一种基于激光雷达的车路协同控制系统的制作方法
本发明涉及无线导航,特别涉及一种基于激光雷达的车路协同控制系统。
背景技术:
1、随着人工智能技术的发展,无人驾驶应运而生,人们对车辆驾驶安全要求越来越高,通过技术手段实现智能化安全驾驶,成为一种有效的手段。在园区或者飞行区等一些特定场所,特种车辆的驾驶往往存在着诸多视野盲区,导致驾驶安全事故频发,通过技术手段预防驾驶安全事故的发生成为当务之急。
2、申请号为201710519632.2的专利公开了一种关于路径检测的车辆安全停靠定位系统,包括车座、车门、车尾部、发动机、驾驶室,以及gps导航模块,所述驾驶室上方车顶位置设置高位探测柱,驾驶室前方的前车保险杠底部安装红外摄像机;驾驶室内部设置触摸显示屏;其中,显示屏内侧设置处理器,所述车座设置按键模块;所述红外摄像机:探测前方路况,发送路况灰度图到处理器;所述高位探测柱:连接摄像头,探测前方路标发送路标信息至处理器;所述按键模块:包括多个按键,每一个按键对应一个目的地;所述按键模块发送目的地信息到处理器;所述处理器:接收红外摄像机和高位探测柱发送的路况灰度图、路标信息;根据调节模块,发出移动指令到方向控制模块、发出减速指令到车轮传感器。该系统应用于无人驾驶存在以下缺点:该系统主要是以gps定位信息作为停靠位置的依据,因此该系统的精确度很难得到保证,由于gps信号收外界环境影响很大,而且容易出此现数米的误差,因此安全性得不到保证。
技术实现思路
1、本发明提供一种基于激光雷达的车路协同控制系统,合理安排车辆的行驶路径和行驶姿态,实现智能车路协同,从而保证无人驾驶车辆的安全驾驶。
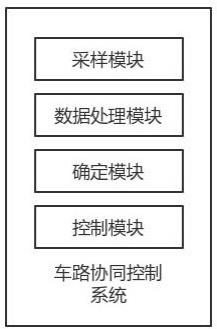
2、一种基于激光雷达的车路协同控制系统,包括:
3、采样模块,用于基于激光雷达,对车辆周围的路况进行采样,得到路况点云数据;
4、数据处理模块,用于对路况点云数据进行处理,得到车辆周围的车道及车道上的其他车辆位置信息;
5、确定模块,用于基于车辆周围的车道及车道上的其他车辆位置信息,确定当前车辆与周围车辆的相对角度和相对距离,建立车辆分布坐标图;
6、控制模块,用于基于车辆分布坐标图,确定当前车辆的行驶路径,基于行驶路径,控制当前车辆的控制输出量。
7、优选的,采样模块,包括:
8、确定单元,用于根据车辆的导航地图,获取扫描路段和在扫描路段的虚拟物体模型,并确定虚拟物体模型的初始位置;
9、扫射单元,用于基于虚拟物体模型的初始位置,确定激光雷达的扫射角度,并每隔预设时间,利用激光雷达,对扫描路段进行扫射,得到路况点云数据。
10、优选的,数据处理模块,包括:
11、划分单元,用于基于路况点云数据的三维点特征与虚拟物体模型特征的匹配度,将路况点云数据划分为多组点云数据集合;
12、选取单元,根据虚拟物体模型的外形特征和对应的点云数据集合,从点云数据集合中选取出表示虚拟物体模型对应的中心点云数据作为车辆位置信息;
13、车道确定单元,用于基于车辆位置信息,确定路况车道的车辆分布,得到车道信息。
14、优选的,车道确定单元,包括:
15、获取单元,用于从多组点云数据集合获取其他点云数据集合;
16、分析单元,用于根据其他点云数据集合与车辆位置信息的中心点云数据进行分析,确定其他点云数据集合对应的第二中心点云数据;
17、信息确定单元,用于基于中心点云数据和第二中心点云数据,确定路况车道的车辆分布,得到车道信息。
18、优选的,确定模块,包括:
19、角度确定单元,用于根据激光雷达在当前车辆的安装位置,确定激光雷达相对于当前车辆的第一方向余弦和第一相对位置角度;
20、角度确定单元,还用于根据激光雷达的发射角度阵列,确定激光雷达相对于水平面的第二方向余弦和第二相对位置角度;
21、参数确定单元,用于基于第一方向余弦和第一相对位置角度、第二方向余弦和第二相对位置角度确定激光雷达的标准反射参数;
22、初步估计单元,用于基于车辆周围的车道及车道上的其他车辆位置信息,初步估计当前车辆与周围车辆的第一相对角度和第一相对距离;
23、精确估计单元,用于基于当前车辆向其他车辆发射的对应激光雷达在射角度阵列中的阵列位置,从标准反射参数中确定对应的目标标准反射参数,并根据目标标准反射参数,对第一相对角度和第一相对距离进行修正,得到目标相对角度和目标相对距离;
24、坐标确定单元,用于基于车辆周围的车道及车道上的其他车辆位置信息中的中心点云数据,确定车道分布坐标图和当前车辆在车道分布坐标图中的位置坐标,并基于目标相对角度和目标相对距离,在车道分布坐标图确定其他车辆的坐标位置,得到车辆分布坐标图。
25、优选的,参数确定单元,包括:
26、参数获取单元,用于获取激光雷达的实际反射参数,并确定激光雷达的干扰系数;
27、计算单元,用于基于实际反射参数,结合干扰系数、第一方向余弦和第一相对位置角度、第二方向余弦和第二相对位置角度确定激光雷达的标准反射参数。
28、优选的,精确估计单元,包括:
29、修正单元,用于根据确定第一相对角度的相关激光雷达,并确定相关激光雷达对第一相对角度的影响函数,基于目标标准反射参数,对影响函数进行修正,得到目标影响函数;
30、计算单元,用于根据目标影响函数重新计算角度,得到目标相对角度。
31、优选的,控制模块,包括:
32、路径确定单元,用于根据当前车辆的目的地,结合道路拥堵信息,确定当前车辆的初始行驶路径;
33、预测单元,用于根据车辆分布坐标图,确定当前车辆在初始行驶路径下与其他车辆的坐标距离值和坐标角度值,并根据坐标距离值和坐标角度值预测当前车辆在初始行驶路径下的预测行驶宽度、预测行驶速度、预测行驶姿态角和预测行驶转向角;
34、控制值确定单元,用于基于预测行驶宽度、预测行驶速度、预测行驶姿态角和预测行驶转向角,结合车道参数,确定当前车辆的导向控制值;
35、输出量确定单元,用于判断导向控制值是否大于预设控制值,若是,基于初始行驶路径,确定当前车辆的自动控制输出量;
36、否则,基于导向控制值与预设控制值的差异大小,对初始行驶路径进行调整,得到目标行驶路径,并基于目标行驶路径,确定当前车辆的自动控制输出量。
37、优选的,输出量确定单元,包括:
38、模型建立单元,用于根据当前车辆的车辆参数信息和初始行驶路径,建立车辆行驶模型,根据当前车辆的导航控制系统的控制参数,建立导航控制模型;
39、关系确定单元,用于获取控制参数与行驶特征之间的第一映射关系,获取初始行驶路径和行驶特征之间的第二映射关系,基于第二映射关系对第一映射关系进行针对初始行驶路径的修正,得到标准映射关系;
40、模型融合单元,用于根据标准映射关系,将车辆行驶模型和导航控制模型进行融合,得到车辆控制模型;
41、输出量获取单元,用于将初始行驶路径对应的预测行驶宽度、预测行驶速度、预测行驶姿态角和预测行驶转向角输入车辆控制模型中,得到前车辆的自动控制输出量。
42、优选的,控制值确定单元,包括:
43、信息提取单元,用于基于车道参数,从安全驾驶数据库中提取满足车道参数的最佳规范行驶参数;
44、控制值计算单元,用于根据预测行驶宽度、预测行驶速度、预测行驶姿态角和预测行驶转向角与最佳规范行驶参数之间的差异,计算得到当前车辆的导向控制值。
45、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
46、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!