人“请过街行人快速过街,未过街行人耐心等待”,其他相位可保持原方案;
[0081]
对应交叉口该方向进口道的红灯时长调整为:
[0082]ra_new1
=r
a1
+ta;
[0083]
其中,r
a_new1
为不需要二次过街重新设计进口道红灯时长;r
a1
为不需要二次过街原进口道红灯时长;
[0084]
不需要二次过街交叉口重新设计总体交叉口信号总时长为:
[0085][0086]
其中,t
all_new1
为调整后的不需要二次过街交叉口总体交叉口信号总时长;t
all1
为不需要二次过街交叉口信号原总时长;ia为表示相位a是否需要补充行人绿灯相位,取0或1。
[0087]
更优选的,若是二次过街的十字路口原方案是无左转专用相位,普通情况二次过街十字交叉口重新设计行人相位中新绿灯时间为:
[0088][0089]
其中,g
a_new_man2
相位a内为二次过街交叉口新行人相位绿及闪烁灯时间;
[0090]
补充的行人绿灯时间灯光设计成为闪烁,并且语音提示过街行人“请过街行人快速到中央安全岛或快速过街,未过街行人耐心等待”,其他相位不做调整;
[0091]
对应进口道红灯时长调整为:
[0092][0093]
其中,r
a_new2
为不需要二次过街重新设计进口道红灯时长;r
a2
为不需要二次过街原进口道红灯时长;
[0094]
二次过街交叉口重新设计总体交叉口信号总时长为:
[0095][0096]
其中,t
all_new2
为调整后不需要二次过街交叉口总体交叉口信号总时长;t
all2
为二次过街交叉口信号原总时长。
[0097]
更优选的,若是二次过街的十字路口原方案是有左转专用相位,还需要进行相位的重新调整;具体如下:
[0098]
若南北方向行人过街,东西方向单侧道路没有过街行人,将南北直行直接进入黄
灯然后进入红灯,并将东进口直行与南进口左转同时放行,接下来西进口直行与北进口左转同时放行,东西方向左转,后期再转为原方案相位,其中上述东西方向行人过街同理;
[0099]
东进口直行与南进口左转绿灯时间g
new1
为:g
new1
=g1;其中g1为调整前南进口左转绿灯时间;
[0100]
西进口直行与北进口左转绿灯时间g
new2
为:g
new2
=g2;其中g2为调整前北进口左转绿灯时间;
[0101]
其余配时方案与调整前相同,则二次过街交叉口调整后总体交叉口信号总时长为:
[0102][0103]
其中,g
ew1
为东西进口调整前左转绿灯时间;g
nsz
为单侧没有行人绿灯时间;为四个方向调整前红灯时间;为四个方向原方案黄灯时间。
[0104]
本发明的有益效果:
[0105]
本发明的应用打通了行人过街控制中的人-车-路之间的信息链条。本发明通过人车感知模块和人车耦合模块,实现了基于行人与车辆信息获取及车路交互的行人声光提示、信号控制等,实现了人-车-路多方的信息互联,解决了传统行人过街控制系统相对独立的弊病。
[0106]
本发明在行人过街控制中透漏出了对特殊人群的关怀。本发明通过雷达检测装置采集的数据,实现了行人步速进行分类,提高特殊行人的检测准确性,有利制定更加适宜特殊人群通行的行人信号控制方案,为特殊行人过街提供便利。
[0107]
本发明提升城市道路交通的管理与控制能力,实现了行人过街控制和交叉口控制联动,使得城市道路交通的管理与控制更加均衡合理,能够进一步提高道路交通运行效率。
[0108]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0109]
图1示出本发明一实施例的流程图。
具体实施方式
[0110]
实施例
[0111]
如图1所示,基于人车耦合的安全过街控制方法;通过人车感知模块感知行人与交叉口过往车辆速度方位特征,通过人车耦合模块进行信息交互,实现人车信息共享与提示,通过信息控制模块互馈式信息模块处理方式,实现行人安全过街信号控制与预警;
[0112]
人车感知模块结合路侧感应装置与雷达测速装置用于在过街路段中对过街的行人进行信息收集,提取行人过街速度并对过街的行人进行状态研判,获取车辆驶入信息;
[0113]
人车耦合模块用于判断过街的行人中是否存在残障人士、老年人或者儿童的信息,人车信息双向提示,采用回馈式信息机制通过路侧装置将行人的信息传输给车辆的车载终端,同时车辆信息被路侧装置所接受反馈给人车感知信息模块;
[0114]
信号控制模块利用获取人车信息进行交叉口相位时间与行人信号控制策略调整,将控制调整后传输给显示器策略实施;
[0115]
信号控制模块包括行人信号控制器与交叉口信号控制器;
[0116]
路侧感应装置与雷达测速装置通过专用信道进行信息交互处理,信息反馈至路口信号机进行对应过街的交叉口与行人信号相位、绿灯时长、信号周期时长策略调整,并将交叉口区分为不需要二次过街十字交叉口与需要二次过街十字交叉口。
[0117]
在某些实施例中,雷达测速装置设置在行人信号灯上,将扫描区域投射到行人的过街区域,用于将行人速度信息转变成多普勒频率信息进行输出,降噪后筛选处理出行人的步行速度,再根据行人的步行速度进行分类;
[0118]
路侧感应装置包括分别设在交叉口四个行人斑马线进出口位置,能够通过车载obu进行lte-v通信;
[0119]
车载终端支持lte-v信息采集和存储,采集包括交叉口车辆产生的速度、转向实时信息。
[0120]
在实际应用中,路侧感应装置rsu,road side unit的缩写,能够与车载obu,on board unit的缩写,进行lte-v,long term evolution-vehicle的缩写,通信。
[0121]
在某些实施例中,人车耦合模块有人车信息交互实施;
[0122]
路侧感应装置接入车辆的车载obu信息,进行车辆的信息发送与获取行人信息;
[0123]
行人通过信号灯上加装的声音灯光装置进行过街提示。
[0124]
在某些实施例中,信号控制模块包括行人信号控制器与交叉口控制器;
[0125]
路侧感应装置与雷达测速装置通过专用信道进行信息交互处理,决策信息反馈至信号控制模块,通过信号控制模块进行对应过街的交叉口与行人信号相位、绿灯时长和信号周期时长策略的调整。
[0126]
在某些实施例中,人车感知模块的工作流程具体如下:
[0127]
步骤a1、结合每一交叉口过街道路不同形式,设置在交叉口的每一路侧感应装置分别安置行人过街四个方向;
[0128]
行人信号灯上设置的雷达测速装置的水平夹角为θ;
[0129]
雷达测速装置的安装高度为h,扫描区域覆盖相应的行人的过街区域,距离扫描区域的最近距离为d;
[0130]
行人的过街区域的单侧的长度为zh_l;
[0131]
步骤a2、校验雷达测速装置,满足以下关系:
[0132][0133]
步骤a3、计算雷达测速装置对应的行人的过街区域的参数,以及行人的步行速度,具体如下:
[0134]
fa=δf-fd;
[0135]
fb=δf+fa;
[0136][0137]
其中,δf为雷达测速装置检测行人发射信号与反射信号的频率差;fd为雷达测速
装置与行人相对运动的多普勒频移;fa为前半周期正向调频的差频;fb为后半周期负向调频的差频;f0为雷达测速装置发射波中心频率;c为光速;v为行人速度;所有数值取正负中规定,靠近路侧感应装置的行人的所有数值为正,远离路侧感应装置的行人的所有数值为负;
[0138]
步骤a4、车辆信息的感知,即通过路侧感应装置获取接入车辆的车载obu信息;
[0139]
车辆通过车载obu持续上传车辆位置及运动信息至路侧感应装置;
[0140]
路侧感应装置接收记录车辆的速度转向信息;
[0141]
步骤a5、路侧感应装置获取信息进行分析,选出存在转向车辆的信息,将车辆信息与过街行人的速度信息传入人车耦合模块。
[0142]
在某些实施例中,人车耦合模块的工作流程具体如下:
[0143]
步骤b1、记交叉口某一方向斑马线处行人控制相位处于允许行人通行的绿灯及绿灯闪烁时的状态为该方向的行人相位。当交叉口某一方向处于行人相位时,若雷达测速装置能检测到速度说明相应的扫描区域仍然有行人过街,则将存在行人的信息传递给相应的路侧感应装置;
[0144]
路侧感应装置将行人信息传给车辆的车载obu,使得车辆驾驶人员及时获知行人信息;
[0145]
步骤b2、人车进行信息交互时,车辆的车载obu进入交叉口时,通过通信将车辆转向信息和分析轨迹信息传至相应的路侧感应装置;
[0146]
在除设置右转专用道路口外,在右转车辆与过街行人存在冲突时,结合相应的路侧感应装置来进行人车轨迹分析,将路口一般分成不需要二次过街路口和二次过街的大型路口,但是人车轨迹分析方法相同;
[0147]
通过小型交叉口车辆的转弯位置如下:
[0148][0149][0150]
其中,y
car
为车辆转弯进入交叉口纵向偏移量;x
car
为车辆转弯进入交叉口横向偏移量;ts为行人相位时车辆开始进入转弯时刻;tn为行人相位时的当前时刻;dt为以t为变量的微变量;ω为车辆转向车体水平角;v
car
为车辆转弯速度;
[0151]
若则车载obu正常,否则提示当前行驶错误,并修正行驶保证车辆转弯纵向偏移至符合条件;
[0152]
其中,r为交叉口设计转弯半径;ε为车身与路缘安全距离;width
car
为车辆宽度;
[0153]
行人相位时,靠近右转车道行人位置纵向分布为:
[0154]yped
=v
·
tn;
[0155]
其中,y
ped
为靠近右转车道行人纵向偏移量;
[0156]
当y
car-r+ε<y
ped
<y
car-r+ε+width
car
时,提醒车辆前方路径存在行人,礼让行人通过;
[0157]
步骤b3、当路侧感应装置将获取到车辆转向信息传送至信号灯上声音灯光装置时,声音灯光装置提示过往行人注意转向车辆并及时安全过街;
[0158]
步骤b4、人车耦合模块获取人车信息后,将人车信息传入信号控制模块,并且在行人相位末期即绿灯时间快结束时,将声音灯光装置进行灯光转换提示,开始转换播报,提示未进入过街区域人性不要过街,能够过街行人快速通行。
[0159]
在某些实施例中,信号控制模块的工作流程具体如下:
[0160]
步骤c1、从交叉口信号机获取得到控制方案,得到信号机中原始的控制方案的行人信号相位行人信号相位、绿灯时长和信号周期时长;
[0161]
步骤c2、调整交叉口行人安全相位。
[0162]
在某些实施例中,步骤c2包括如下步骤:
[0163]
步骤c2.1、根据行人过街区域获取速度进行划分,判断过街区域是否存在残疾人、老人和儿童,具体如下:
[0164]
将行人步速阈值v0设定为《中国城市道路交通规划设计规范》中规定的速度;
[0165]
当0<v+τ<v0时,其中τ为雷达测速装置误差,说明检测存在残障人士,此时为第一种情况;
[0166]
当v+τ≥v0时,说明检测不存在残障人士,此时为第二种情况;
[0167]
获取得到的行人步速进行分类,若速度分类出现第二种情况,保持原先的行人信号控制策略,若出现第一种控制策略则进行交叉口行人相位的策略调整,并执行以下步骤;
[0168]
步骤c2.2、若交叉口某一方向行人相位中绿灯时间为g
n_man
,行人相位末期将行人相位中行人速度进行筛选,其中的最小值即为v
min
;
[0169]
步骤c2.3、计算最小速度过街参数与剩余过街需要时间,如下:
[0170][0171][0172][0173][0174][0175]
其中,r
dis
为雷达测速装置距离检测到行人的直线距离;
[0176]
ped_dis为行人完成过街所需的剩余距离,进一步地根据行人行进方向按照靠近或远离雷达测速装置赋正负值;
[0177]
ped_dis
+
为行人靠近雷达测速装置时,此时v
min
也为正;ped_dis-为行人远离雷达测速装置时,此时v
min
亦为负;b为调制带宽;t
inf
为调制信号周期;t
+
为行人靠近雷达测速装置安全过街最短时间;t-为行人远离雷达测速装置安全过街最短时间;
[0178]
步骤c2.4、计算不需要二次过街十字交叉口重新设计行人相位中新绿灯时间,如下:
[0179]
行人过街最短时间t=min{|t
+
,t-|};
[0180]
一般地,当不同两个方向同时开启行人绿灯时,需要补充延迟的行人绿灯时间ta=max{t
a1
,t
a2
},a代表对应交叉口相位,a1和a2表示在相位a下同时开启行人绿灯的两个方向;
[0181]
则相位a内不需要二次过街交叉口新行人相位绿灯及闪烁时间g
a_new_man1
=g
a_man
+ta;
[0182]
其中,g
a_man
为现状行人相位绿灯及绿灯闪烁时间;
[0183]
补充的行人绿灯时间可将灯光设计成为闪烁,并且语音提示过街行人“请过街行人快速过街,未过街行人耐心等待”,其他相位可保持原方案;
[0184]
对应交叉口该方向进口道的红灯时长调整为:
[0185]ra_new1
=r
a1
+ta;
[0186]
其中,r
a_new1
为不需要二次过街重新设计进口道红灯时长;r
a1
为不需要二次过街原进口道红灯时长;
[0187]
不需要二次过街交叉口重新设计总体交叉口信号总时长为:
[0188][0189]
其中,t
all_new1
为调整后的不需要二次过街交叉口总体交叉口信号总时长;t
all1
为不需要二次过街交叉口信号原总时长;ia为表示相位a是否需要补充行人绿灯相位,取0或1。
[0190]
在某些实施例中,若是二次过街的十字路口原方案是无左转专用相位,普通情况二次过街十字交叉口重新设计行人相位中新绿灯时间为:
[0191][0192]
其中,g
a_new_man2
相位a内为二次过街交叉口新行人相位绿及闪烁灯时间;
[0193]
补充的行人绿灯时间灯光设计成为闪烁,并且语音提示过街行人“请过街行人快速到中央安全岛或快速过街,未过街行人耐心等待”,其他相位不做调整;
[0194]
对应进口道红灯时长调整为:
[0195][0196]
其中,r
a_new2
为不需要二次过街重新设计进口道红灯时长;r
a2
为不需要二次过街原进口道红灯时长;
[0197]
二次过街交叉口重新设计总体交叉口信号总时长为:
[0198][0199]
其中,t
all_new2
为调整后不需要二次过街交叉口总体交叉口信号总时长;t
all2
为二次过街交叉口信号原总时长。
[0200]
在某些实施例中,若是二次过街的十字路口原方案是有左转专用相位,还需要进行相位的重新调整;具体如下:
[0201]
若南北方向行人过街,东西方向单侧道路没有过街行人,将南北直行直接进入黄灯然后进入红灯,并将东进口直行与南进口左转同时放行,接下来西进口直行与北进口左
转同时放行,东西方向左转,后期再转为原方案相位,其中上述东西方向行人过街同理;
[0202]
东进口直行与南进口左转绿灯时间g
new1
为:g
new1
=g1;其中g1为调整前南进口左转绿灯时间;
[0203]
西进口直行与北进口左转绿灯时间g
new2
为:g
new2
=g2;其中g2为调整前北进口左转绿灯时间;
[0204]
其余配时方案与调整前相同,则二次过街交叉口调整后总体交叉口信号总时长为:
[0205][0206]
其中,g
ew1
为东西进口调整前左转绿灯时间;g
nsz
为单侧没有行人绿灯时间;为四个方向调整前红灯时间;为四个方向原方案黄灯时间。
[0207]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1