基于多地磁传感器的单车道车辆轨迹关联方法
本发明属于物理,更进一步涉及数据处理中的一种基于多地磁传感器的单车道车辆轨迹关联方法。本发明可用于单车道场景下,通过多个地磁传感器检测同一时刻所有车辆的轨迹信息,获取每个时刻单车道上行驶车辆的关联轨迹。
背景技术:
1、目前,在公路交通智能化中,获取单车道车辆的轨迹是一个日益重要的问题。这可以帮助交通管理者更好地了解道路上的车辆运动情况,为交通流量预测、交通拥堵预警、安全驾驶等提供有价值的数据。目前,单车道场景中通常使用摄像机、雷达等传感器来对车辆轨迹进行关联。然而这类传感器部署环境较为特殊,通常需要安装在龙门架上,难以大规模部署,成本较高,且检测精度受天气影响。为了改进智能交通系统(intelligent trafficsystem,简称its)并丰富获取数据形式的种类,地磁传感器也正在交通系统中广泛部署,以收集单车道上车辆的实时轨迹信息,地磁传感器的部署通常不受场景限制,且成本较低,检测不受环境影响。然而在车辆轨迹关联方面,传统的数据关联方案往往拥有较高的计算复杂度,效率较低,难以实现轨迹的实时关联。这对使用地磁传感器来实现车辆轨迹的实时关联方面提出了独特的挑战。这种轨迹关联问题不仅会影响到智能交通系统对车辆行驶轨迹的获取,还会影响到后续对车辆行为状态的判定。
2、交通运输部路网监测与应急处置中心在其共同申请的专利文献“基于雷达和视频融合的车辆轨迹跟踪方法及系统”(申请号:202210867558.4,申请公布号:cn 115327527a)中提出一种基于雷达和摄像机融合的单车道车辆轨迹关联方法。该方法通过设置雷达设备和摄像机设备的时间戳同步目的达到数据关联,通过得到雷达信息的时间戳和摄像机信息的时间戳,实现两者传感器数据关联的方法。该方法存在的不足之处在于,摄像机和雷达等传感器部署环境特殊,通常安装在龙门架上,难以大规模部署,成本较高;且检测精度受天气影响,环境恶劣时会出现难以检测车辆的问题,从而进一步影响单车道车辆轨迹关联。
3、m.hassaballah等人在其发表的论文“vehicle detection and tracking inadverse weather using a deep learning framework”(ieee transactions onintelligent transportation systems,2021pp.4230-4242)中提出了一种单车道车辆轨迹关联方法。该方法的步骤是,首先将传统高斯混合概率假设密度滤波器的跟踪器与分层数据关联(hda)联合使用,然后采用多尺度卷积神经网络的车辆检测和跟踪算法实现了单车道的车辆轨迹关联。该方法存在的不足之处是,使用多尺度深度卷积神经网络的鲁棒车辆检测和跟踪算法比较复杂,效率较低,无法用于在公路智能化中,对单车道车辆实时进行轨迹关联的场景。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种基于多地磁传感器的单车道车辆轨迹关联方法,用于解决当前车辆轨迹关联算法复杂,并且摄像机和雷达等传感器成本较高,受天气影响,难以大规模部署并且当前使用的基于地磁传感器的车辆轨迹关联方法难以实现数据关联的问题。
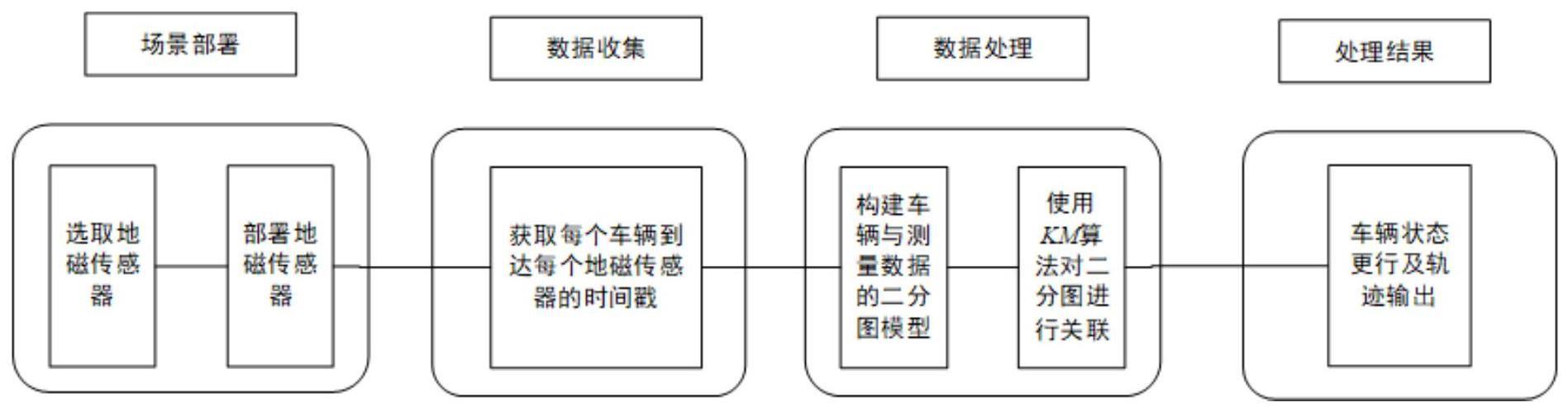
2、实现本发明目的的技术思路是,本发明根据需要关联的车辆轨迹范围选用多个同一型号的地磁传感器将该传感器部署后,将所有地磁传感器等间距的部署在单车道一侧的车道线上,地磁传感器的部署方向与车辆的行驶方向相同;采用gps授时技术对所有地磁传感器进行统一授时。由于本发明使用的地磁传感器成本较低,且不受天气影响,便于大规模部署,能够解决现有技术采用摄像机或雷达等传感器带来的成本高,并且受天气影响严重的问题。本发明使用同一型号的地磁传感器,采用统一授时技术,克服了现有技术中使用不同传感器且未进行精准对时时,会存在的数据错误关联问题。本发明使用低计算复杂度的二分图匹配的km数据关联算法,实现单车道车辆轨迹的实时关联,从而获得准确的单车道车辆轨迹信息。
3、实现本发明目的的具体步骤如下:
4、步骤1,根据需要关联的车辆轨迹范围,选用m个同一型号的地磁传感器;
5、步骤2,部署地磁传感器并授时:
6、步骤2.1,将m个地磁传感器每隔n米等间距的部署在单车道一侧的车道线上,地磁传感器的部署方向与车辆的行驶方向相同,n的取值取决于地磁传感器的检测范围;
7、步骤2.2,采用gps授时技术对每个地磁传感器进行统一授时;
8、步骤3,计算每辆车辆到达每个地磁传感器的时间戳:
9、使用车辆检测算法,每个地磁传感器分别检测每辆车进入该传感器时刻的时间戳和离开时刻的时间戳,将两个时间戳的均值作为该车到达该地磁传感器的时间戳,将每辆车辆到达每个地磁传感器的时间戳与其对应的地磁传感器编号共同上传至计算设备;
10、步骤4,构建每个地磁传感器的待关联二分图模型:
11、步骤4.1,计算设备将到达每个地磁传感器的同一时刻所有车辆的时间戳分为一类;
12、步骤4.2,按照下式,计算每辆车从当前地磁传感器到达下一个地磁传感器的预测时间戳:
13、
14、其中,为第i辆车从第k个地磁传感器到达第k+1个地磁传感器时刻的预测时间戳,i=1,2,…,i,i为到达第k个地磁传感器时所有车辆的总数,k=1,2,…,m-1,为第i辆车到达第k个地磁传感器时刻的测量时间戳,xk+1为第k+1个地磁传感器的坐标位置,xk为第k个地磁传感器的坐标位置,为第i辆车经过第k个地磁传感器时刻的速度;
15、步骤4.3,计算每辆车的预测时间戳与其到达时间对应地磁传感器的车辆测量时间戳的权值:
16、
17、其中,aij表示第i辆车的与其对应的第k+1个地磁传感器第j个测量时间戳的权值,j=1,2,…,j,j为车辆到达第k个地磁传感器时第k+1个地磁传感器的测量时间戳的总数;
18、步骤4.4,构建每个地磁传感器同一时刻所有车辆的预测数据和该地磁传感器的测量数据的待关联二分图模型,该模型中x节点代表车辆,y节点代表地磁传感器的测量时间戳,待关联二分图中的任意一条边满足下式:
19、w(xi,yj)<=l(xi)+l(yj)
20、其中,w(xi,yj)为第k+1个地磁传感器的待关联二分图模型中第i辆车的节点xi与第j个测量时间戳的yj节点之间的边,其权重值等于aij,l(xi)为待关联二分图模型中节点xi的节点值,l(yj)为待关联二分图模型中节点yj的节点值;
21、步骤5,使用低计算复杂度的km算法对每个待关联二分图模型中的节点进行关联:
22、步骤5.1,在待关联二分图中选取所有的x节点中一个未匹配过的节点;
23、步骤5.2,判断是否搜索到所选节点的增广路径,若是,则所选节点匹配成功执行步骤5.1,否则,执行步骤5.3;
24、步骤5.3,判断待关联二分图是否达到最大匹配条件,若是,则完成了二分图的关联,得到关联后的二分图,执行步骤5.5,否则,执行步骤5.4;
25、步骤5.4,修改所有增广路径上节点的节点值:将所有增广路上当前的l(xi)减去一个常数ε,所有当前增广路上的l(yj)都加上一个常数ε后执行5.1步骤,ε=min(l(xi)+l(yj)-w(i,j));
26、步骤5.5,将已关联二分图中每个形成增广路的x节点,用第k+1个地磁传感器的坐标位置更新其对应车辆的用更新其对应车辆的为第i辆车经过第k+1个地磁传感器时的速度;
27、步骤5.6,将已关联二分图中每个未形成增广路的x节点,用第k+1个地磁传感器的坐标位置更新该未形成增广路的x节点对应车辆的用更新该未形成增广路的x节点对应车辆的
28、步骤5.7,将已关联二分图中每个未形成增广路的y节点加入到下一个待关联二分图的x中,将y对应地磁传感器的坐标位置更新为x对应车辆的用单车道允许的最大速度的二分之一,更新x对应车辆的完成已关联二分图模型中对应车辆的状态更新;
29、步骤5.8,判断是否还存在未关联的二分图,若是,则将该二分图作为待关联二分图后执行步骤5.1,否则,执行步骤6;
30、步骤6,计算设备将单车道上的所有状态更新后的车辆轨迹信息传输给智能交通云平台。
31、本发明与现有技术相比具有以下优点:
32、第1,由于本发明使用的地磁传感器的部署不受场景限制,且成本较低,检测不受环境影响,功耗更低,安装方便,克服了现有技术使用摄像机或者雷达传感器需要安装在龙门架上,难以大规模部署,成本较高,且检测精度受天气影响的问题,使得本发明能够大规模部署,且在低成本和不受环境的影响下实现单车道车辆的轨迹关联。
33、第2,由于本发明选用同一型号的地磁传感器,采用gps授时技术对所有地磁传感器进行统一授时,克服了现有技术中使用不同传感器对时时钟可能出现偏差的问题;使得本发明可以正确的获得单车道上车辆的检测信息,提高单车道车辆轨迹关联的准确度。
34、第3,由于本发明使用了低计算复杂度的km算法对每个待关联二分图模型中的节点进行关联,算法效率较高,不会给计算设备带来计算压力;克服了现有技术中车辆轨迹关联算法复杂,效率较低的问题,使得本发明能够实现单车道车辆轨迹的实时关联,获得准确的单车道车辆轨迹信息。
- 还没有人留言评论。精彩留言会获得点赞!