基于卡口车牌识别数据的实时路况监测系统及其方法与流程
本发明属于智慧交通领域,具体涉及基于卡口车牌识别数据的实时路况监测系统及其方法。
背景技术:
1、随着经济的发展、公路交通出行日益繁忙,高速公路成为城市间货物运输、人员流动的主要运输通道。随之而来,平安、高效出行的要求使得对高速实时运行状况精细化监测的需求越来越高,实时监测、定位准确、快速响应是未来高速发展和管理的重要方向,也是智能交通时代显著特点。
2、然而,路网规模的不断扩大,车流量的增加,高速公路的运行管理难度提高。定点监测设备布设成本高、覆盖范围有限,由于出行数据敏感车载gps不适用社会车辆等问题,给高速公路的精细化监测造成了一定的阻碍。
3、现有技术包括:
4、基于车载数据采集设备的路网运行流量监测及溯源方法
5、车载数据采集设备通常采集车辆运行过程中的gps点位和数据采集时间,通常包括浮动车(fcd)数据、网约车数据和手机导航数据。这些数据经过清洗处理后,将gps点位与路网进行地图匹配后得到车辆在路网的运行轨迹,从而获得道路运行流量和速度。该方法在应用时存在以下问题:首先在地图匹配时需要对每辆车的gps点位计算其行驶轨迹,计算压力较大;其次在道路运行监测时,样本数据为有偏样本,浮动车和网约车大多为社会公共出行的车辆,需要实时手机导航的车辆也非全量样本,其对路网流量监测结果只是部分流量,非全网流量。在实际应用中发现,受限于有偏样本和数据规模问题,实时路网监测结果无法完全覆盖全网道路,低等级路段监测结果缺失严重。
6、基于物联网射频技术的城市道路流量监测及溯源方法(地磁数据)
7、基于物联网射频技术的城市路况监测方法通过在监测区域内的路网中部署大量用于路况监测的传感器,同时配合车载传感器,当车辆经过路侧传感器时,车载传感器和路侧传感器通过射频技术完成通讯,识别并转发车辆信息。该方法获得的数据定位准确度高,其路网监测精度随着安装车载传感器的车辆数量增多而提高,但是受限于射频传感器布设规模大、成本高,以及私家车辆出行数据敏感、普通人拒绝安装车载传感器等因素,该方法难以大规模使用。
8、基于手机信令的高速出行流量监测方法
9、基于手机信令分析的路况监测系统,将通信运营商的手机信令作为信息源,通过数学建模分析产生手机信令的手机终端在移动通信网络中的空间分布和移动规律,融合交通行业现有的与公路网运行相关的数据源,通过多源数据融合分析获得公路网的实时交通状态。受限于手机信令定位数据为基站位置,而非手机实际位置,手机信令数据的定位精度低于车载gps数据,点位数据更新频率较低,无法应用在实时性高和空间粒度小的路况流量监测和流量溯源场景中。
10、由以上介绍可知,现有的实时路况监测方法主要的不足为:
11、现有技术(1)和(2),均需要车载数据采集设备,完成车辆位置数据采集工作。车载数据采集方案受限于传感器布设成本高、私家车辆出行数据敏感,数据采集车辆非全网运行车辆的问题,其天生带有流量监测不全的问题。
12、现有技术(3)中手机信令数据由于其定位精度不够,只能应用于高速路网等长距离出行的路网运行监测,其监测的实时性和空间粒度精细化程度不够,在复杂场景下难以应用。
技术实现思路
1、本发明针对现有技术受限于数据采集成本、数据精度和数据敏感性等因素造成的实时路况监测精度不够的问题,提出基于卡口车牌识别数据的实时路况监测系统及其方法。
2、为实现上述目的,本发明通过以下技术方案实现:
3、一种基于卡口车牌识别数据的实时路况监测方法,包括如下步骤:
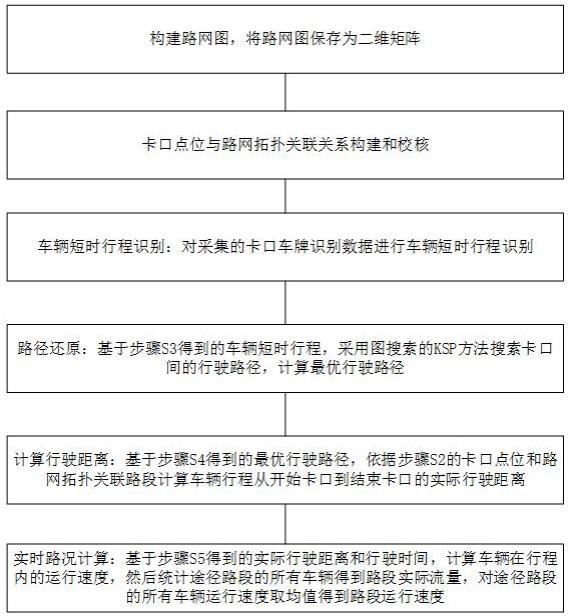
4、s1、构建路网图:基于路网地理信息图层文件数据将路网构建为路网图,路网图中的节点表示路段交叉口,路网图中的有向边表示路段,有向边的方向表示路段行驶方向,有向边的权重表示路段的长度,最终将路网图保存为二维矩阵;
5、s2、卡口点位与路网拓扑关联路段构建和校核:采集卡口基础信息地理数据,卡口车牌识别数据,将采集卡口基础信息地理数据形成卡口点位数据,然后基于步骤s1构建的路网图、卡口点位数据、卡口车牌识别数据构建卡口点位与路网拓扑关联路段,并进行校核;
6、s3、车辆短时行程识别:对采集的卡口车牌识别数据进行车辆短时行程识别;
7、s4、路径还原:基于步骤s3得到的车辆短时行程,采用图搜索的ksp方法搜索卡口间的行驶路径,计算最优行驶路径;
8、s5、计算行驶距离:基于步骤s4得到的最优行驶路径,依据步骤s2的卡口点位和路网拓扑关联路段计算车辆行程从开始卡口到结束卡口的实际行驶距离;
9、s6、实时路况计算:基于步骤s5得到的实际行驶距离和行驶时间,计算车辆在行程内的运行速度,然后统计途径路段的所有车辆得到路段实际流量,对途径路段的所有车辆运行速度取均值得到路段运行速度。
10、进一步的,步骤s1的具体实现方法包括如下步骤:
11、s1.1、设置路网地理信息图层文件数据中的字段名称和字段含义为:link_id表示路段编号,from_node表示路段拓扑起点编号,to_node表示路段拓扑终点编号,dir表示路段方向,length表示路段长度,geomtery表示地理坐标;
12、s1.2、设置路段方向为拓扑正向的路段,from_node字段和to_node字段内容保持不变,路段方向为拓扑反向的路段,对from_node字段和to_node字段内容进行互换,路段方向为拓扑双向的路段,将其设置为拓扑正向和拓扑反向两个路段,设置为拓扑正向的路段,from_node字段和to_node字段内容保持不变,设置为拓扑反向的路段,对from_node字段和to_node字段内容进行互换;
13、s1.3、将from_node字段作为二维矩阵的行序,to_node字段作为二维矩阵的列序,路段长度length作为二维矩阵的行序和列序位置的值,将路网图保存为二维矩阵。
14、进一步的,步骤s2的具体构建方法包括如下步骤:
15、s2.1、检查卡口点位数据和路网地理信息图层文件数据是否在同一坐标系下,不在同一坐标系下的转换到wgs84坐标系;
16、s2.2、基于同一坐标系下的卡口点位数据和路网地理信息图层文件数据,进行筛选卡口关联路段的候选路段;
17、s2.3、基于采集的卡口车牌识别数据、步骤s1构建的路网图,利用图路径搜索方法判断车辆在连续经过的卡口的候选路段是否存在连通路径,判断为是则标记存在连通路径的卡口的候选路段为卡口的关联路段,判断为否则标记不存在连通路径的卡口为点位异常卡口;
18、s2.4、基于路网地理信息图层文件数据中的路段拓扑方向和卡口点位数据的属性信息人工校核步骤s2.3标记的点位异常卡口;
19、s2.5、选择不同的卡口车牌识别数据重复步骤s2.3和s2.4,直至点位异常卡口的个数为0。
20、进一步的,步骤s2.2的具体实现方法包括如下步骤:
21、s2.2.1、在wgs84坐标系下,设置两点的经纬度坐标为(x1,y1),(x2,y2),地球半径r为6371km,两点间距离 d基于半正矢公式进行计算,将两点间距离 d的计算公式标记为 f(x1,y1,x2,y2),则计算公式为:
22、;
23、其中,a为半正矢公式中间计算结果;
24、s2.2.2、选取卡口wgs84坐标系附近500米范围的所有路段作为备选路段,设置备选路段 l的空间坐标由 n个经纬度坐标表示,则第i个备选路段,i为n中的任意一个,设置卡口的经纬度坐标为( x0 ,y0),则卡口到第i个备选路段间的距离的计算公式为:
25、;
26、则得到卡口到备选路段 l的最短距离的计算公式为:
27、;
28、s2.2.3、基于步骤s2.2.2计算的卡口和所有备选路段的距离及卡口到备选路段 l的最短距离,筛选距离卡口最近的前 k个路段作为卡口关联路段的候选路段,并按照距离升序排列后记为{ l1, l2,…, l k},其中 k<10;
29、s2.2.4、对所有卡口重复步骤s2.2.1-s2.2.3,获得所有卡口的关联路段的候选路段。
30、进一步的,步骤s2.3的具体实现方法包括如下步骤:
31、s2.3.1、将采集的卡口车牌识别数据,按照车牌分组;
32、s2.3.2、设置同一辆车连续经过的两个卡口为卡口 c和卡口 d,设置卡口c的候选路段为,为卡口c的第i个候选路段,卡口 d的候选路段为,为卡口 d的第j个候选路段;
33、s2.3.3、依次选择作为开始路段和结束路段,基于图路径搜索方法在步骤s1中构建的路网图上确认开始路段和结束路段是否连通,如果路段连通,则将路段作为卡口c的关联路段,将路段作为卡口d的关联路段;如果所有的候选路段之间不存在连通路径,则标记卡口c和d为点位异常卡口。
34、进一步的,步骤s3的具体实现方法包括如下步骤:
35、s3.1、数据清洗:对时间异常、车牌异常、重复记录的卡口车牌识别数据进行删除,得到数据清洗后的卡口车牌识别数据;
36、s3.2、动态统计卡口间的标准行程时间:基于一段时间内的卡口车牌识别数据,统计卡口间的行程时间,设置m个车辆经过卡口c和卡口d的行程时间记为,将卡口c和卡口d的行程时间的中位数作为卡口c和卡口d的标准行程时间,统计所有卡口间的标准行程时间,对于城市按高峰时段卡口数据和平峰时段卡口数据分别统计卡口间的标准行程时间;
37、s3.3、短时行程分割:将所有车辆的车牌记录按照车牌分组处理,对单辆车的所有记录,按记录时间排序后计算两个连续卡口之的行程时间,若单辆车在两个连续卡口间的行程时间小于卡口间的标准行程时间的1.10-1.20倍,则以开始卡口、开始时间、结束卡口和结束时间为标记数据记录该辆车该段行程为有效行程,否则记录该辆车在该时间段内存在非正常行驶状态,该辆车该段行程为无效行程,不予记录;
38、s3.4、实时数据的车辆短时行程处理:设置卡口路况监测以15min作为一个时间片,用时间片切分实时数据,当出现车辆通过的连续两个卡口切分到不同时间片时,采集车辆在上一时间片内的通过卡口记录,判断上一时间片的通过卡口和当前时间片的通过卡口之间的行程否为有效行程,行程有效时合并上一时间片卡口记录到当前时间片。
39、进一步的,步骤s4的具体实现方法包括如下步骤:
40、s4.1、车辆行程路径匹配:基于步骤s3得到的车辆行程的卡口点位数据,通过步骤s2得到的卡口点位与路网拓扑关联关系确定车辆行程起始路段和结束路段,通过图搜索的ksp方法在步骤s1得到的路网图上搜索行驶路线;
41、s4.2、利用图搜索的ksp方法搜索出的距离最短的前 m条路径,计算路径的选择概率,然后将选择概率最大的路径作为最优行驶路径,路径的选择概率的计算公式为:
42、;
43、其中, cost i是路径 i的选择成本, m为ksp算法搜索出的路径个数, n为路径 i中的路段总数量,,是路径 i中路段 j的等级系数,在高速路、快速路和主干路分别取值为1.0、1.2、1.4,其余道路取值为1.5, length ij为路径 i中路段 j的长度; p i为 i路径的选择概率, θ为路径选择成本系数,选择 p i最大的路径作为最优行驶路径。
44、进一步的,步骤s5中车辆行程从开始卡口到结束卡口的行驶距离计算方法为:
45、s5.1、设置步骤s4中输出的最优车辆行驶路径为,其中为开始路段,
46、为结束路段,车辆行程开始卡口坐标为( x begin, y begin),结束坐标为( x end, y end);
47、s5.2、车辆在开始卡口和结束卡口之间实际行驶距离的计算公式为:
48、;
49、;
50、;
51、;
52、;
53、其中, length begin为开始路段实际行驶距离, length end为结束路段实际行驶距离, length i为中间路段的实际行驶距离,( x 1q ,y 1q)为开始卡口和路段 l1中距离最近的坐标点,( x pq ,y pq)为结束卡口和路段 l p中距离最近的坐标点。
54、基于卡口车牌识别数据的实时路况监测系统,包括存储器和处理器,存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述的基于卡口车牌识别数据的实时路况监测方法的步骤。
55、本发明的有益效果:
56、本发明所述的一种基于卡口车牌识别数据的实时路况监测方法,综合考量了现有的数据采集方案和路网监测需求,提出了基于车牌识别数据(卡口电警数据/高速etc数据)的道路运行路况监测方案,依托路网现有车牌识别数据,同路网数据进行融合,综合考虑监测精度和计算压力,以达到监测精度高、实时性强、高效计算目的。
57、本发明所述的一种基于卡口车牌识别数据的实时路况监测方法,基于卡口车牌识别数据,结合短时行程识别、路径匹配技术和道路实时路况指标计算技术,提出了一种道路实时路况监测框架,包括完整的自动化路况计算方法,并在甘肃高速路网上进行了实证分析,验证了实时路况监测效果和系统性能。
58、本发明所述的一种基于卡口车牌识别数据的实时路况监测方法,依托于道路现有卡口基础设施,无需新增数据采集方案,路网运行监测成本低;所需数据明确,参数含义明确,支持标准化部署到实际应用场景。
- 还没有人留言评论。精彩留言会获得点赞!