一种自动驾驶车辆的遥控装置的制作方法
1.本技术涉及遥控相关技术领域,尤其是涉及一种自动驾驶车辆的遥控装置。
背景技术:
2.针对现在发达的科技背景下,衍生了很多遥控器系统以及遥控装置,并用于各个行业。在现如今的农业生产过程中,机械化生产正逐渐取代人工作业,在机械化生产的过程中也引入了越来越多的机械设备,例如自动驾驶拖拉机以及具有升降功能的农具等,而这些设备均需要配置相应的遥控装置。
3.但是,现如今对于自动驾驶拖拉机以及升降功能的农具的远程控制,通常采用的方法为为每个设备配置一个独立的遥控装置,其中有些遥控装置为安装于某处的固定遥控装置。而当需要同时控制多种设备时,就需要多人工作,这样也就存在人工投入成本高的问题。因此,在现如今的智能化农业生产过程中急需一款可控制多设备的遥控装置。
技术实现要素:
4.有鉴于此,本技术的目的在于提供一种自动驾驶车辆的遥控装置,通过本技术中的遥控装置,可由一人同时控制车辆自动驾驶和农具的升降,从而降低人工成本以及提高作业效率。
5.本技术实施例提供了一种自动驾驶车辆的遥控装置,所述遥控装置包括usb供电电路、充电管理电路、充电电池、电源总开关电路、电压采集电路、降压电路、控制电路、无线收发电路、配对信号传输接口电路、程序传输接口电路、自动驾驶按键电路、升降按键电路以及状态指示灯电路;
6.所述usb供电电路的输出端连接于所述充电管理电路的第一输入端;所述充电管理电路的第一输出端连接于所述充电电池的输入端,所述充电管理电路的第二输出端连接于所述控制电路的第一输入端;所述充电电池的输出端连接于所述电源总开关电路的输入端,所述电源总开关电路的输出端分别连接于所述电压采集电路的输入端以及所述降压电路的输入端,所述电压采集电路的输出端连接于所述控制电路的第二输入端,所述降压电路的输出端分别连接于所述自动驾驶按键电路的输入端、所述充电管理电路的第二输入端、所述无线收发电路的输入端、所述升降按键电路的输入端、所述状态指示灯电路的第一输入端、所述程序传输接口电路的输入端以及所述控制电路的第三输入端,所述自动驾驶按键电路的输出端连接于所述控制电路的第四输入端,所述升降按键电路的输出端连接于所述控制电路的第五输入端,所述控制电路的输出端连接于所述状态指示灯电路的第二输入端,所述控制电路的第一交互端连接于所述无线收发电路的交互端,所述控制电路的第二交互端连接于所述配对信号传输接口电路的交互端连,所述控制电路的第三交互端连接于所述程序传输接口电路的交互端。
7.可选的,所述usb供电电路包括第一连接器、电源管理芯片、输入端协议芯片、瞬态抑制二极管、第一静电二极管、第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电
阻、第一电容、第二电容以及保险丝;
8.所述第一连接器的第一至第四引脚互连并接地;
9.所述第一连接器的第五引脚连接于所述第一连接器第六引脚、所述电源管理芯片的第一至第四引脚以及所述输入端协议芯片的第二引脚,连接处设置有所述usb供电电路的输入端的接口;
10.所述第一连接器的第七引脚连接于所述第一电阻的一端和所述第二电阻的一端,所述第一电阻的另一端接地,所述第二电阻的另一端连接于所述输入端协议芯片的第五引脚;
11.所述第一连接器的第八引脚连接于所述第三电阻的一端和所述第四电阻的一端,所述第三电阻的另一端接地,所述第四电阻的另一端连接于所述输入端协议芯片的第六引脚;
12.所述第一连接器的第九引脚和第十引脚互连并接地;
13.所述电源管理芯片的第五引脚连接于所述电源管理芯片的第六引脚、所述电源管理芯片的第七引脚、所述输入端协议芯片的第四引脚、所述第一电容的一端、所述瞬态抑制二极管的一端、所述第一静电二极管的负极以及所述保险丝的一端,所述保险丝的另一端连接于所述第二电容的一端,中间设置有所述usb供电电路的输出端的接口;
14.所述电源管理芯片的第八引脚连接于所述第六电阻的一端,所述第六电阻的另一端连接于所述输入端协议芯片的第一引脚,所述输入端协议芯片的第七引脚连接于所述第五电阻的一端;
15.所述第一电容的另一端、所述瞬态抑制二极管的另一端、所述第一静电二极管的正极、所述第二电容的另一端、所述输入端协议芯片的第三引脚以及所述第五电阻的另一端均接地。
16.可选的,所述充电管理电路包括:电池充电管理芯片、第七电阻、第八电阻、第九电阻、第十电阻、第十一电阻、第三电容以及第四电容;
17.所述电池充电管理芯片的第一引脚连接于所述第三电容的一端,中间设置有所述充电管理电路的第一输入端的接口,所述第三电容的另一端接地;
18.所述电池充电管理芯片的第二引脚连接于所述第七电阻的一端,所述第七电阻的另一端接地;
19.所述电池充电管理芯片的第三引脚连接于所述第八电阻的一端,所述第八电阻的另一端接地;
20.所述电池充电管理芯片的第四引脚接地;
21.所述电池充电管理芯片的第五引脚连接于所述第九电阻的一端,所述第九电阻的另一端接地;
22.所述电池充电管理芯片的第六引脚连接于所述第四电容的一端,中间设置有所述充电管理电路的第一输出端的接口,所述第四电容的另一端接地;
23.所述电池充电管理芯片的第七引脚连接于所述第十电阻的一端,中间设置有所述充电管理电路的第二输出端的第一接口;
24.所述电池充电管理芯片的第八引脚连接于所述第十一电阻的一端,中间设置有所述充电管理电路的第二输出端的第二接口;
25.所述第十电阻的另一端和所述第十一电阻的另一端连接,中间设置有所述充电管理电路的第二输入端的接口;
26.所述电池充电管理芯片的九引脚接地。
27.可选的,所述充电电池为锂电池。
28.可选的,所述电压采集电路包括:第十二电阻、第十三电阻、第十四电阻、第五电容以及第二静电二极管;
29.所述第十二电阻的一端连接于所述第十三电阻的一端、所述第二静电二极管的一端以及所述第十四电阻的一端;所述第十二电阻的另一端为所述电压采集电路的输入端的接口;所述第十三电阻的另一端连接于所述第五电容的一端,中间设置有所述电压采集电路的输出端的接口;所述第十四电阻的另一端、所述第二静电二极管的另一端以及所述第五电容的另一端均接地。
30.可选的,所述降压电路包括降压芯片、第六电容、第七电容、第八电容、第九电容、第一电感、第十五电阻以及第十六电阻;
31.所述降压芯片的第一引脚连接于所述第六电容的一端以及所降压芯片的第三引脚,连接处设置有所述降压电路的输入端的接口;
32.所述降压芯片的第四引脚连接于所述第一电感的一端,所述第一电感的另一端连接于所述第七电容的一端、所述第十五电阻的一端以及所述第八电容的一端,所述第十五电阻与所述第八电容中间设置有所述降压电路的输出端的接口;
33.所述第七电容的另一端连接于所述第九电容的一端、所述降压芯片的第五引脚、所述第十五电阻的另一端以及所述第十六电阻的一端;
34.所述第六电容的一端、所述降压芯片的第二引脚、所述第九电容的另一端、所述第十六电阻的另一端以及所述第八电容的另一端均接地。
35.可选的,所述控制电路包括:单片机、晶体振荡器、第十七电阻、第十八电阻、第十电容、第十一电容以及第十二电容;
36.所述单片机的第十八引脚为所述控制电路的第一输入端的第一接口,所述单片机的第十四引脚为所述控制电路的第一输入端的第二接口;
37.所述单片机的第一引脚为所述控制电路的第二输入端的接口;
38.所述单片机的第三十七至四十引脚互连,连接处设置有所述控制电路的第三输入端的接口;
39.所述单片机的第三十引脚为所述控制电路的输出端的第一接口,所述单片机的第二十三引脚为所述控制电路的输出端的第二接口,所述单片机的第三十二引脚为所述控制电路的输出端的第三接口,所述单片机的第三十一引脚为所述控制电路的输出端的第四接口,所述单片机的第二十二引脚为所述控制电路的输出端的第五接口,所述单片机的第二十一引脚为所述控制电路的输出端的第六接口,所述单片机的第二十引脚为所述控制电路的输出端的第七接口,所述单片机的第十九引脚为所述控制电路的输出端的第八接口,所述单片机的第二十七引脚为所述控制电路的输出端的第九接口,所述单片机的第二十九引脚为所述控制电路的输出端的第十接口,所述单片机的第二十八引脚为所述控制电路的输出端的第十一接口,所述单片机的第九引脚为所述控制电路的输出端的第十二接口;
40.所述单片机的第六引脚为所述控制电路的第一交互端的第一接口,所述单片机的
第五引脚为所述控制电路的第一交互端的第二接口,所述单片机的第三引脚为所述控制电路的第一交互端的第三接口,所述单片机的第四引脚为所述控制电路的第一交互端的第四接口,所述单片机的第七引脚为所述控制电路的第一交互端的第五接口;
41.所述单片机的第十引脚为所述控制电路的第二交互端的第一接口,所述单片机的第十一引脚为所述控制电路的第二交互端的第二接口;
42.所述单片机的第十三引脚为所述控制电路的第三交互端的第一接口,所述单片机的第十二引脚为所述控制电路的第三交互端的第二接口,所述单片机的第十七引脚为所述控制电路的第三交互端的第三接口,所述单片机的第三十四引脚与所述第十七电阻的一端以及所述第十电容的一端连接,中间设置有所述控制电路的第三交互端的第四接口,所述第十七电阻的另一端为所述控制电路的第三输入端的接口,所述第十电容的另一端接地;
43.所述单片机的第三十五引脚、所述第十八电阻的一端、所述晶体振荡器的第一端以及所述第十一电容的一端互相连接,所述第十一电容的另一端接地;
44.所述单片机的第三十六引脚、所述第十八电阻的另一端、所述晶体振荡器的第二端以及所述第十二电容的一端互相连接,所述第十二电容的另一端接地,所述晶体振荡器的第三端接地;
45.所述单片机的第四十一至四十三引脚互连并接地。
46.可选的,所述控制电路中还包括供电子电路、启动电路以及滤波电路;
47.所述供电子电路中包括:第二电感、第三电感、第十三电容以及第十四电容;
48.所述第二电感的一端连接于所述第十三电容的一端,中间设置有所述控制电路的第三输入端的接口;所述第二电感的另一端、所述第十四电容的一端以及所述单片机的第四十四引脚互相连接;所述第十四电容的另一端、所述单片机的第四十五引脚以及所述第三电感的一端互相连接;所述第十三电容的另一端与所述第三电感的另一端互连并接地;
49.所述启动电路包括:第十九电阻和第二十电阻;
50.所述第十九电阻的一端连接于所述单片机的第十六引脚,所述十九电阻的另一端为所述控制电路的第三输入端的接口;所述第二十电阻的一端连接于所述单片机的第三十三引脚,所述第二十电阻的另一端接地;
51.所述滤波电路包括:第十五电容、第十六电容以及第十七电容;
52.所述第十五电容的一端、所述第十六电容的一端以及第十七电容的一端连接,连接处设置有所述控制电路的第三输入端的接口;所述第十五电容的另一端、所述第十六电容的另一端以及第十七电容的另一端均接地。
53.可选的,所述无线收发电路包括:无线通信模块;
54.所述无线通信模块的第一至第四引脚以及第十一至十五引脚均接地;
55.所述无线通信模块的第五引脚为所述无线收发电路的交互端的第一接口,所述无线通信模块的第六引脚为所述无线收发电路的交互端的第二接口,所述无线通信模块的第七引脚为所述无线收发电路的交互端的第三接口,所述无线通信模块的第八引脚为所述无线收发电路的交互端的第四接口,所述无线通信模块的第九引脚为所述无线收发电路的交互端的第五接口,所述无线通信模块的第十引脚为所述无线收发电路的输入端的接口。
56.可选的,所述配对信号传输接口电路包括第二连接器,所述第二连接器的第一引脚为所述配对信号传输接口电路的交互端的第一接口,所述第二连接器的第二引脚为所述
配对信号传输接口电路的交互端的第二接口,所述第二连接器的第三引脚接地。
57.可选的,所述程序传输接口电路包括:第三连接器、第二十一电阻、第二十二电阻、第二十三电阻以及第二十四电阻;
58.所述第三连接器的第一引脚连接于所述第二十一电阻的一端,中间设置有所述程序传输接口电路的交互端的第一接口,所述第二十一电阻的另一端接地;
59.所述第三连接器的第二引脚连接于所述第二十二电阻的一端,中间设置有所述程序传输接口电路的交互端的第二接口;
60.所述第三连接器的第三引脚连接于所述第二十三电阻的一端,中间设置有所述程序传输接口电路的交互端的第三接口,所述二十二电阻的另一端连接于所述第二十三电阻的另一端,中间设置有所述程序传输接口电路的输入端的接口;
61.所述第三连接器的第四引脚为所述程序传输接口电路的交互端的第四接口;
62.所述第三连接器的第五引脚连接于所述第二十四电阻的一端,所述第二十四电阻的另一端为所述程序传输接口电路的输入端的接口;
63.所述第三连接器的第六引脚接地。
64.可选的,所述自动驾驶按键电路包括前进按键电路和停止按键电路。
65.可选的,所述升降按键电路包括上升按键电路、下降按键电路、第一自定义按键电路以及第二自定义按键电路。
66.可选的,所述状态指示灯电路包括:前进指示灯电路、停止指示灯电路、电量指示灯电路、网络指示灯电路、按键指示灯电路以及故障指示灯电路。
67.这样,通过本技术中的遥控装置,可由一人同时控制车辆自动驾驶和农具的升降,从而降低人工投入以及提高作业效率。并且,通过在遥控装置中添加有降压电路,可以给控制电路提供稳定的电源,使得遥控装置持续稳定工作。而使用lora无线模块,使得可以发送的无线信号具有穿透性强以及传输距离远的优点。再者通过采用低功耗单片机,可以降低遥控装置的耗电情况,从而可以增长遥控装置的使用时间,不用频繁充电。
68.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
69.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
70.图1为本技术实施例所提供的一种自动驾驶车辆的遥控装置的结构示意图;
71.图2为本技术实施例所提供的遥控装置的外观示意图;
72.图3为本技术实施例所提供的被控制拖拉机的结构示意图;
73.图4为本技术实施例中所述提供的usb供电电路的电路图;
74.图5为本技术实施例中所述提供的充电管理电路的电路图;
75.图6为本技术实施例中所述提供的电压采集电路的电路图;
76.图7为本技术实施例中所述提供的降压电路的电路图;
77.图8为本技术实施例中所述提供的控制电路的电路图之一;
78.图9为本技术实施例中所述提供的控制电路的电路图之二;
79.图10为本技术实施例中所述提供的无线收发电路的电路图;
80.图11为本技术实施例中所述提供的配对信号传输接口电路的电路图;
81.图12为本技术实施例中所述提供的程序传输接口电路的电路图;
82.图13为本技术实施例中所述提供的前进按键电路的电路图;
83.图14为本技术实施例中所述提供的前进指示灯电路的电路图。
具体实施方式
84.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的每个其他实施例,都属于本技术保护的范围。
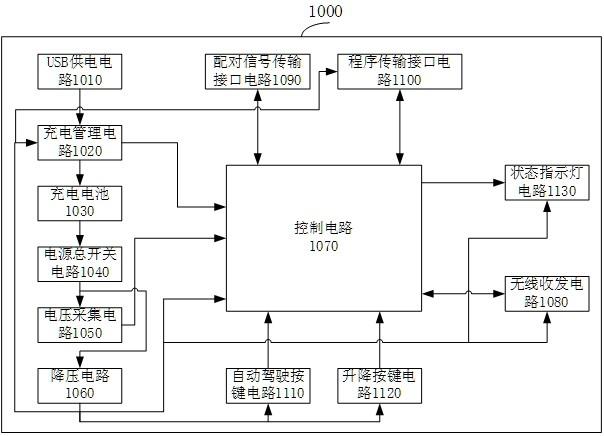
85.请参阅图1,图1为本技术实施例所提供的一种自动驾驶车辆的遥控装置的结构示意图。如图1中所示,所述遥控装置1000包括usb供电电路1010、充电管理电路1020、充电电池1030、电源总开关电路1040、电压采集电路1050、降压电路1060、控制电路1070、无线收发电路1080、配对信号传输接口电路1090、程序传输接口电路1100、自动驾驶按键电路1110、升降按键电路1120以及状态指示灯电路1130。
86.所述usb供电电路1010的输出端连接于所述充电管理电路1020的第一输入端;所述充电管理电路1020的第一输出端连接于所述充电电池1030的输入端,所述充电管理电路1020的第二输出端连接于所述控制电路1070的第一输入端;所述充电电池1030的输出端连接于所述电源总开关电路1040的输入端,所述电源总开关电路1040的输出端分别连接于所述电压采集电路1050的输入端以及所述降压电路1060的输入端,所述电压采集电路1050的输出端连接于所述控制电路1070的第二输入端,所述降压电路1060的输出端分别连接于所述自动驾驶按键电路1110的输入端、所述充电管理电路1020的第二输入端、所述无线收发电路1080的输入端、所述升降按键电路1120的输入端、所述状态指示灯电路1130的第一输入端、所述程序传输接口电路1100的输入端以及所述控制电路1070的第三输入端,所述自动驾驶按键电路1110的输出端连接于所述控制电路1070的第四输入端,所述升降按键电路1120的输出端连接于所述控制电路1070的第五输入端,所述控制电路1070的输出端连接于所述状态指示灯电路1130的第二输入端,所述控制电路1070的第一交互端连接于所述无线收发电路1080的交互端,所述控制电路1070的第二交互端连接于所述配对信号传输接口电路1090的交互端连,所述控制电路1070的第三交互端连接于所述程序传输接口电路1100的交互端。
87.这里,所述usb供电电路中的输入端采用usb type-c接口,通过该电路为所述充电电池1030充电。所述充电电池1030选择宽温域锂电池,具有充放电功能,为所述遥控装置1000提供稳定电源。所述电源总开关电路1040控制所述遥控装置1000的开启和闭合,在不
使用手遥控装置1000的情况下,可以关闭电源总开关,这样遥控装置1000就不会产生耗电。其中,在本方案中选择的开关按钮为旋转按钮。
88.需要说明的是,所述充电电池1030通过型号为xh2.54-2p的连接器与所述充电管理电路1020的第一输出端连接,该连接器直接与所述充电电池的正极相连,当所述充电电池正常工作时,所述充电电池的正极为输出端,当所述充电电池充电时,所述充电电池的正极为输入端。
89.示例的,请参阅图2,图2为本技术实施例所提供的遥控装置的外观示意图。如图2中所示,包括外壳、状态指示灯、自动驾驶按键、升降按键以及旋转按钮,遥控装置1000的电路板以及电路板中的器件设置于外壳10内。状态指示灯包括电量指示灯110,按键指示灯111,网络指示灯112、故障指示灯113、前进指示灯114以及停止指示灯115,每种指示灯可显示三种颜色,绿灯代表正常,黄灯代表异常,红灯代表故障。自动驾驶按键包括前进按键120和停止按键121,当操作120时,可控制被控制车辆按预先设置好的行驶路线前进;当操作121时,可控制被控制车辆停止行动。升降按键包括上升按键130、下降按键131、第一自定义按键132以及第二自定义按键133。其中上升按键130可用于控制目标农具上升,下降按键131可用于控制目标农具下降,第一自定义按键132以及第二自定义按键133可自行配置,例如,配置第一自定义按键132为用于控制车辆打开动力输出轴的按键,配置第二自定义按键133为用于控制车辆关闭动力输出轴的按键。14为遥控装置1000中的电源总开关的旋转按钮。
90.需要说明的是,当所述遥控装置1000用于控制自动驾驶拖拉机时,应用的场景为农业场景,而在该场景中灰尘比较大,所述遥控装置1000的外壳10需做防水防尘处理。
91.本方案中的遥控装置1000需要和自动驾驶车辆配合工作,示例的,假设本方案中的遥控器用于控制的自动驾驶车辆为拖拉机时,请参阅图3,图3为本技术实施例所提供的被控制拖拉机的结构示意图。如图3所示,包括拖拉机的本体30,收发天线31、拖拉机控制器32以及拖拉机底盘33。所述收发天线31安装在拖拉机的指定位置处,该指定位置利于无线信号的传输和接收。所述收发天线31与所述拖拉机控制器32连接,所述拖拉机控制器32通过can总线与所述拖拉机底盘33连接。所述遥控装置1000和所述被控制拖拉机通过无线通信连接。
92.这里,拖拉机控制器32中包括有无线收发单元,用于接收手持遥控器发送的前进/停止指令等,或者传输被控制拖拉机自身的状态信息到遥控装置1000中显示;拖拉机底盘33用于控制和接收车辆的方向、档位、刹车信息等。
93.进一步的,请参阅图4,图4为本技术实施例中所述提供的usb供电电路的电路图。如图4所示,所述usb供电电路包括第一连接器j1、电源管理芯片u1、输入端协议芯片u2、瞬态抑制二极管d1、第一静电二极管d2、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第五电阻r5、第六电阻r6、第一电容c1、第二电容c2以及保险丝f;
94.所述第一连接器j1的第一引脚1至第四引脚4互连并接地;
95.所述第一连接器j1的第五引脚5连接于所述第一连接器j1第六引脚6、所述电源管理芯片u1的第一引脚1至第四引脚4以及所述输入端协议芯片u2的第二引脚2,连接处设置有所述usb供电电路1010的输入端的接口;
96.所述第一连接器j1的第七引脚7连接于所述第一电阻r1的一端和所述第二电阻r2
的一端,所述第一电阻r1的另一端接地,所述第二电阻r2的另一端连接于所述输入端协议芯片u2的第五引脚5;
97.所述第一连接器j1的第八引脚8连接于所述第三电阻r3的一端和所述第四电阻r4的一端,所述第三电阻r3的另一端接地,所述第四电阻r4的另一端连接于所述输入端协议芯片u2的第六引脚6;
98.所述第一连接器j1的第九引脚9和第十引脚10互连并接地;
99.所述电源管理芯片u1的第五引脚5连接于所述电源管理芯片u1的第六引脚6、所述电源管理芯片u1的第七引脚7、所述输入端协议芯片u2的第四引脚4、所述第一电容c1的一端、所述瞬态抑制二极管d1的一端、所述第一静电二极管d2的负极以及所述保险丝f的一端,所述保险丝f的另一端连接于所述第二电容c2的一端,中间设置有所述usb供电电路1010的输出端的接口;
100.所述电源管理芯片u1的第八引脚8连接于所述第六电阻r6的一端,所述第六电阻r6的另一端连接于所述输入端协议芯片u2的第一引脚1,所述输入端协议芯片u2的第七引脚7连接于所述第五电阻r5的一端;
101.所述第一电容c1的另一端、所述瞬态抑制二极管d1的另一端、所述第一静电二极管d2的正极、所述第二电容c2的另一端、所述输入端协议芯片u2的第三引脚3以及所述第五电阻r5的另一端均接地。
102.在所述usb供电电路1010中,所述第一连接器j1可采用type-c-31-m-12型号的usb type-c连接器,用于连接充电器。所述电源管理芯片u1可采用si4842dy型号的mos管,配合输入端协议芯片u2使用,用于接通type-c的供电到充电电路上。所述输入端协议芯片u2可采用ip2721型号的协议芯片,是一款集成usb typec 输入端口pd 快慢充的协议芯片。所述瞬态抑制二极管d1可采用smaj5.0a型号的二极管,用于限压保护电路。所述第一静电二极管d2可采用tesd05eb型号的二极管,用于防止静电干扰。所述保险丝f用于当电路出现故障导致电流过大时,保护充电器和电池。
103.进一步的,请参阅图5,图5为本技术实施例中所述提供的充电管理电路的电路图。所述充电管理电路1020包括:电池充电管理芯片u3、第七电阻r7、第八电阻r8、第九电阻r9、第十电阻r10、第十一电阻r11、第三电容c3以及第四电容c4;
104.所述电池充电管理芯片u3的第一引脚1连接于所述第三电容c3的一端,中间设置有所述充电管理电路的第一输入端的接口,所述第三电容c3的另一端接地;
105.所述电池充电管理芯片u3的第二引脚2连接于所述第七电阻r7的一端,所述第七电阻r7的另一端接地;
106.所述电池充电管理芯片u3的第三引脚3连接于所述第八电阻r8的一端,所述第八电阻r8的另一端接地;
107.所述电池充电管理芯片u3的第四引脚4接地;
108.所述电池充电管理芯片u3的第五引脚5连接于所述第九电阻r9的一端,所述第九电阻r9的另一端接地;
109.所述电池充电管理芯片u3的第六引脚6连接于所述第四电容c4的一端,中间设置有所述充电管理电路的第一输出端的接口,所述第四电容c4的另一端接地;
110.所述电池充电管理芯片u3的第七引脚7连接于所述第十电阻r10的一端,中间设置
有所述充电管理电路的第二输出端的第一接口;
111.所述电池充电管理芯片u3的第八引脚8连接于所述第十一电阻r11的一端,中间设置有所述充电管理电路的第二输出端的第二接口;
112.所述第十电阻r10的另一端和所述第十一电阻r11的另一端连接,中间设置有所述充电管理电路的第二输入端的接口;
113.所述电池充电管理芯片u3的第九引脚9接地。
114.这里,所述电池充电管理芯片u3可采用型号rt9526age的芯片,用于给所述充电电池充电,所述充电电池为锂电池。其中所述充电管理电路1020通过电池接插件与所述充电电池连接,可采用型号为xh2.54-2p的接插件。
115.进一步的,请参阅图6,图6为本技术实施例中所述提供的电压采集电路的电路图。如图6中所示,所述电压采集电路1050包括:第十二电阻r12、第十三电阻r13、第十四电阻r14、第五电容c5以及第二静电二极管d3;
116.所述第十二电阻r12的一端连接于所述第十三电阻r13的一端、所述第二静电二极管d3的一端以及所述第十四电阻r14的一端;所述第十二电阻r12的另一端为所述电压采集电路的输入端的接口;所述第十三电阻r13的另一端连接于所述第五电容c5的一端,中间设置有所述电压采集电路的输出端的接口;所述第十四电阻r14的另一端、所述第二静电二极管d3的另一端以及所述第五电容c5的另一端均接地。
117.这里,所述第二静电二极管d3可采用型号为tesd05eb的二极管,用于防止静电。所述电压采集电路的输入端的接口通过接连器与旋转开关按钮连接。其中,所述接连器可采用型号为xh2.54-2p的连接器。
118.进一步的,请参阅图7,图7为本技术实施例中所述提供的降压电路的电路图。如图7中所示,所述降压电路1060包括降压芯片u4、第六电容c6、第七电容c7、第八电容c8、第九电容c9、第一电感l1、第十五电阻r15以及第十六电阻r16;
119.所述降压芯片u4的第一引脚1连接于所述第六电容c6的一端以及所降压芯片u4的第三引脚3,连接处设置有所述降压电路的输入端的接口;
120.所述降压芯片u4的第四引脚4连接于所述第一电感l1的一端,所述第一电感l1的另一端连接于所述第七电容c7的一端、所述第十五电阻r15的一端以及所述第八电容c8的一端,所述第十五电阻r15与所述第八电容c8中间设置有所述降压电路的输出端的接口;
121.所述第七电容c7的另一端连接于所述第九电容c9的一端、所述降压芯片u4的第五引脚5、所述第十五电阻r15的另一端以及所述第十六电阻r16的一端;
122.所述第六电容c6的一端、所述降压芯片u4的第二引脚2、所述第九电容c9的另一端、所述第十六电阻r16的另一端以及所述第八电容c8的另一端均接地。
123.这里,所述降压芯片可采用型号为lm3671mf-adj,用于降压,可将充电电池的4.2v电压降至3.3v,给控制电路、无线收发电路等供电。需要说明的是,本技术的方案中之所以添加降压电路是因为,控制电路的供电范围比较窄,充电电池在充满电时,电压超过控制电路的供电范围,降压电路可以提供一个稳定的并且符合要求的电压输出。
124.进一步的,请参阅图8,图8为本技术实施例中所述提供的控制电路的电路图之一。如图8中所示,所述控制电路包括:单片机u5、晶体振荡器x、第十七电阻r17、第十八电阻r18、第十电容c10、第十一电容c11以及第十二电容c12;
125.所述单片机u5的第十八引脚18为所述控制电路的第一输入端的第一接口,所述单片机u5的第十四引脚14为所述控制电路的第一输入端的第二接口;
126.所述单片机u5的第一引脚1为所述控制电路的第二输入端的接口;
127.所述单片机u5的第三十七引脚37至第四十引脚40互连,连接处设置有所述控制电路的第三输入端的接口;
128.所述单片机u5的第三十引脚20为所述控制电路1070的输出端的第一接口,所述单片机u5的第二十三引脚23为所述控制电路1070的输出端的第二接口,所述单片机u5的第三十二引脚32为所述控制电路1070的输出端的第三接口,所述单片机u5的第三十一引脚31为所述控制电路1070的输出端的第四接口,所述单片机u5的第二十二引脚22为所述控制电路1070的输出端的第五接口,所述单片机u5的第二十一引脚21为所述控制电路1070的输出端的第六接口,所述单片机u5的第二十引脚20为所述控制电路1070的输出端的第七接口,所述单片机u5的第十九引脚19为所述控制电路1070的输出端的第八接口,所述单片机u5的第二十七引脚27为所述控制电路1070的输出端的第九接口,所述单片机u5的第二十九引脚29为所述控制电路1070的输出端的第十接口,所述单片机u5的第二十八引脚28为所述控制电路1070的输出端的第十一接口,所述单片机u5的第九引脚9为所述控制电路1070的输出端的第十二接口;
129.所述单片机u5的第六引脚6为所述控制电路1070的第一交互端的第一接口,所述单片机u5的第五引脚5为所述控制电路1070的第一交互端的第二接口,所述单片机u5的第三引脚3为所述控制电路1070的第一交互端的第三接口,所述单片机u5的第四引脚4为所述控制电路1070的第一交互端的第四接口,所述单片机u5的第七引脚7为所述控制电路1070的第一交互端的第五接口;
130.所述单片机u5的第十引脚10为所述控制电路1070的第二交互端的第一接口,所述单片机u5的第十一引脚11为所述控制电路1070的第二交互端的第二接口;
131.所述单片机u5的第十三引脚13为所述控制电路1070的第三交互端的第一接口,所述单片机u5的第十二引脚12为所述控制电路1070的第三交互端的第二接口,所述单片机u5的第十七引脚17为所述控制电路1070的第三交互端的第三接口,所述单片机u5的第三十四引脚34与所述第十七电阻r17的一端以及所述第十电容c10的一端连接,中间设置有所述控制电路1070的第三交互端的第四接口,所述第十七电阻r17的另一端为所述控制电路1070的第三输入端的接口,所述第十电容c10的另一端接地;
132.所述单片机u5的第三十五引脚35、所述第十八电阻r18的一端、所述晶体振荡器x的第一端以及所述第十一电容c11的一端互相连接,所述第十一电容c11的另一端接地;
133.所述单片机u5的第三十六引脚36、所述第十八电阻r18的另一端、所述晶体振荡器x的第二端以及所述第十二电容c12的一端互相连接,所述第十二电容c12的另一端接地,所述晶体振荡器x的第三端接地;
134.所述单片机u5的第四十一引脚41至第四十三引脚43互连并接地。
135.这里,所述单片机可采用超低功耗单片机stm32f103,所述单片机用于电量计算、按键信息接收、控制指示灯显示以及控制无线收发等。
136.进一步的,请参阅图9,图9为本技术实施例中所述提供的控制电路的电路图之二。如图9中所示,所述控制电路1070中还包括供电子电路ⅰ、启动电路ⅱ以及滤波电路ⅲ;
137.所述供电子电路ⅰ中包括:第二电感l2、第三电感l3、第十三电容c13以及第十四电容c14;
138.所述第二电感l2的一端连接于所述第十三电容c13的一端,中间设置有所述控制电路1070的第三输入端的接口;所述第二电感l2的另一端、所述第十四电容c14的一端以及所述单片机u5的第四十四引脚44互相连接;所述第十四电容c14的另一端、所述单片机u5的第四十五引脚45以及所述第三电感l3的一端互相连接;所述第十三电容c13的另一端与所述第三电感l3的另一端互连并接地;
139.所述启动电路ⅱ包括:第十九电阻r19和第二十电阻r20;
140.所述第十九电阻r19的一端连接于所述单片机u5的第十六引脚16,所述十九电阻r19的另一端为所述控制电路1070的第三输入端的接口;所述第二十电阻r20的一端连接于所述单片机u5的第三十三引脚33,所述第二十电阻r20的另一端接地;
141.所述滤波电路ⅲ包括:第十五电容c15、第十六电容c16以及第十七电容c17;
142.所述第十五电容c15的一端、所述第十六电容c16的一端以及第十七电容c17的一端连接,连接处设置有所述控制电路1070的第三输入端的接口;所述第十五电容c15的另一端、所述第十六电容c16的另一端以及第十七电容c17的另一端均接地。
143.这里,所述供电子电路用于给所述控制电路的模数转换电路部分提供电源。所述启动电路用于配置所述控制电路的启动模式。所述滤波电路可用于给所述控制电路提供更稳定的电源输入。
144.进一步的,请参阅图10,图10为本技术实施例中所述提供的无线收发电路的电路图。如图10所示,所述无线收发电路1080包括:无线通信模块u6;
145.所述无线通信模块u6的第一引脚1至第四引脚4以及第十一引脚11至第十五引脚15均接地;
146.所述无线通信模块u6的第五引脚5为所述无线收发电路1080的交互端的第一接口,所述无线通信模块u6的第六引脚6为所述无线收发电路1080的交互端的第二接口,所述无线通信模块u6的第七引脚7为所述无线收发电路1080的交互端的第三接口,所述无线通信模块u6的第八引脚8为所述无线收发电路1080的交互端的第四接口,所述无线通信模块u6的第九引脚9为所述无线收发电路1080的交互端的第五接口,所述无线通信模块u6的第十引脚10为所述无线收发电路1080的输入端的接口。
147.这里,所述无线通信模块为lora无线模块,所述lora无线模块可采用型号为e22-400t22s的模块,工作频率为410-525mhz,具有超低功率、超远距离传输、低速通信特点,很适宜在低速自动驾驶使用。其中无线模块可以通过串口连接控制电路中的单片机。
148.进一步的,请参阅图11,图11为本技术实施例中所述提供的配对信号传输接口电路的电路图。如图11所示,所述配对信号传输接口电路1090包括第二连接器j2,所述第二连接器j2的第一引脚1为所述配对信号传输接口电路的交互端的第一接口,所述第二连接器j2的第二引脚2为所述配对信号传输接口电路的交互端的第二接口,所述第二连接器j2的第三引脚3接地。
149.需要说明的是,遥控装置要配合接收器使用,本技术中的遥控装置在在刚刚完成组装时,里面没有配置信息,所有的遥控器和所有的接收机都能互相通信,这样是不满足实际应用场景的。因此通过配对信号传输接口电路,传输配对信号,使得一个遥控装置对应唯
一一个接收器,实现定向通信。
150.这里,所述第二连接器可采用型号为xh2.54-3p的连接器,用于连接外界专用设备,提供配置遥控装置的功能。
151.进一步的,请参阅图12,图12为本技术实施例中所述提供的程序传输接口电路的电路图。如图12所示,所述程序传输接口电路1100包括:第三连接器j3、第二十一电阻r21、第二十二电阻r22、第二十三电阻r23以及第二十四电阻r24;
152.所述第三连接器j3的第一引脚1连接于所述第二十一电阻r21的一端,中间设置有所述程序传输接口电路的交互端的第一接口,所述第二十一电阻r21的另一端接地;
153.所述第三连接器j3的第二引脚2连接于所述第二十二电阻r22的一端,中间设置有所述程序传输接口电路的交互端的第二接口;
154.所述第三连接器j3的第三引脚3连接于所述第二十三电阻r23的一端,中间设置有所述程序传输接口电路的交互端的第三接口,所述第二十二电阻r22的另一端连接于所述第二十三电阻r23的另一端,中间设置有所述程序传输接口电路的输入端的接口;
155.所述第三连接器j3的第四引脚4为所述程序传输接口电路的交互端的第四接口;
156.所述第三连接器j3的第五引脚5连接于所述第二十四电阻r24的一端,所述第二十四电阻r24的另一端为所述程序传输接口电路的输入端的接口;
157.所述第三连接器j3的第六引脚6接地。
158.这里,所述第三连接器可采用型号为xh2.54-6p的连接器,所述程序传输接口电路可用于向所述控制电路传输程序,以供所述控制电路进行程序升级更新。
159.进一步的,所述自动驾驶按键电路1110包括前进按键电路和停止按键电路。
160.示例的,请参阅图13,图13为本技术实施例中所述提供的前进按键电路的电路图。如图13中所示,所述前进按键电路为所述自动驾驶按键电路的子电路,所述前进按键电路包括:第二十五电阻r25和前进按键sw1;
161.所述前进按键sw1的一端连接于所述第二十五电阻r25的一端,中间设置有所述自动驾驶电路1110输出端的第一接口,所述第二十五电阻r25的另一端为所述自动驾驶电路1110输入端的接口,所述前进按键sw1的另一端接地。
162.需要说明的是,所述停止按键电路包含的器件以及器件之间的连接方式与所述前进按键电路相似,在此不再赘述。
163.这里,所述前进按键电路用于向所述控制电路发送前进信号,所述控制电路接收到前进信号后,通过所述无线收发电路向被控制车辆发送前进指令,以供所述被控制车辆自动前进。所述停止按键电路用于向所述控制电路发送停止信号,所述控制电路接收到停止信号后,通过所述无线收发电路向被控制车辆发送停止指令,以供所述被控制车辆停止行动。
164.进一步的,所述升降按键电路1120包括上升按键电路、下降按键电路、第一自定义按键电路以及第二自定义按键电路。
165.这里,所述上升按键电路、下降按键电路、第一自定义按键电路以及第二自定义按键电路包含的器件以及器件之间的连接方式与所述前进按键电路相似,在此不再赘述。
166.这里,所述上升按键电路用于向所述控制电路发送上升信号,所述控制电路接收到上升信号后,通过所述无线收发电路向被控制农具发送上升指令,以供所述被控制农具
上升。所述下降按键电路用于向所述控制电路发送下降信号,所述控制电路接收到下降信号后,通过所述无线收发电路向被控制农具发送下降指令,以供所述被控制农具下降。
167.其中,第一自定义按键电路以及第二自定义按键电路可进行自由配置。
168.进一步的,所述状态指示灯电路包括:前进指示灯电路、停止指示灯电路、电量指示灯电路、网络指示灯电路、按键指示灯电路以及故障指示灯电路。
169.示例的,请参阅图14,图14为本技术实施例中所述提供的前进指示灯电路的电路图。如图14中所示,所述前进指示灯电路为所述状态指示灯的子电路,所述前进指示灯电路包括:第一双色发光二极管led1、第一场效应管m1、第二场效应管m2、第二十六电阻r26、第二十七电阻r27、第二十八电阻r28、第二十九电阻r29、第三十电阻r30以及第三十一电阻r31;
170.所述第一双色发光二极管led1的第一阴极连接于所述第二十六电阻r26的一端,所述第二十六电阻r26的另一端连接于所述第一场效应管m1的漏极,所述第一双色发光二极管led1的第二阴极连接于所述第二十七电阻r27的一端,所述第二十七电阻r27的另一端连接于所述第二场效应管m2的漏极,所述第一场效应管m1的栅极、所述第三十电阻r30的一端以及所述第三十一电阻r31的一端互连,所述第三十电阻r30的另一端为所述状态指示灯电路的第二输入端的第二接口,所述第三十一电阻r31的另一端接地,所述第二场效应管m2的栅极、所述第二十八电阻r28的一端以及所述第二十九电阻r29的一端互连,所述第二十八电阻r28的另一端为所述状态指示灯电路的第二输入端的第一接口,所述第二十九电阻r29的另一端接地,所述第一场效应管m1的源极以及所述第二场效应管m2的源极均接地,所述第一双色发光二极管led1的正极为所述状态指示灯电路的第一输入端的接口。
171.需要说明的是,所述停止指示灯电路、电量指示灯电路、网络指示灯电路、按键指示灯电路以及故障指示灯电路包含的器件以及器件之间的连接方式与所述前进指示灯电路相似,在此不再赘述。
172.这样,通过本技术中的遥控装置,可由一人同时控制车辆自动驾驶和农具的升降,从而降低人工投入以及提高作业效率。并且,通过在遥控装置中添加有降压电路,可以给控制电路提供稳定的电源,使得遥控装置持续稳定工作。而使用lora无线模块,使得可以发送的无线信号具有穿透性强以及传输距离远的优点。再者,通过采用低功耗单片机,可以降低遥控装置的耗电情况,从而可以增长遥控装置的使用时间,不用频繁充电。
173.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本实用新型的范围之内并且形成不同的实施例。例如,在上面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。公开于该背景技术部分的信息仅仅旨在加深对本实用新型的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1