轨迹预测方法、装置及电子处理装置与流程
本技术涉及无人驾驶领域,具体而言,涉及一种轨迹预测方法、装置及电子处理装置。
背景技术:
1、在现有的轨迹预测算法中,主要使用基于光栅渲染表示的方法,这种方法的思想将当前复杂的环境信息和智能体历史状态渲染到鸟瞰视角的图像中作为输入形式,并使用卷积神经网络来提取特征与解码预测信息。在上述的方法中使用卷积神经网络进行图像层面的特征提为密集型计算,计算量较大,轨迹预测效率较低。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种轨迹预测方法、装置及电子处理装置,能够提高轨迹预测效率。
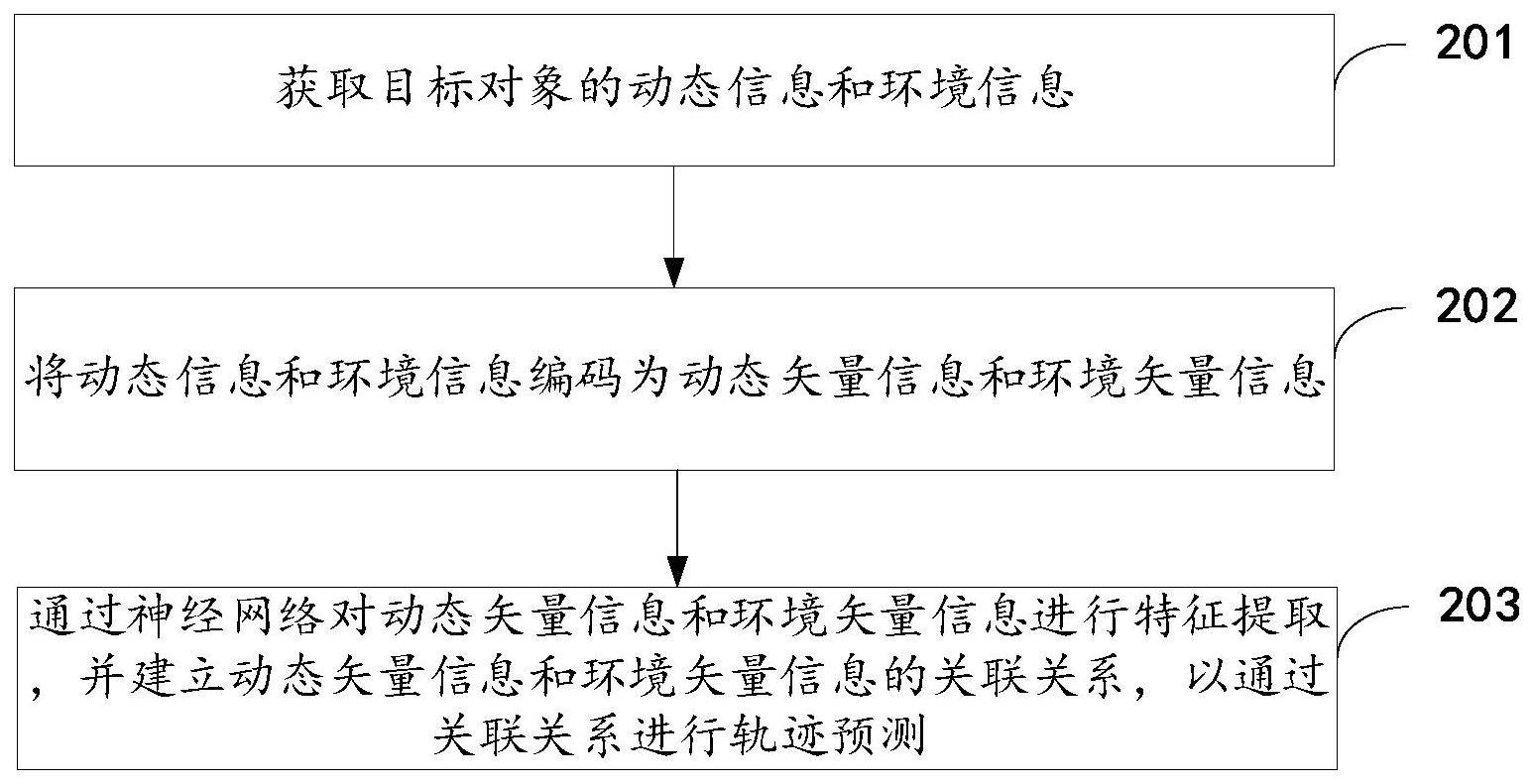
2、第一方面,本技术实施例提供了一种轨迹预测方法,包括:获取目标对象的动态信息和环境信息;将所述动态信息和所述环境信息编码为动态矢量信息和环境矢量信息;通过神经网络对所述动态矢量信息和所述环境矢量信息进行特征提取,并建立所述动态矢量信息和所述环境矢量信息的关联关系,以通过所述关联关系进行轨迹预测。
3、在上述实现过程中,通过将目标对象的动态信息和环境信息均编码为矢量信息,并将该矢量信息作为神经网络的输入,不仅统一了目标对象静态信息和动态信息输入的表征形式,降低了神经网络模型构建的难度。另外,由于神经网络的输入由矢量信息代替图像信息,对该矢量信息的处理不需要再进行渲染,也不需要进行密集型计算,减少了计算资源开销,提高了预测速度。
4、在一个实施例中,所述神经网络包括多层感知机,所述通过所述神经网络对所述动态矢量信息和所述环境矢量信息进行特征提取,并建立所述动态矢量信息和所述环境矢量信息的关联关系,以通过所述关联关系进行轨迹预测,包括:通过多层感知机提取所述动态矢量信息和所述环境矢量信息的中间特征;根据所述动态矢量信息和所述环境矢量信息的中间特征建立所述动态矢量信息和所述环境矢量信息的关联关系,以通过所述关联关系进行轨迹预测。
5、在上述实现过程中,通过多层感知机对输入的动态矢量信息和环境矢量信息进行中间特征提取,以实现不同矢量信息分别提取,防止了各个矢量信息之间的相互干扰,提高了特征提取的准确性。
6、在一个实施例中,所述神经网络还包括:自注意力机制和全连接图网络,所述根据所述动态矢量信息和所述环境矢量信息的中间特征建立所述动态矢量信息和所述环境矢量信息的关联关系,以通过所述关联关系进行轨迹预测,包括:通过所述全连接图网络获取所述动态矢量信息和所述环境矢量信息的中间特征间的交互关系;通过所述自注意力机制将所述中间特征间的交互关系进行全局信息的提取,以确定出所述动态矢量信息和所述环境矢量信息的关联关系,以通过所述关联关系进行轨迹预测。
7、在上述实现过程中,自注意力机制将中间特征间的交互关系进行全局信息的提取,能够准确的捕捉目标对象与周围环境的交互信息,提高轨迹预测的准确性。
8、在一个实施例中,所述目标对象的轨迹预测为多条预测轨迹,所述通过所述关联关系进行轨迹预测之后,所述方法包括:基于深度学习确定每个预测轨迹对应的概率;输出概率最高的预测轨迹为所述目标对象的最终预测轨迹。
9、在上述实现过程中,在确定出多条预测轨迹时,通过神经网络确定多条预测轨迹发生的概率,以将发生概率最大的预测轨迹作为最终预测轨迹,提高了轨迹的预测准确性。
10、在一个实施例中,所述环境信息包括车道信息,所述车道信息包括:车道线和车道中心线,所述环境矢量信息包括车道矢量信息,所述车道线及车道中心线通过设置间隔第一预设距离的第一采样点构建为多段折线形式,所述将所述动态信息和所述环境信息分别编码为动态矢量信息和环境矢量信息,包括:将所述车道信息中各第一采样点的位置信息编码为第一位置向量;根据所述第一位置向量构建车道二维矩阵,以形成车道矢量信息。
11、在上述实现的过程中,由于车道信息通常为连续的直线,在进行矢量编码时,通过将该直线转换为多段折线的形式,分别获取车道信息中各第一采样点的位置信息以构建车道二维矩阵,将车道信息转换为矢量信息,不需要再通过图像处理的方式对车道信息进行提取,减少了密集型计算,减少了计算资源开销。另外,还防止了图像渲染过程中的信息损失,提高了车道信息传输的完整性。
12、在一个实施例中,所述环境信息包括闭环拓扑信息,所述环境矢量信息包括闭环拓扑矢量信息,所述闭环拓扑信息通过设置间隔第二预设距离的第二采样点构建为闭环连接的多段折线形式,所述将所述动态信息和所述环境信息分别编码为动态矢量信息和环境矢量信息,包括:将所述闭环拓扑信息各第二采样点的位置信息编码为第二位置向量;根据所述第二位置向量构建闭环拓扑二维矩阵,以形成闭环拓扑矢量信息;其中,所述闭环拓扑二维矩阵中起始的二维矩阵中的起始二维向量与所述闭环拓扑二维矩阵中最后二维矩阵中的最后二维向量相等。
13、在上述实现过程中,由于该闭环拓扑信息在进行编码时,将该闭环拓扑信息转换为闭环连接的多段折线形式,能够获取到该闭环拓扑信息中的所有特征信息,提高了闭环拓扑信息编码的完整性和准确性。另外,将闭环拓扑信息转换为矢量信息,不需要再通过图像处理的方式对闭环拓扑信息进行提取,减少了密集型计算,减少了计算资源开销,还防止了图像渲染过程中的信息损失,提高了车道信息传输的完整性。
14、在一个实施例中,所述动态信息包括历史轨迹信息,所述动态矢量信息包括轨迹矢量信息,所述将所述动态信息和所述环境信息分别编码为动态矢量信息和环境矢量信息,包括:将所述历史轨迹信息中各轨迹点的位置信息编码为轨迹点位置向量;根据所述轨迹点位置向量构建轨迹二维矩阵,以形成轨迹矢量信息。
15、在上述实现过程中,由于目标对象在行驶过程中,形成的历史轨迹是过去的每个时间点的轨迹点的集合,通过根据将各个轨迹点编码为轨迹点位置向量,以构建轨迹二维矩阵,将历史轨迹信息转换为矢量信息,不需要再通过图像处理的方式对历史轨迹信息进行提取,减少了密集型计算,减少了计算资源开销。另外,还防止了图像渲染过程中的信息损失,提高了历史轨迹信息传输的完整性。
16、第二方面,本技术实施例还提供一种轨迹预测装置,包括:获取模块:用于获取目标对象的动态信息和环境信息;编码模块:用于将所述动态信息和所述环境信息编码为动态矢量信息和环境矢量信息;预测模块:用于通过神经网络对所述动态矢量信息和所述环境矢量信息进行特征提取,并建立所述动态矢量信息和所述环境矢量信息的关联关系,以通过所述关联关系进行轨迹预测。
17、第三方面,本技术实施例还提供一种电子处理装置,包括:处理器、存储器,所述存储器存储有所述处理器可执行的机器可读指令,当处理装置运行时,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面的任一种可能的实施方式中的方法的步骤。
18、第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面的任一种可能的实施方式中轨迹预测方法的步骤。
19、为使本技术的上述目的、特征和优点能更明显易懂,下文特举实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!