交通信息不确定环境下网联自动车队稳定性分析方法
1.本发明涉及网联自动车队跟驰特性建模及稳定性分析技术,特别涉及交通信息不确定环境下网联自动车队稳定性分析方法。
背景技术:
2.随着城市化进程的加快,人们的生活水平有了前所未有的提升,机动车作为人们重要的代步工具,已经得到了广泛的普及。机动车数量的增加不仅造成停车困难,也导致许多城市的交通经常出现瘫痪,交通拥堵已经成为常态,这样不仅造成了资源的浪费,同时汽车排放的尾气也给城市的环境治理带来了沉重的负担。为了解决关于交通的一系列问题,国内外众多学者已经从不同的角度对交通流的演化机理、交通拥堵的形成及消散机制展开了研究,根据不同交通现象交通流动的本质,指导实际的交通设计。在交通科学中,交通流动力学是最为基础的学科,通过运用多学科的知识,分析不同交通系统下人、车及路之间的相关性,找到其内在的相互关系。目前该学科正在逐步走向成熟,也代表着现代交通系统正在不断地走向完善,基于交通流动力学,建立能够反映不同交通系统一般交通特性的交通流模型,运用相关的分析方法和工具,揭示不同交通系统的交通流动演化特性,用来指导实际的交通设计与规划。
3.未来,交通流将由网联自动车构成,也即:网联自动车队,在构建网联自动车队模型的过程中,由于设备故障、网络波动和设备精度等原因,车辆获取的信息会与实际的信息之间存在一定的差异,这种差异导致了交通环境具有信息不确定的特征,这种信息的不确定特征会通过影响单辆车的运动状态,会间接地影响整个网联自动车队系统内车辆运行的状态,这直接关系着系统的交通流稳定性。现有模型在对网联自动车队进行建模时,较少考虑到相关交通信息的不确定性特征,因此构造的网联自动车队模型并不能完全反应实际交通状况,使得稳定性研究具有一定的偏差。
技术实现要素:
4.发明目的:针对以上问题,本发明目的是提供一种交通信息不确定环境下网联自动车队稳定性分析方法,针对交通信息不确定环境下的网联自动车队,通过真车实验确定网联自动车队的信息不确定平均水平;在基础的跟驰模型基础上,利用交通信息不确定平均水平构建网联自动车队动态模型,分析在信息不确定性情况下分析网联自动车队的稳定性。
5.技术方案:本发明的一种基于交通信息不确定性特征的交通流稳定性分析方法,包括:获取网联自动车队中车辆的基本信息,建立相应的动态跟驰模型;通过真车实验确定网联自动车队的信息不确定平均水平;在动态跟驰模型基础上,利用信息不确定平均水平构建网联自动车队动态模型;引入扰动,计算扰动状态下的网联自动车队动态模型的传递函数;根据传递函数计算网联自动车队的稳定性条件,利用稳定性条件判断网联自动车队的稳定性。
6.进一步,动态跟驰模型表达式为:
[0007][0008]
式中,vn(t)表示当前车辆n在t时刻的速度;sn(t)表示第n-1辆车和第n辆车在t时刻的车头间距,sn(t)=x
n-1
(t)-xn(t),xn(t)和x
n-1
(t)分别表示第n辆车及第n-1辆车在t时刻的位置;δvn(t)表示第n-1辆车和第n辆车在t时刻的速度差,δvn(t)=v
n-1
(t)-vn(t);f(
·
)表示非线性函数。
[0009]
进一步,在网联自动车队中,当前车辆获取的位置信息和速度信息与实际的信息之间存在一定的差异,其中,位置信息的不确定性会导致前后两辆车之间的车头间距信息变得不精确,通过进行真车实验,获取当前网联自动车队的信息不确定性平均水平,包括:车头间距信息不确定性平均水平ds和速度信息不确定性平均水平dv。
[0010]
进一步,将信息不确定性平均水平整合到车辆的动态跟驰模型中,得到交通信息不确定环境下的网联自动车队动态跟驰模型,表达式为:
[0011][0012]
当ds<0且dv<0时,表示车辆获取的车头间距和速度信息比实际车头间距和速度信息小;
[0013]
当ds>0且dv>0时,表示车辆获取的车头间距和速度信息比实际车头间距和速度信息大;
[0014]
当ds=0且dv=0时,表示车辆获取的车头间距和速度信息与实际车头间距和速度信息一致。
[0015]
引入扰动,计算扰动状态下的网联自动车队动态模型的传递函数包括:
[0016]
(1)、初始状态下网联自动车队处于稳定状态,车队中每辆车的速度和车头间距均会保持一致,且每辆车的加速度为零,稳定状态下车队跟驰模型表示为:
[0017]
f(ve,se,0)=0
[0018]
式中,ve代表网联自动车队处于稳态时所有车辆的速度,se代表网联自动车队处于稳态时所有车辆之间的车头间距;
[0019]
(2)、在网联自动车队稳定状态下,引入扰动,第n辆车受到扰动的影响,在该扰动影响下,第n辆车速度和车头间距会与平衡态的速度和车头间距之间出现差异,该差异由以下公式表示:
[0020][0021]
式中,yn(t)和un(t)分别表示车头间距和速度的扰动;
[0022]
(3)、通过一阶泰勒展开,将网联自动车队动态模型进行线性近似处理,省略高阶项,得到的网联自动车队系统动态方程为:
[0023]
[0024]
式中,fs、fv和f
δv
分别表示网联自动车队控制模型在平衡点对车头间距、速度和速度差的偏导数,表达式分别为:
[0025][0026][0027][0028]
(4)、将扰动带入至网联自动车队系统动态方程中,得到扰动下网联自动车队系统动态方程表达式为:
[0029][0030][0031]
进一步,引入扰动,计算扰动状态下的网联自动车队动态模型的传递函数还包括:
[0032]
(5)、将扰动下车队系统动态方程进行拉普拉斯变换,得到扰动下网联自动车队系统在复数域的动态方程为:
[0033][0034]
式中,un(s)和yn(s)分别为un(t)和yn(t)进行拉普拉斯变换之后的形式,s表示复变量;
[0035]
(6)、根据传递函数定义,计算扰动下网联自动车队系统的传递函数为:
[0036][0037]
将传递函数域转变至频率域,得到的表达式为:
[0038][0039]
式中,j和ω分别表示频率域的虚数与频率。
[0040]
进一步,根据传递函数计算网联自动车队的稳定性条件包括:
[0041]
当网联自动车队处于稳定状态时,传递函数小于1,则有|g(s)|=|g(jω)|<1,由
此计算得到网联自动车队的中性稳定性条件为:
[0042][0043]
当f>0时,网联自动车队处于稳定状态;反之,则网联自动车队处于不稳定状态。
[0044]
有益效果:本发明与现有技术相比,其显著优点是:本发明针对交通信息不确定环境下的网联自动车队,通过真车实验确定车队系统的信息不确定性平均水平,将信息不确定平均水平整合到基础的网联自动车队跟驰模型中,构建相应的网联自动车队跟驰模型,能够更好地反映真实的交通流特性;同时,通过本发明提供的网联自动车队稳定性分析方法,可以获得交通信息不确定环境下的网联自动车队稳定条件,并能获取交通信息不确定性水平值的大小对网联自动车队稳定性产生的影响趋势;本发明方法扩展了基础的网联自动车队跟驰模型,能够为未来智能网联环境下出现的不确定性状况提供相应的网联自动车队建模和稳定性分析方法,同时为交通控制及驾驶策略的设计提供基本依据,从而提高网联自动车队的稳定性,有效地缓解交通流拥堵。
附图说明
[0045]
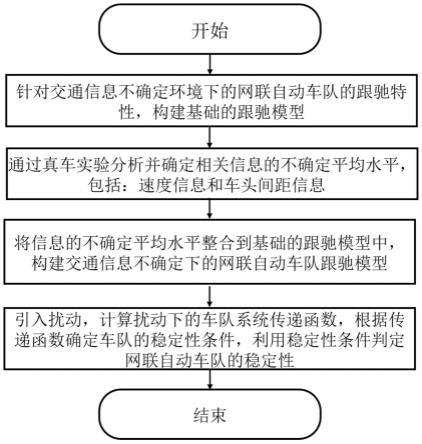
图1是本发明的一个实施方式流程图;
[0046]
图2是在不同速度信息不确定性水平下网联自动车队稳定曲线的变化图;
[0047]
图3是在不同车头间距信息不确定性水平下网联自动车队稳定曲线的变化图。
具体实施方式
[0048]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。
[0049]
如图1,本实施例所述的交通信息不确定环境下网联自动车队稳定性分析方法,包括:获取网联自动车队中车辆的基本信息,建立相应的动态跟驰模型;分析并确定网联自动车队的信息不确定平均水平;在动态跟驰模型基础上,利用信息不确定平均水平构建网联自动车队动态模型;引入扰动,计算扰动状态下的车队动态模型的传递函数;根据传递函数计算网联自动车队的稳定性条件,利用稳定性条件判断网联自动车队的稳定性。
[0050]
鉴于智能驾驶员模型能够较好的反映真实的驾驶环境,因此本实施例以其作为车队的跟驰控制策略模型,表达式为:
[0051][0052][0053]
式中,vn(t)表示当前车辆n在t时刻的速度;sn(t)表示第n-1辆车和第n辆车在t时刻的车头间距,sn(t)=x
n-1
(t)-xn(t),xn(t)和x
n-1
(t)分别表示第n辆车及第n-1辆车在t时刻的位置;δvn(t)表示第n-1辆车和第n辆车在t时刻的速度差,δvn(t)=v
n-1
(t)-vn(t);v0表示自由流速度,表示为当前车辆的渴望车头间距,a和b分别代表车辆所能达到的最
大加速度和最大减速度,s0代表车辆之间的最小车头间距,t表示当前车辆的期望车头时距。
[0054]
在网联自动环境中,导致交通信息出现不确定性的原因主要包括以下两点:
[0055]
(1)、网联自动车可以借助雷达、红外线等设备获取自身和外界的信息,如速度和位置等,但这个过程中会出现各种意外的情况,如出现设备故障、设备失准等,在这些情况下,车辆依据自身设备获取的信息就会与实际的信息之间存在差异,便会产生信息的不确定性;
[0056]
(2)、网联自动车具有网络通信的功能,可以通过网络通信与其他车辆进行信息共享,但是会出现设备失灵、网络波动等状况,因此也会导致车辆获取的信息与实际的信息之间存在差异,由此也会产生信息的不确定性。
[0057]
由于车辆的跟驰模型主要与车辆的速度,前后两辆车之间的速度差和车头间距来构造的,因此,本实施例中的交通信息不确定场景主要包含有车头间距信息和速度信息的不确定性,具体表示为以下情形:
[0058]
(a)、车辆获取的速度信息vn(t)小于实际的速度获取的速度信息vn(t)大于实际的速度或者获取的速度信息vn(t)等于实际的速度分别表示为和
[0059]
(b)、车辆获取的车头间距信息sn(t)小于实际的车头间距获取的车头间距信息sn(t)大于实际的车头间距或者获取的车头间距信息sn(t)等于实际的车头间距分别表示为和
[0060]
通过真车实验,获得车辆获取信息与实际信息之间的差异,确定信息的不确定水平,即:车头间距信息不确定平均水平ds和速度信息不确定性平均水平dv,将两者整合到车辆动态跟驰模型中,得到网联自动车队的动态模型,表达式为:
[0061][0062][0063]
根据本发明提出的车队稳定性分析方法,只需要计算网联自动车队的控制模型在平衡点对车头间距、速度和速度差的偏导数,分别为:
[0064][0065][0066]
[0067][0068]
将其代入到网联自动车队的稳定性条件,也得到中性稳定性函数的表达式为:
[0069][0070]
当f>0时,网联自动车队处于稳定状态;反之,则网联自动车队处于不稳定状态。
[0071]
根据中性稳定性函数的表达式,绘制相应的网联自动车队稳定区域图,如图2和图3所示。从图2可以看出,当dv>0时,也即网联自动车队获取的速度信息大于实际的速度时,随着不确定性平均水平值的增加,车队的不稳定区域减小,车队的稳定性增大,表现出正的速度信息不确定平均水平值对网联自动车队的稳定性是有益的;当dv<0时,也即网联自动车队获取的速度信息小于实际的速度时,随着不确定性平均水平绝对值的增加,车队的稳定区域减小,车队的稳定性降低,表明:负的速度信息不确定平均水平值对网联自动车队的稳定性是有害的。同时,从图3也可以看出车头间距信息对网联自动车队稳定性的影响,当ds>0时,也即网联自动车队获取的车头间距信息大于实际的车头间距时,随着不确定性平均水平值的增加,车队的不稳定区域减小,车队的稳定性增大,表现出正的车头间距信息不确定平均水平值对网联自动车队的稳定性是有益的;当ds<0时,也即网联自动车队获取的车头间距信息小于实际的车头间距时,随着不确定性平均水平绝对值的增加,网联自动车队的稳定区域减小,网联自动车队的稳定性降低,表明:负的车头间距信息不确定平均水平值对网联自动车队的稳定性是有害的。
[0072]
通过上述技术方案,本发明提供的交通信息不确定环境下网联自动车队稳定性分析方法,通过针对交通信息不确定环境下网联自动车队,分析并确定网联自动车队的信息不确定平均水平;在基础的跟驰模型基础上,利用交通信息不确定平均水平构建网联自动车队动态模型,分析在信息不确定性情况下分析网联自动车队的稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1