一种用于巡逻机器人的人员入侵检测系统的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种用于巡逻机器人的人员入侵检测系统。
背景技术:
2.rfid无线射频识别是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据,识别工作无需人工干预,可工作于各种恶劣环境。目前在一些指定场所中,人员验证的方法包括被动式的人工登记与主动式的设备登记,其中被动式的人工登记,从入门开始的一系列人员验证,签字,登记等流程。这些流程耗时耗人工,成本较高,并且环节繁多,极为不便。主动式的设备登记,员工自己去配合一些简单指纹验证等设备做登记,这种方式容易造成员工遗忘或者带进其他不相关的人。
3.公开号为cn113780088a的中国专利公开了一种基于深度学习工业巡逻机器人针对人员入侵实时检测算法,该算法包括以下步骤:s1、通过机器人人体识别系统对外来人员进行检测,并提醒其进行身份验证;s2、利用抓拍机对验证人员进行脸部抓拍,并收集提取验证人员脸部图片;s3、将收集到的验证人员脸部图片传送至机器人内部系统;s4、采用预设方法对验证人员脸部图片进行识别;s5、判断验证人员是否为内部机房人员。该外来人员检测方法通过配合后台系统持续的校验并发现外来人员是否有权利在机房内进行工作,持续发现可疑人员并引导外来人员进行身份验证,以确保机房硬件设备及软件和数据安全,解决了无人值守保护机房稳定运行的功能。
4.然而上述技术方案中由于人脸识别的限制经常出现漏检、误检的情况,不够稳定可靠。因此目前需要一种用于巡逻机器人的人员入侵检测系统通过摄像头人体识别+远距离rfid读卡装置的方式对指定区域内的人员进行识别,减少人力物力的浪费,降低企业成本。
技术实现要素:
5.本实用新型的目的是克服了现有技术的问题,提供了一种用于巡逻机器人的人员入侵检测系统。
6.为了达到上述目的,本实用新型采用以下方案:
7.一种用于巡逻机器人的人员入侵检测系统,包括设于巡逻机器人上的工控机,至少一个摄像头和用于识别多目标rfid标签卡的rfid读写装置,摄像头通过usb接口与工控机连接,摄像头内设有与工控机连接的人体检测装置,人体检测装置检测到人员后工控机可通过摄像头和rfid读写装置判断被测人员是否为外来人员;rfid读写装置包括壳体以及设于壳体内的读卡模块和射频天线,读卡模块与工控机连接。
8.进一步的,rfid读写装置为uhf rfid读写装置,uhf rfid读写装置的频率范围为840mhz-960mhz。uhf rfid读写装置具有多路rfid天线sma接口,支持多标签以及远距离读取,最远读写距离可达10米,结合摄像头获取的人体存在信息,可甄别出非法或无标签、卡
牌、工牌的人员,通知后台并发出警报。因此该uhf rfid读写装置可远距离读卡方式,极大降低漏检,误检的情况。
9.进一步的,壳体包括第一壳体和第二壳体,第二壳体卡接在第一壳体后部,第二壳体两侧设有用于连接云台的挂耳,壳体通过云台设于巡逻机器人上。结构简单,提高uhf rfid读写装置远距离的识别效率和准确率。
10.进一步的,工控机内设有用于连接监控后台的通信模块。
11.进一步的,摄像头为可360度旋转视频采集的摄像头。
12.进一步的,摄像头包括一个高清cmos与一个标清ccd。
13.进一步的,工控机还连接有用于检测人体方位的人体检测装置,人体检测装置检测到人员后工控机可通过摄像头和rfid读写装置判断被测人员是否为外来人员。
14.进一步的,工控机还连接有补光灯和音频报警装置。
15.与现有的技术相比,本实用新型具有如下优点:该入侵检测系统以摄像头人体识别+远距离rfid读卡装置的方式对指定区域内的人员进行识别,大大减少了漏检、误检情况的出现稳定可靠,减少人力物力的浪费,降低了企业成本。
附图说明
16.下面结合附图和具体实施方式对本申请作进一步详细的说明。
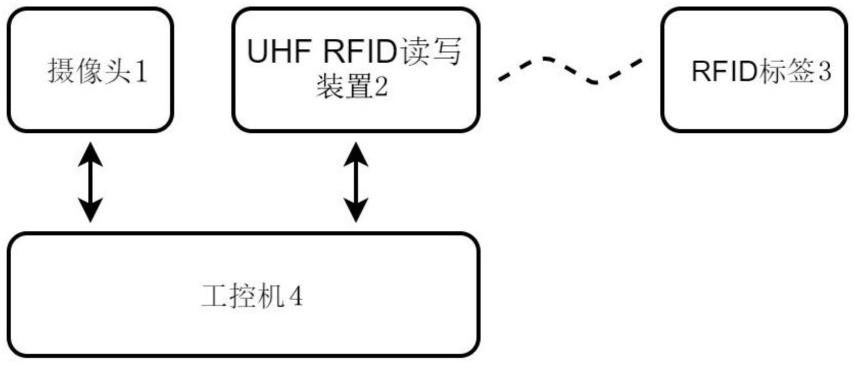
17.图1是本实用新型的一种用于巡逻机器人的人员入侵检测系统的连接示意图。
具体实施方式
18.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
19.如图1所示,一种用于巡逻机器人的人员入侵检测系统,包括设于巡逻机器人上的工控机4,至少一个摄像头1和用于识别多目标rfid标签卡3的rfid读写装置2,摄像头1通过usb接口与工控机连接,摄像头1内设有与工控机4连接的人体检测装置,人体检测装置检测到人员后工控机可通过摄像头1和rfid读写装置2判断被测人员是否为外来人员;rfid读写装置2包括壳体以及设于壳体内的读卡模块和射频天线,读卡模块与工控机连接。
20.优选的,rfid读写装置2为uhf rfid读写装置2,uhf rfid读写装置2的频率范围为840mhz-960mhz。uhf rfid读写装置2具有多路rfid天线sma接口,支持多标签3以及远距离读取,最远读写距离可达10米,结合摄像头1获取的人体存在信息,可甄别出非法或无标签3、卡牌、工牌的人员,通知后台并发出警报。因此该uhf rfid读写装置2可远距离读卡方式,极大降低漏检,误检的情况。
21.优选的,壳体包括第一壳体和第二壳体,第二壳体卡接在第一壳体后部,第二壳体两侧设有用于连接云台的挂耳,壳体通过云台设于巡逻机器人上。结构简单,提高uhf rfid读写装置2远距离的识别效率和准确率。
22.优选的,工控机4内设有用于连接监控后台的通信模块。
23.优选的,摄像头1为可360度旋转视频采集的摄像头1。
24.优选的,摄像头1包括一个高清cmos与一个标清ccd。
25.优选的,工控机4还连接有补光灯和音频报警装置。
26.与现有的技术相比,本实用新型具有如下优点:该入侵检测系统以摄像头1人体识别+远距离rfid读卡装置2的方式对指定区域内的人员进行识别,大大减少了漏检、误检情况的出现稳定可靠,减少人力物力的浪费,降低了企业成本。
27.以上仅是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本申请的保护范围。
技术特征:
1.一种用于巡逻机器人的人员入侵检测系统,其特征在于,包括设于巡逻机器人上的工控机,至少一个摄像头和用于识别多目标rfid标签卡的rfid读写装置,所述摄像头通过usb接口与所述工控机连接,所述摄像头内设有与所述工控机连接的人体检测装置,所述人体检测装置检测到人员后所述工控机可通过所述摄像头和所述rfid读写装置判断被测人员是否为外来人员;所述rfid读写装置包括壳体以及设于所述壳体内的读卡模块和射频天线,所述读卡模块与所述工控机连接。2.根据权利要求1所述的一种用于巡逻机器人的人员入侵检测系统,其特征在于,所述rfid读写装置为uhf rfid读写装置,所述uhf rfid读写装置的频率范围为840mhz-960mhz。3.根据权利要求1或2所述的一种用于巡逻机器人的人员入侵检测系统,其特征在于,所述壳体包括第一壳体和第二壳体,第二壳体卡接在第一壳体后部,第二壳体两侧设有用于连接云台的挂耳,所述壳体通过所述云台设于所述巡逻机器人上。4.根据权利要求1所述的一种用于巡逻机器人的人员入侵检测系统,其特征在于,所述工控机内设有用于连接监控后台的通信模块。5.根据权利要求1所述的一种用于巡逻机器人的人员入侵检测系统,其特征在于,所述摄像头为可360度旋转视频采集的摄像头。6.根据权利要求5所述的一种用于巡逻机器人的人员入侵检测系统,其特征在于,所述摄像头包括一个高清cmos与一个标清ccd。7.根据权利要求1所述的一种用于巡逻机器人的人员入侵检测系统,其特征在于,所述工控机还连接有补光灯和音频报警装置。
技术总结
本实用新型公开了一种用于巡逻机器人的人员入侵检测系统,包括设于巡逻机器人上的工控机,至少一个摄像头和用于识别多目标RFID标签卡的RFID读写装置,摄像头通过USB接口与工控机连接,摄像头内设有与工控机连接的人体检测装置,人体检测装置检测到人员后工控机可通过摄像头和RFID读写装置判断被测人员是否为外来人员;RFID读写装置包括壳体以及设于壳体内的读卡模块和射频天线,读卡模块与工控机连接。与现有的技术相比,本实用新型具有如下优点:该入侵检测系统以摄像头人体识别+远距离RFID读卡装置的方式对指定区域内的人员进行识别,大大减少了漏检、误检情况的出现稳定可靠,减少人力物力的浪费,降低了企业成本。降低了企业成本。降低了企业成本。
技术研发人员:索旭东 刘兴亮 黄嘉辉 覃韦懿
受保护的技术使用者:智能移动机器人(中山)研究院
技术研发日:2022.05.18
技术公布日:2022/10/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1