一种基于人工智能的隧道交通安全预警系统及方法与流程
本发明涉及隧道交通应急管理,具体为一种基于人工智能的隧道交通安全预警系统及方法。
背景技术:
1、当驾驶人员从非常明亮的环境驶入黑暗的隧道内,会出现人眼瞳孔直径呈现剧烈、高频率的波动,这是因为驾驶人员处于暗适应瞬盲过程,人眼出现上述现象是为了寻找比较合适的感光模式,而当人眼确定了合适的瞳孔直径,并且开始转换视觉功能以适应隧道内的低照度环境后,瞳孔直径以较慢的速度增加,直至完全适应为止;当驾驶人到达隧道洞口位置时,外部的亮度急剧增加,会出现人眼瞳孔直径急剧、高频率的缩放,这是因为驾驶人员处于明适应瞬盲阶段,人眼产生瞬时盲期是为了保护眼睛不受损害/
2、随着我国交通的迅速发展,隧道的建设越来越多,隧道可以大大提高交通能力,但是隧道的内部行驶安全也十分重要;隧道内部一般比较昏暗,且受明适应和暗适应现象的存在,车辆在隧道内行驶存在的危险指数相对较高,司机若受明适应和暗适应现象的影响在短暂性失明状态下无法把控行车距离,一旦前车的减速幅度大于后车的减速幅度,就会出现追尾事故。
技术实现思路
1、本发明的目的在于提供一种基于人工智能的隧道交通安全预警系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于人工智能的隧道交通安全预警方法,方法包括:
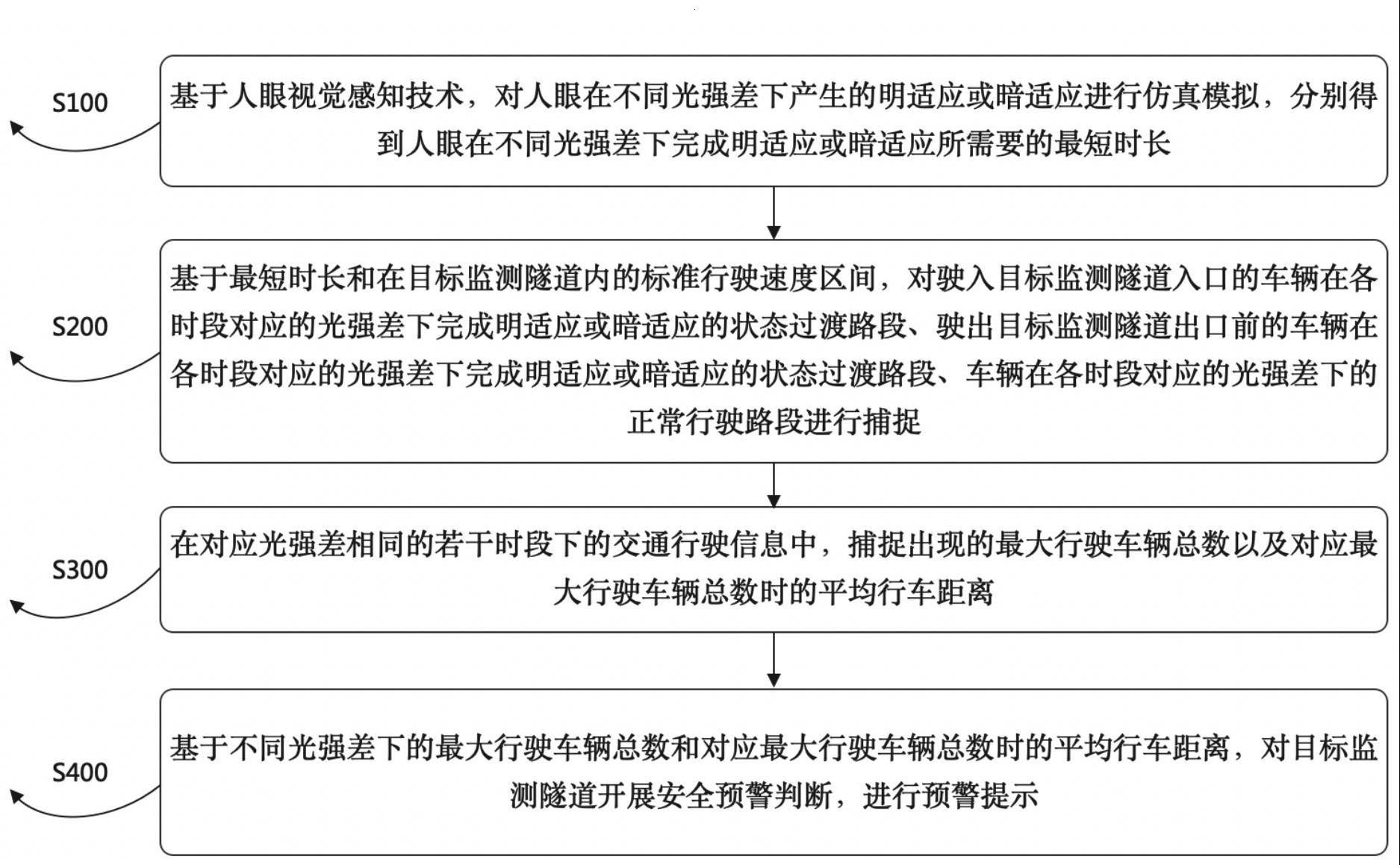
3、步骤s100:基于人眼视觉感知技术,对人眼在不同光强差下产生的明适应或暗适应进行仿真模拟,分别得到人眼在不同光强差下完成明适应或暗适应所需要的最短时长;
4、步骤s200:基于最短时长和在目标监测隧道内的标准行驶速度区间,对驶入目标监测隧道入口的车辆在各时段对应的光强差下完成明适应或暗适应的状态过渡路段、驶出目标监测隧道出口前的车辆在各时段对应的光强差下完成明适应或暗适应的状态过渡路段、车辆在各时段对应的光强差下的正常行驶路段进行捕捉;
5、步骤s300:在对应光强差相同的若干时段下的交通行驶信息中,捕捉出现的最大行驶车辆总数以及对应最大行驶车辆总数时的平均行车距离;
6、步骤s400:基于不同光强差下的最大行驶车辆总数和对应最大行驶车辆总数时的平均行车距离,对目标监测隧道开展安全预警判断,进行预警提示。
7、进一步的,步骤s100包括:
8、步骤s101:对目标监测隧道入口前的限速标志进行信息识别,获取在目标监测隧道内标准行驶的标准行驶速度区间;分别采集在任意时段ti下,目标监测隧道的出入口光照强度内部光照强度
9、步骤s102:分别计算目标监测隧道在对应任意时段ti下呈现出的光强差基于人眼视觉感知技术,进行人眼的明适应和暗适应的仿真模拟,分别获取人眼在对应光强差下完成明适应或暗适应所需要的最短时长。
10、进一步的,步骤s200包括:
11、步骤s201:采集目标监测隧道在各时段下对应的交通行驶信息,交通行驶信息包括行驶车辆数量信息、各行驶车辆的车型信息、各行驶车辆的实时车速信息;根据目标监测隧道所对应的标准行驶速度区间,锁定在目标监测隧道内的最低行驶速度;
12、步骤s202:基于最低行驶速度和人眼在各时段对应的光强差下完成明适应或暗适应所需要的最短时长,分别获取驶入目标监测隧道入口的车辆在各时段对应的光强差下,从结束明适应或暗适应恢复至正常驾驶状态时,距离目标监测隧道入口的最近起算点位置,设最近起算点位置为对应各时段的光强差的第一起算点位置;
13、步骤s203:基于最低行驶速度和人眼在各时段对应的光强差下完成明适应或暗适应所需要的最短时长,分别获取驶出目标监测隧道出口前的车辆在各时段对应的光强差下,从结束正常驾驶状态至开始进入明适应或暗适应时,距离目标监测隧道出口的最近起算点位置,设最近起算点位置为对应各时段的光强差的第二起算点位置;
14、步骤s204:将目标监测隧道入口至第一起算点位置之间的路段、目标监测隧道出口至第二起算点位置之间的路段,分别设为驶入目标监测隧道入口的车辆在各时段对应的光强差下完成明适应或暗适应的第一状态过渡路段和驶出目标监测隧道出口前的车辆在各时段对应的光强差下完成明适应或暗适应的第二状态过渡路段;将第一起算点位置至第二起算点位置之间的路段设为各时段对应的光强差下的正常行驶路段;
15、默认在从第一起算点位置至目标监测隧道入口之间的路段以及从第二起算点位置至目标监测隧道出口之间的路段,驾驶车辆的司机受明适应或暗适应的影响,存在短暂性的失明状态,即默认司机在这段路段内存在不稳定驾驶状态,默认在正常行驶路段内行驶的车辆均处于不受明适应或暗适应影响的稳定状态;
16、光强差值的不同会影响司机实际适应明适应或暗适应的时间,进而影响实际的第一起算点位置和第二起算点位置,在极大的光强差下,人眼在最初一瞬间会感到光线刺眼发眩,几乎看不清外界事物;
17、上述基于行驶状态的不同进行路段划分的过程是为了方便在后续捕捉到于最接近安全预警事件发生时的车辆行驶状态数据,作为预警事件的监测判断依据。
18、进一步的,步骤s300包括:分别汇集在对应光强差相同的所有时段下的交通行驶信息,捕捉在满足限制条件时出现的最大行驶车辆总数,获取在最大行驶车辆总数时对应的平均行车距离,分别得到对应不同光强差下的最大行驶车辆总数和平均行车距离;限制条件为:行驶在对应正常行驶路段内的各行驶车辆的平均行驶速度均处于目标监测隧道的标准行驶速度区间内。
19、进一步的,步骤s400包括:
20、步骤s401:当检测到在某一光强差下的目标监测隧道内,正处于某一光强差下对应的正常行驶路段内的行驶车辆总数大于某一光强差下对应的最大行驶车辆总数或者捕捉到行车距离大于平均行车距离的次数大于次数阈值时,在第一状态过渡路段、第二状态过渡路段内进行行驶车辆检测;
21、步骤s402:当在第一状态过渡路段内检测到存在行驶车辆,设行驶车辆为第一目标车辆,设位于正常行驶路段内距离第一目标车辆最近的车辆为第二目标车辆;获取第一目标车辆的车速v1、第二目标车辆的车速v2、第一目标车辆与第二目标车辆之间的距离l,计算相对安全过渡时长t=l/(v1-v2),提取人眼在某一光强差下完成明适应或暗适应所需要的最短时长t,当t<t时,对处于第一目标车辆之后包含第一目标车辆在内的行驶车辆发送加强减速的预警提示;
22、步骤s403:当在第二状态过渡路段内检测到存在行驶车辆,设行驶车辆为第一目标车辆,设位于正常行驶路段内距离第一目标车辆最近的车辆为第二目标车辆;获取第一目标车辆的车速v1、第二目标车辆的车速v2、第一目标车辆与第二目标车辆之间的距离l,计算相对安全过渡时长t=l/(v2-v1),提取人眼在某一光强差下完成明适应或暗适应所需要的最短时长t,当t<t时,对处于第二目标车辆之后包含第二目标车辆在内的行驶车辆发送加强减速的预警提示。
23、为更好的实现上述方法还提出了一种隧道交通安全预警系统,系统包括:人眼仿真模拟处理模块、路段起算点位置识别模块、路段信息捕捉管理模块、车辆特征行驶信息提取模块、目标监测隧道预警提示模块;
24、人眼仿真模拟处理模块,用于根据人眼视觉感知技术,对人眼在不同光强差下产生的明适应或暗适应进行仿真模拟,分别得到人眼在不同光强差下完成明适应或暗适应所需要的最短时长;
25、路段起算点位置识别模块,用于根据最短时长和在目标监测隧道内的标准行驶速度区间,对驶入目标监测隧道入口的车辆在各时段对应的光强差下完成明适应或暗适应的状态过渡路段、驶出目标监测隧道出口前的车辆在各时段对应的光强差下完成明适应或暗适应的状态过渡路段进行起算点位置捕捉识别;
26、路段信息捕捉管理模块,用于接收路段起算点位置识别模块中的数据,将目标监测隧道划分为第一状态过渡路段、第二状态过渡路段、正常行驶路段;
27、车辆特征行驶信息提取模块,用于在对应光强差相同的若干时段下的交通行驶信息中,捕捉出现的最大行驶车辆总数以及对应最大行驶车辆总数时的平均行车距离;
28、目标监测隧道预警提示模块,用于根据在不同光强差下的最大行驶车辆总数和对应最大行驶车辆总数时的平均行车距离,对目标监测隧道开展安全预警判断,进行预警提示。
29、进一步的,路段起算点位置识别模块包括第一起算点位置识别单元、第二起算点位置识别单元;
30、第一起算点位置识别单元,用于获取在不同光强下,从结束明适应或暗适应恢复至正常驾驶状态时,距离目标监测隧道入口的最近起算点位置;
31、第二起算点位置识别单元,用于获取在不同光强差下,从结束正常驾驶状态至开始进入明适应或暗适应时,距离目标监测隧道出口的最近起算点位置。
32、进一步的,目标监测隧道预警提示模块包括行驶信息监测单元、预警提示单元;
33、行驶信息监测单元,用于根据在不同光强差下的最大行驶车辆总数和对应最大行驶车辆总数时的平均行车距离,对目标监测隧道开展安全预警判断;
34、预警提示单元,用于接收行驶信息监测单元中的数据,对车辆发送预警提示。
35、与现有技术相比,本发明所达到的有益效果是:本发明通过对在不同光强差环境下发生的明适应和暗适应现象进行分析,获取人眼过渡明适应和暗适应现象的最短时长,基于最短时长对目标监测隧道进行路段划分,捕捉在不同光强差下于最接近安全预警事件发生时的车辆行驶状态数据,对目标监测隧道内行驶的车辆进行状态监测以及发送相关的预警提示,从而为出入隧道内的司机提供预警判断,防止追尾事件的发生,降低在隧道内发生的事故率,保证司机在出入隧道过程中的驾驶安全。
- 还没有人留言评论。精彩留言会获得点赞!