一种混合网联环境下快速路专用道的动态控制方法
本发明属于专用车道调控领域,具体涉及一种混合网联环境下快速路专用道动态控制方法。
背景技术:
1、当网联车辆大规模应用后,城市快速路交通流将由传统单一的人工驾驶车辆转变为由人工驾驶车辆和网联车辆组成的异质交通流混行状态,面向传统车辆的交通网络无法适应于交通系统网联化的要求,需要采取措施来提升通行效率并改善交通安全。
2、目前,设置网联车辆专用道被认为是提升路网交通效益的有效途径。网联车辆可以借助专用道上的通信设施和路侧设施实现自动化驾驶,在提高道路通行能力的同时一定程度上避免网联车辆和人工驾驶车辆之间的冲突,有利于发挥车路协同技术的优势。但网联车辆专用道的建设占用了原有的道路资源,效率优先的网联车辆专用道设置研究可能会造成道路资源的浪费,当网联车辆流量相对较低时,网联车辆专用车道可能未得到充分利用,甚至可能影响整体网络性能。因此,需要为网联车辆专用道设计一种新的车道管理形式,保证专用道在网联车辆渗透率较低时的利用率。
3、当网联车辆专用道利用率较低时,允许人工驾驶车辆使用网联车辆专用道,通过总影响因子来抑制分配和引导交通需求,从而缓解交通拥堵,减少道路资源的浪费。道路上的交通量在不断变化,单一的控制策略不能适应变化的交通流,不能达到最优状态。
技术实现思路
1、本发明为克服现有技术的不足之处,提出一种混合网联环境下快速路专用道的动态控制方法,旨在解决道路资源的浪费问题,缓解交通拥堵,从而能提高道路通行效率和道路通行能力。
2、本发明为达到上述目的,采用如下技术方案:
3、本发明一种混合网联环境下快速路专用道的动态控制方法,适用于单向两车道的道路场景中,其中,一条车道为网联车辆专用道,另一条车道为普通车道,令两车道上的网联车辆渗透率p均低于网联车辆最大渗透率pmax,在普通车道和网联车辆专用道上行驶有人工驾驶车辆,而网联车辆仅在网联车辆专用道行驶,其特点在于,所述控制方法包括以下步骤:
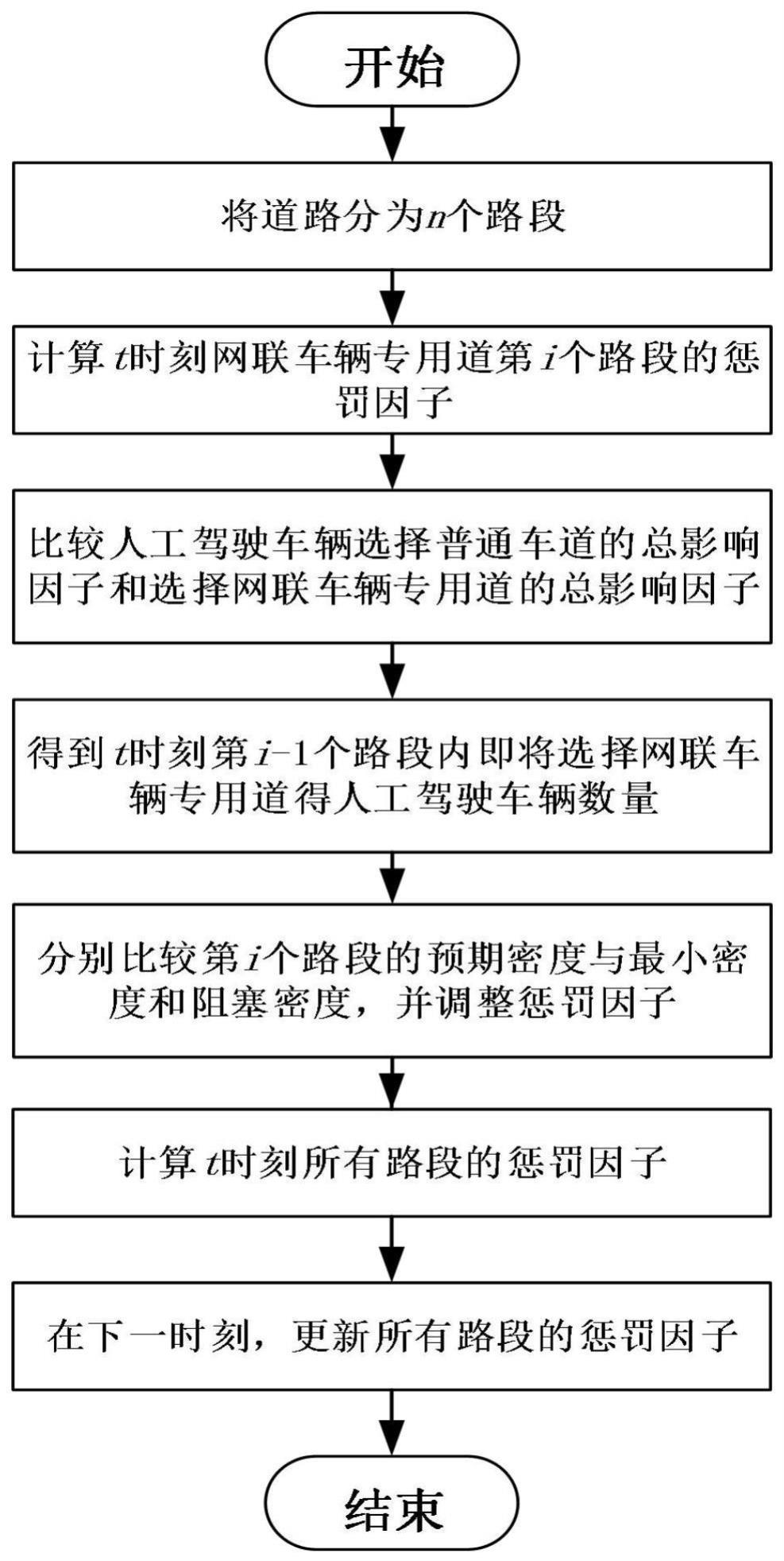
4、步骤1、将两车道等分为n个路段,并从上游至下游依次进行编号,令i表示任意一个路段的编号;初始化i=2;
5、令每条车道的长度为l,则第i个路段的长度为
6、令网联车辆专用道上第i个路段的通行能力记为cexclusive(i),普通车道上第i个路段的通行能力记为cordinary(i),令第i个路段的自由流速度为vfree(i);每条车道的阻塞密度为kjam;
7、步骤2、获取t时刻网联车辆专用道上第i个路段的密度并与阻塞密度kjam进行比较,若则执行步骤3;否则,表示网联车辆专用道上的车辆已饱和,并则执行步骤17;
8、步骤3、获取t时刻网联车辆专用道上第i个路段的车流量以及普通车道上第i个路段的车流量并通过式(1)计算t时刻第i-1个路段的人工驾驶车辆通过网联车辆专用道上第i个路段所需时间因子
9、
10、式中,α、β为bpr函数的参数;
11、通过式(2)计算t时刻第i-1个路段上的人工驾驶车辆通过普通车道的第i个路段所需时间因子
12、
13、步骤4、获取t时刻网联车辆专用道上第i-1个路段的密度并通过式(3)计算t时刻网联车辆专用道上第i个路段的惩罚因子ui(t):
14、
15、式(3)中,ui-1(t)为网联车辆专用道第i-1个路段的惩罚因子,k*为理想密度,θ为控制系数,且θ>0;当i=2时,利用式(4)得到t时刻网联车辆专用道上第i-1个路段的惩罚因子ui-1(t):
16、
17、步骤5、获取t时刻第i-1个路段上所有人工驾驶车辆的数量并将辆车辆按顺序进行编号,令t时刻第i-1个路段上任意一辆人工驾驶车辆的序号为j,并初始化j=1;
18、定义t时刻第i-1个路段上的前j辆人工驾驶车辆中,将要驶入网联车辆专用道上第i个路段的人工驾驶车辆数为并初始化
19、步骤6、判断t时刻第i-1个路段上第j辆人工驾驶车辆的位置,若第j辆人工驾驶车辆位于普通车道上的第i-1个路段,则执行步骤7;若第j辆人工驾驶车辆位于网联车辆专用道上的第i-1个路段,则执行步骤8;
20、步骤7、确定普通车道上第i-1个路段的人工驾驶车辆是否选择网联车辆专用道:
21、步骤7.1、利用式(5)和式(6)分别计算t时刻第j辆人工驾驶车辆使用网联车辆专用道的第i个路段的总影响因子以及第j辆人工驾驶车辆使用普通车道的第i个路段的总影响因子
22、
23、
24、式(5)中,表示t时刻第j辆人工驾驶车辆的驾驶员使用网联车辆专用道的第i个路段的时间值;
25、步骤7.2、若则将第j辆人工驾驶车辆加入第i个路段普通车道的车辆集合中,并执行步骤9;若则将第j辆人工驾驶车辆加入第i个路段网联车辆专用道的车辆集合中,将赋值给并执行步骤9;
26、步骤8、确定网联车辆专用道上第i-1个路段的人工驾驶车辆是否选择网联车辆专用道:
27、步骤8.1、利用式(5)和式(6)分别计算第j辆人工驾驶车辆使用网联车辆专用道的第i个路段的总影响因子以及第j辆人工驾驶车辆使用普通车道的第i个路段的总影响因子
28、
29、步骤8.2、若则执行步骤8.3;若则将第j辆人工驾驶车辆加入第i个路段网联车辆专用道的车辆集合中,将赋值给并执行步骤9;
30、步骤8.3、统计普通车道上第i个路段的密度并与阻塞密度kjam进行比较,若则将第j辆人工驾驶车辆加入第i个路段普通车道的车辆集合中,并执行步骤9;若则表示普通车道上第i个路段的车辆已饱和,第j辆人工驾驶车辆无法换入普通车道上的第i个路段,并执行步骤8.4;
31、步骤8.4、通过式(7)计算第j辆人工驾驶车辆使用网联车辆专用道的优化惩罚因子
32、
33、式(7)中,ζ为优化系数,ζ>0;
34、步骤8.5、将第j辆人工驾驶车辆加入第i个路段网联车辆专用道的车辆集合中,将赋值给并执行步骤9;
35、步骤9、若则将j+1赋值给j,返回步骤6顺序执行;否则,执行步骤10;
36、步骤10、获取t时刻第i-1个路段上的人工驾驶车辆数量网联车辆数量将t时刻第i个路段网联车辆专用道的车辆集合中的人工驾驶车辆数记为由式(8)计算t时刻第i个路段的最小密度
37、
38、式(8)中,为所设定的最小密度;
39、步骤11、利用式(9)得到t时刻网联车辆专用道上第i个路段的预期密度ksioon(t);
40、
41、步骤12,若则执行步骤13;若则执行步骤14;
42、步骤13、由式(10)获得网联车辆专用道上第i个路段调整后的惩罚因子ui′(t)并赋值给ui(t)后,返回步骤6顺序执行;
43、
44、步骤14、若则执行步骤15;若则执行步骤16;
45、步骤15、利用式(11)获得网联车辆专用道上第i个路段调整后的惩罚因子u″i(t)并赋值给ui(t)后,返回步骤6顺序执行;
46、
47、步骤16、将t时刻第i个路段网联车辆专用道的车辆集合和普通车道的车辆集合中所有人工驾驶车辆进行换道,驶入第i个路段;
48、步骤17、若i<n,则将i+1赋值给i,返回步骤2顺序执行,否则,执行步骤18;
49、步骤18、将t+δt赋值给t,返回步骤1顺序执行,其中,δt表示控制周期。
50、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述混合网联环境下快速路专用道的动态控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
51、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述混合网联环境下快速路专用道的动态控制方法的步骤。
52、与已有技术相比,本发明的有益技术效果体现在:
53、1、本发明可实时通过道路交通状况的变化来确定惩罚因子,人工驾驶车辆通过动态的车道选择模型来选择车道,在保证网联车辆在专用道优先行使权的情况下,充分利用了道路资源,实现了网联车辆专用道的共享,减少了延误,提高了道路通行能力。
54、2、本发明利用元胞传输思想计算每个路段的惩罚因子,并预测人工驾驶车辆在该路段的车道选择情况,从而提高了预测速度的准确性,优化了控制方法的计算效率。
55、3、与现有技术相比,本发明充分考虑了人工驾驶车辆驾驶员的异质性,可真实的反映交通状况,从而提高了预测精度。
- 还没有人留言评论。精彩留言会获得点赞!