一种基于智能发光标线的交叉口右转车碰撞预警方法与流程
本发明属于车路协同技术实施路口风险预警,具体涉及一种基于智能发光标线的交叉口右转车碰撞预警方法。
背景技术:
1、道路交叉口是城市交通系统的重要枢纽,承载各类机动车辆与非机动车、行人的汇集、转向和疏散的重要功能。同时,交叉口也是交通行为冲突点和交通事故多发点的汇聚区域。据世界范围内的统计,城市道路上发生的交通事故中,道路交叉口事故的占比高达30%-80%。我国近些年的交通事故统计数据表明,道路交叉口事故依然有逐年逐渐上升的态势。
2、由于我国大多数路口的右转车道不设置右转保护相位,在路口车流量较大时,右转车辆存在左侧视觉盲区,驾驶者无法及时看到侧向远距离高速行驶的直行车辆,经常出现直行车辆与右转车辆争抢车道的情况,经常导致碰撞事故发生。
3、另一方面,目前我国已经有部分城市在路口应用了发光标线设施,然而该设施的作用主要是增加夜间机动车与行人对道路的视距可达性,提醒机动车驾驶员和非机动车以及行人礼让通行,其设施的潜在预警能力没有得到充分应用。
技术实现思路
1、为了降低交叉路口右转车与侧向直行车的碰撞风险,本发明基于车路协同的技术,提出了一种基于智能发光标线的交叉口右转车碰撞预警方法。
2、为实现上述目的,本发明提供如下技术方案:一种基于智能发光标线设施的交叉口碰撞预警方法,其步骤包含:
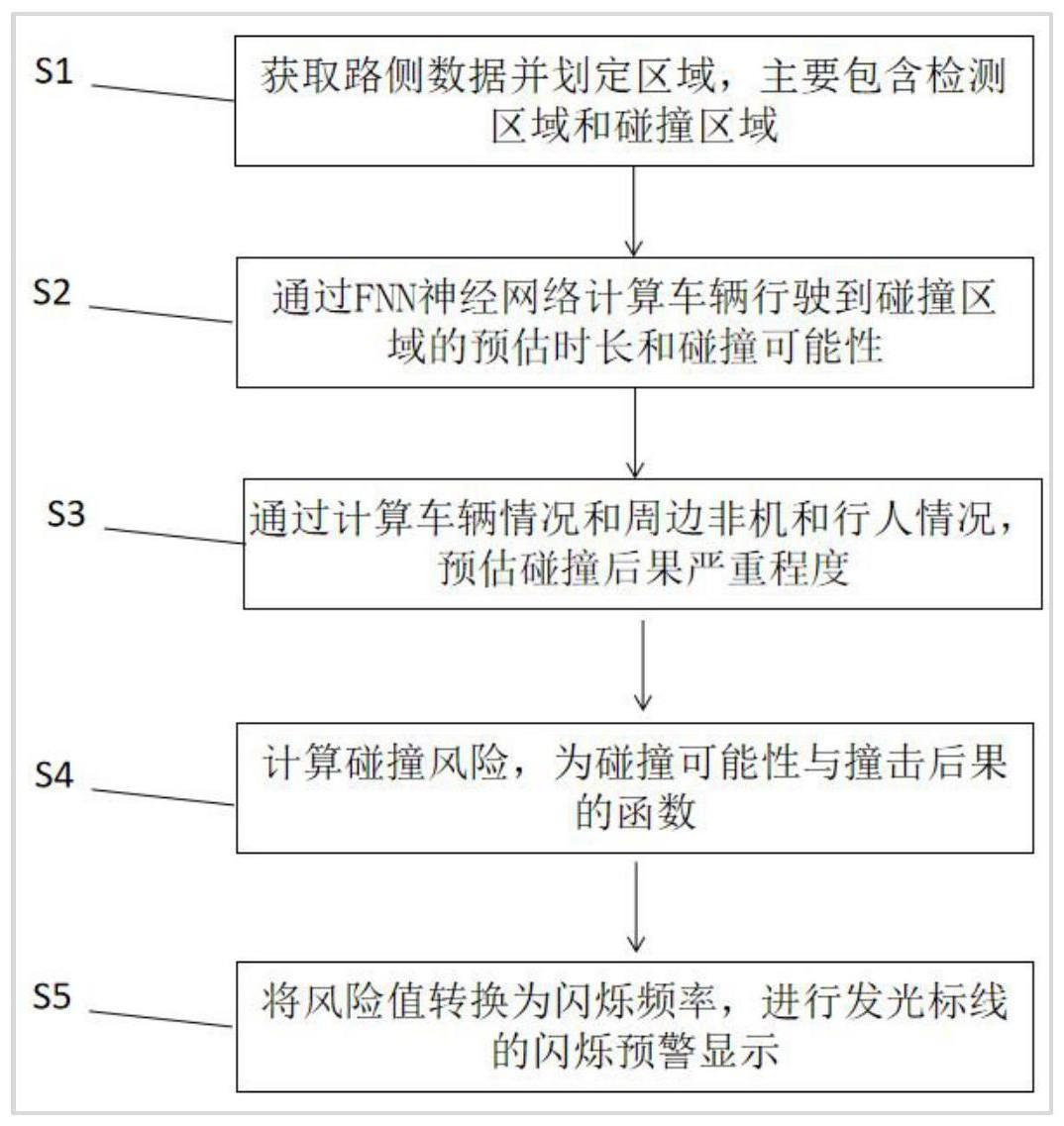
3、s1、获取路侧数据并划定区域,主要包含检测区域和碰撞区域。
4、s2、通过fnn神经网络计算车辆行驶到碰撞区域的预估时长和碰撞可能性。
5、s3、通过综合计算车辆情况和周边情况,预估碰撞后果严重程度值。
6、s4、计算碰撞风险,为两车碰撞区域的碰撞概率与预估撞击后果严重程度值的函数。
7、s5、将风险值转换为闪烁频率进行发光标线的闪烁预警。
8、其中,s1所述的获取数据包含:通过路侧rsu,车载obu,以及车联网数据中心获取路口所有行车的车速,红绿灯实时配时状态,路口的实际工程尺寸等。
9、进一步的,步骤s1所述的检测区域存在两种划定方式:
10、当直行向信号灯为绿灯时,直行道检测范围为长度da的区域,和右转道检测长度范围为db的区域。
11、当直行向信号灯为黄灯和路口全红时,即车道路权即将交替时,由于存在驾驶者闯黄灯加速导致事故发生的情况,直行道检测范围扩大为长度d'a的区域,右转道检测范围依然为db的区域。
12、上述的da,d'a和db的最大限制值为来向车可见标线闪光状态下的最远距离,该距离值因为车道的情况和天气,时间造成的视距情况的变化而变化。
13、所述步骤s1的碰撞区域为一长方形矩形区域,其中,其划定方式如下:
14、碰撞区域area_col的宽度设置为直行车道宽度w;
15、碰撞区域area_col的长度设置为该直行车在当前速度下的制动距离dist_stop,其计算公式为:
16、
17、其中,v为车辆实时速度,t_react为驾驶员反应时长,g为重力加速度(9.8m/s^2),μ为车道的摩擦系数。
18、碰撞区域的长度和宽度确定后,通过确定该区域任一顶点的坐标确定整个碰撞区域的坐标范围。
19、具体的,选择直行车道延长线与右转车运行轨迹左边界的第一最近交接点作为碰撞区域的顶点a,其坐标(a_xpos,a_ypos)计算方式如下:
20、a_ypos坐标值即为直行车道延长线的y向坐标。
21、a_xpos坐标值计算公式如下:
22、
23、其中:
24、l为直行车车长;
25、ψ为车辆转弯转向角;
26、p_xpos和p_ypos为虚拟转弯轴心p的坐标;
27、所述s2中,建立全连接神经网络计算车辆行驶到碰撞区域的预估时长和碰撞可能性。其中,计算包含的步骤为:
28、构建输入层为车辆和车道的参数,输出为预估行驶时长的神经网络。
29、其中,输入层包含6个输入点,分别为当前车速v,当前车加速度a,当从路口停止线与当前车之间的车辆数目n,车辆距离碰撞风险区域几何中心点o的距离s,当前车道的路权剩余时间g_dur,车道的宽度w_lane。
30、其中,隐藏层设置为两层,其中第一层的神经元数目为7个,第二层神经元数目为4个。
31、输出层为预估行驶时长t_pred的单个神经元。
32、搭建隐藏层和输出层的激活函数,具体的,采用relu激活函数,其公式如下。
33、f(x)=max(0,x)
34、搭建损失函数,具体的,采用huberloss损失函数,其公式如下:
35、
36、其中,δ为超参数,当|y-f(x)|≤δ时huberloss接近mse;当|y-f(x)|≥δ时,huberloss变成了类mae。huberloss减小了对离群点的敏感度问题,具有处处可导的特性。
37、定义优化器,具体的,采用小批量梯度下降法mbgd。
38、每次选择l个样本,则loss function公式抽象为:
39、
40、利用loss函数来更新权重参数的公式:
41、
42、通过车联网的历史数据训练神经网络,生成直行车预估时长模型modela和右转车预估时长模型modelb。
43、通过预估行驶时长计算两车同时进入碰撞区域的可能性。
44、
45、其中,ta、tb分别为直行车和右转车到达碰撞区域的预估时间。δt为预设超参数,代表所能接纳的两车最大时间差。
46、所述步骤s3中的碰撞后果预估严重程度值,其计算公式为:
47、
48、其中,f为表征直行车a动能和右转车b动能大小的影响函数,k为两车载客人数的影响函数,g和z分别为碰撞区域周边限定范围内行人数量和非机动车数量的影响函数。
49、所述步骤s4中,计算i时刻直行车和右转车的碰撞风险,其计算公式如下:
50、
51、其中i为指定的时刻,λ为修正常数,p为碰撞可能性,s为碰撞预估后果严重程度值。
52、所述步骤s5中,将风险值转换为闪烁频率进行智能标线的闪烁预警,其闪烁频率的计算公式为:
53、freblink=ri*μ
54、其中,ri为上述步骤s4所计算的第i时刻的预估风险,μ为转换系数。
技术特征:
1.一种基于智能发光标线的交叉口右转车碰撞预警方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s1中所述的获取路侧数据,其特征在于:获取的数据内容包含:
3.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s1中所述的划定区域,包含检测区域,其特征在于:包括:
4.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s1中所述的划定区域,包含碰撞区域,其特征在于:包括:
5.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s2中所述的通过fnn神经网络计算车辆行驶到碰撞区域的预估时长,其特征在于:包括:
6.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,所述的计算碰撞可能性,其特征在于:包括其计算公式:
7.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s3中所述的预估碰撞后果严重程度,其特征在于:包括其计算公式:
8.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s4中所述的计算指定时刻直行车和右转车的碰撞风险,其特征在于:包括其计算公式:
9.根据权利要求1所述的一种基于智能发光标线的交叉口右转车碰撞预警方法,如s5中所述的将风险值转换为闪烁频率进行发光标线的闪烁,其特征在于:闪烁频率的计算公式为:
技术总结
本发明公开了一种基于智能发光标线的交叉口右转车碰撞预警方法,具体涉及车路协同交叉口风险预警领域,包括:通过路侧设备和车载设备和车联网数据库中心的数据,划定路口的检测区域和碰撞区域;通过训练完成的神经网络迅速预估直行车和右转车发生碰撞的预估时长从而得到碰撞可能性大小;根据两车动能以及载客数量和周边行人数量以及非机动车数量,计算预估碰撞后的撞击后果严重程度值;根据碰撞可能性和预估的撞击后果严重性,计算得到预估的碰撞风险;最后将碰撞风险值映射为智能发光灯的闪烁频率,对直行车和右转车同时进行信号闪烁预警。本发明能够减少交叉路口直行车和右转车的碰撞事故率,提高路口交通的安全。
技术研发人员:解冰岩,宋风坤,张方伟,张兴林,孙正亮,林鹏
受保护的技术使用者:山东汉鑫科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!