自主船航行诱导方法和装置
本发明涉及海上船舶航行安全领域,属于船舶智能驾驶技术,特别涉及一种自主船航行诱导方法和装置。
背景技术:
1、在交通密度大、条件复杂的海域或港口,提高船舶的海上航行安全性是一个关键问题。为了提高船舶在航行中的安全性,有必要为船舶智能导航系统提供航迹预测和危险预警功能。然而,由于海洋环境的复杂多变,特别是在拥挤的港口水域,对于无人驾驶或者自主航行类型的船舶,要实现对于周围航行环境,特别是对于其他船舶类运动目标的预测却并非易事。
技术实现思路
1、本发明实施例提供了一种基于时空动态图神经网络的自主船航行诱导方法。该方法技术方案包括,
2、不仅考虑船舶自身属性对其海上航迹的影响,而且还将自身与围船舶之间的相互作用纳入建模。还包括一种能够同时捕获时间性和空间性依赖的统一框架,并且可以有效地防止在捕捉远程序列时遭受梯度消失和爆炸。
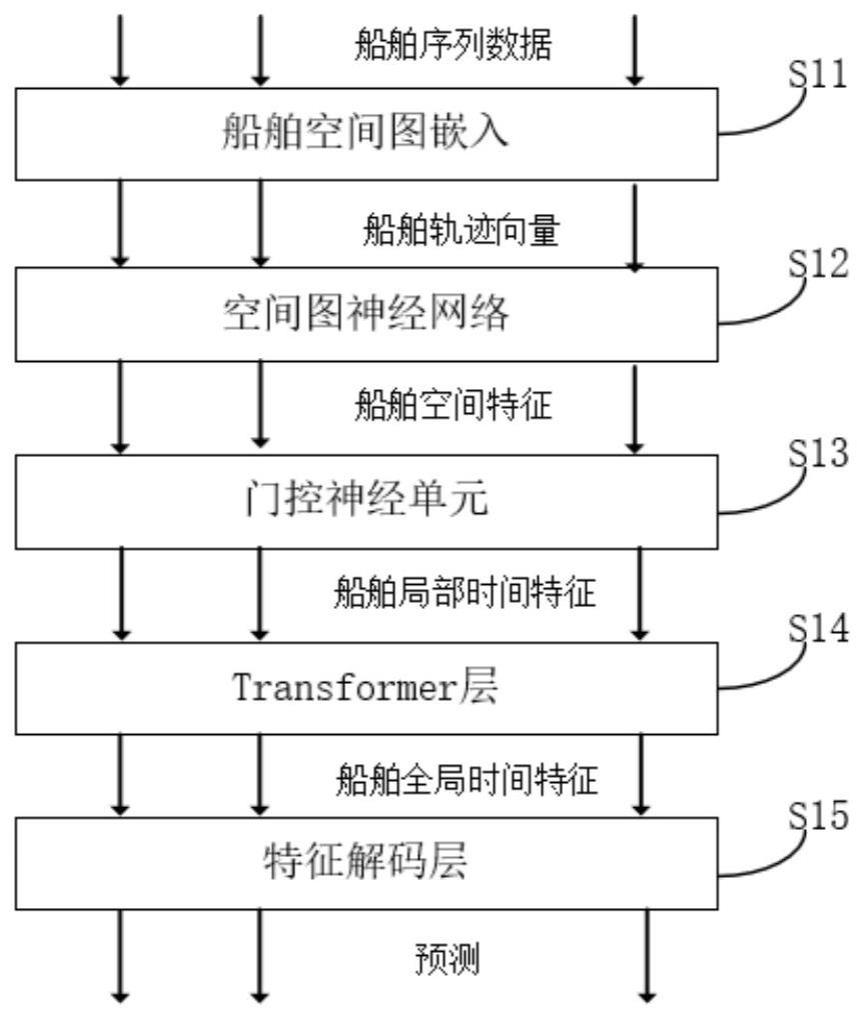
3、本发明实施例,首先利用空间图神经网络来学习船舶航行态势感知图,捕获实体的空间依赖性。在空间图神经网络中,还设计了一种知识感知的图注意力机制用于计算相邻的实体和协同关系对目标实体的影响大小。
4、然后利用gru网络对所学实体嵌入进行编码,获取实体的局部时间依赖性;其次利用transformer对所学实体嵌入进行编码,获取实体的全局时间依赖性;最后利用gru网络来解码所学的实体嵌入以训练模型并进行合理的预测,即航行诱导。
5、实验表明,本发明实施例所提供的方法,能够有效解决海上航行船舶间交互建模中对空间依赖和时间依赖的局限性问题,并有效地聚合来自相邻船舶的信息,为自主船提供更合理和更精准的航行诱导。
技术特征:
1.一种自主船航行诱导方法,其特征在于,通过经过训练的航迹时空预测模型,对所述自主船及周围船舶的行为做出预测,从而对所述自主船的航行进行诱导,
2.根据权利要求1所述的自主船航行诱导方法,其特征在于,所述船舶航行态势感知图gθ,其中,gθ=(εθ,rθ),是图gθ的顶点集合,n是船舶数量;
3.根据权利要求2所述的自主船航行诱导方法,其特征在于,利用空间图神经网络模型学习所述船舶航行态势感知图gθ,捕获船舶之间的空间关系特征。
4.根据权利要求3所述的自主船航行诱导方法,其特征在于,利用所述空间图神经网络模型的学习过程包括:
5.根据权利要求2所述的自主船航行诱导方法,其特征在于,利用gru门控单元模型捕获实体的局部时间依赖特征。
6.根据权利要求5所述的自主船航行诱导方法,其特征在于,所述实体的局部时间依赖关系指的是θ-1、θ、θ+1相邻时间间隔中船舶所表现出来的运动模式具有相似性,即所代表的实体嵌入之间具有相似性,v指船舶。
7.根据权利要求2所述的自主船航行诱导方法,其特征在于,利用transformer模型捕获船舶实体的全局时间依赖特征。
8.根据权利要求7所述的自主船航行诱导方法,其特征在于,所述全局时间依赖特征,是一个完整时间段内的序列数据包含船舶运动特征,表示了串联船舶运动模式。
9.根据权利要求2所述的自主船航行诱导方法,其特征在于,利用gru网络模型来解码实体嵌入以训练航迹时空预测模型,进而预测船舶航行轨迹。
10.一种自主船航行诱导装置,其特征在于,所述装置包括存储器;以及
11.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时,实现如权利要求1至9中任一所述的方法。
技术总结
本发明公开了一种自主船航行诱导方法,通过经过训练的航迹时空预测模型,对所述自主船及周围船舶的行为做出预测,从而对所述自主船的航行进行诱导。所述预测模型的建立过程包括,通过获得所述自主船周围船舶的航路时间序列数据,构建所述自主船的船舶航行态势感知图G<supgt;θ</supgt;,该船舶航行态势感知图G<supgt;θ</supgt;反映了所述自主船及周围的船舶航行态势,这里的船舶航行姿态包括船舶坐标、时间戳、对地航速、对地航向;通过对所述船舶航行态势感知图G<supgt;θ</supgt;的实体嵌入,获得船舶轨迹向量,并且由机器学习捕获船舶之间的空间特征、捕获船舶的局部时间特征、捕获船舶的全局时间特征;通过深度学习解码所获得的特征,用以训练所述航迹时空预测模型。
技术研发人员:刘晋,张喜亮,吴中岱,王骏翔
受保护的技术使用者:上海海事大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!