基于多元时空数据的分心驾驶风险路段识别与管控方法
本发明属于道路驾驶安全监管,具体涉及一种基于多元时空数据的分心驾驶风险路段识别与管控方法。
背景技术:
1、随着社会不断发展,汽车需求量和实用量逐渐增多,驾驶汽车时总会出现各种影响交通安全的行为,其中分心驾驶在驾驶行为中尤为常见,在驾驶汽车过程中一旦驾驶员分心就极易导致交通事故。
2、汽车产业的高速发展以智能网联技术的不断普及,智能辅助安全驾驶需求日益增加;而驾驶事故中,因为驾驶员注意力不集中分心而导致的交通事故比逐年增加,通过智能辅助安全驾驶对驾驶行为进行检测和提醒的需求也越来越高。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的基于多元时空数据的分心驾驶风险路段识别与管控方法解决了传统管控方法仅着眼于车辆本身分心驾驶行为导致管控效率低、车辆传感设备依赖性高的局限的问题。
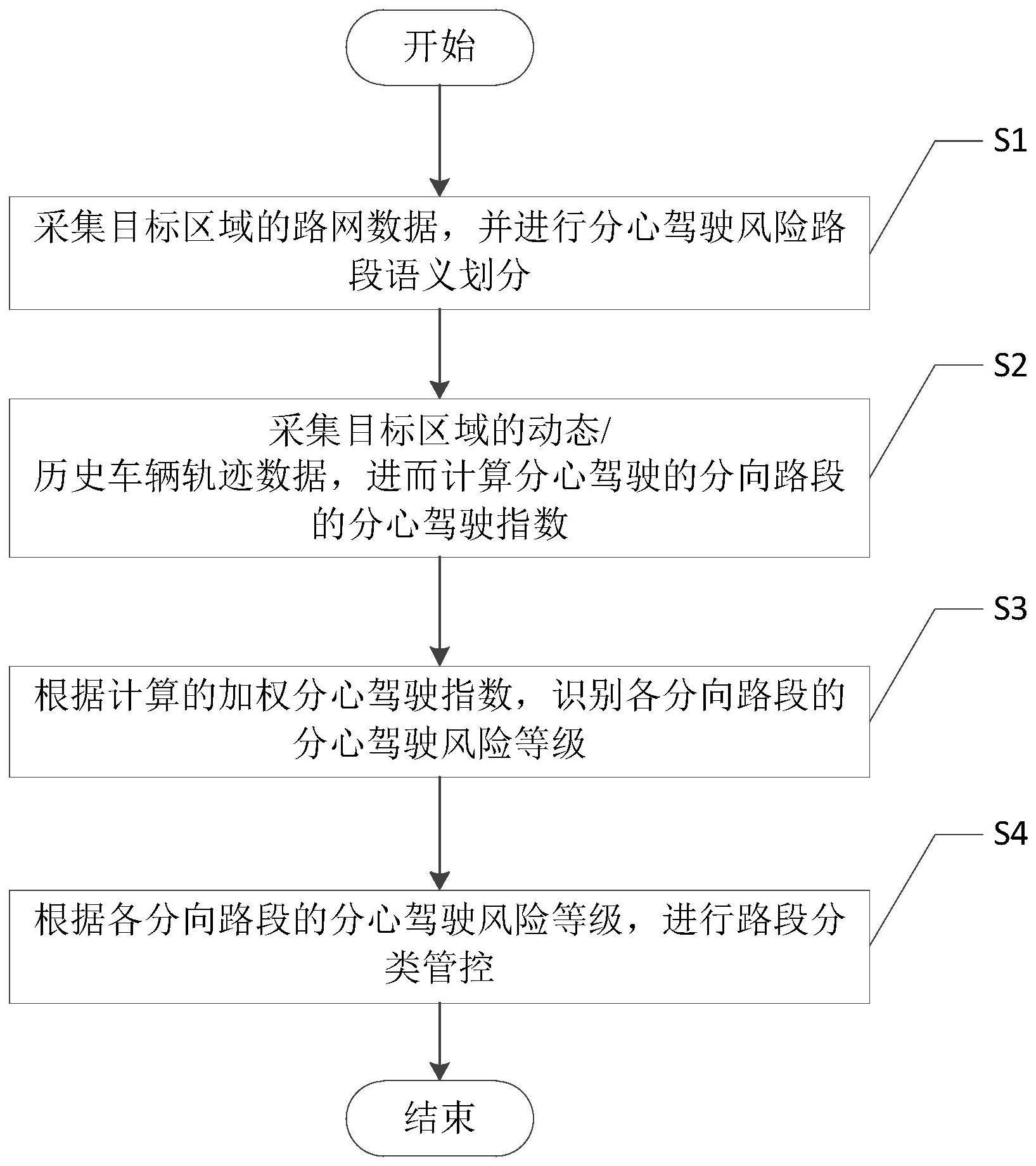
2、为了达到上述发明目的,本发明采用的技术方案为:基于多元时空数据的分心驾驶风险路段识别与管控方法,包括以下步骤:
3、s1、采集目标区域的路网数据,并进行分心驾驶风险路段语义划分;
4、s2、采集目标区域的动态/历史车辆轨迹数据,进而计算分心驾驶的分向路段的分心驾驶指数;
5、其中,分心驾驶指数包括追尾风险指数和轨迹线型突变指数;
6、s3、根据计算的加权分心驾驶指数,识别各分向路段的分心驾驶风险等级;
7、s4、根据各分向路段的分心驾驶风险等级,进行路段分类管控。
8、进一步地,所述步骤s1具体为:
9、s11、采集目标区域的路网数据,并修复异常路网数据,确定路网信息图;
10、s12、在路网信息图中,将100米以内的所有交汇口端点的形心识别为逻辑道路交叉口;
11、s13、对相邻两个逻辑道路交叉口之间的路段划分逻辑分向路段,实现分心驾驶风险管控路段的语义划分。
12、进一步地,所述步骤s13中划分逻辑分向路段的方法具体为:
13、s13-1、连接相邻两个逻辑道路交叉口,获得射线ab;
14、s13-2、根据射线ab的长度,划分逻辑分向路段,并进行路段编号;
15、当射线ab小于1公里时,将射线ab作为逻辑分向路段,并进行路段编号;
16、当射线ab大于1公里但小于2公里时,以射线ab中点进行切割划分,获得两段逻辑分向路段,并进行路段编号;
17、当射线ab大于2公里时,以逻辑道路交叉口a为起点,1公里为间隔对射线ab依次进行逻辑分向路段划分,直到最后一个划分点c至逻辑道路交叉口b的距离小于2公里时,以射线cb中点进行切割划分得到对应两段逻辑分向路段,对每个划分出的逻辑分向路段,依次进行路段编号;
18、其中,进行路段编号的方法为:
19、将逻辑道路交叉口a到b方向的逻辑分向路段依次编号为1,2,3,…,s,将逻辑道路交叉口b到a方向的逻辑分向路段依次编号为s+1,s+2,s+3,…,s+s;s为划分出的逻辑分向路段数量,s为正整数。
20、进一步地,所述步骤s2中,匹配分心驾驶的分向路段的方法具体为:
21、sa21、采集目标区域的动态/历史车辆轨迹数据,对其处理并分别构建各车辆的历史出行轨迹集合和动态出行轨迹集合;
22、sa22、遍历各车辆的历史/动态出行轨迹集合中的轨迹点数据;
23、sa23、对历史/动态出行轨迹集合中的轨迹点,获取其临近范围内的临近连接线集合;
24、sa24、对临近连接线集合不为空的轨迹点,遍历其对应的临近连接线集合,并确定该轨迹点的方位角射线与各临近连接线切线的夹角;
25、sa25、根据夹角大小,匹配分向路段:
26、当存在小于45度的夹角时,将最小夹角的临近连接线作为匹配连接线,其对应的虚拟分向路段作为匹配的分向路段;
27、当所有夹角均大于45度时,则若临近连接线最大夹角大于135度,则以该连接线对应分向路段的反向路段作为匹配的分向路段。
28、进一步地,所述步骤s2中,计算追尾风险指数的方法为:
29、a1、根据目标区域的路网数据,进行追尾驾驶路段语义划分;
30、a2、根据目标区域的动态/历史车辆轨迹数据,进行轨迹出行路径匹配,得到追尾风险分向路段;
31、a3、根据分心驾驶分的分向路段和追尾风险的分向路段的对应关系,对于每个分向驾驶的分向路段,在追尾风险的分向路段中划分与分心驾驶对应的路段;
32、a4、计算在追尾风险的分向路段中与分心驾驶对应的路段的追尾风险指数,作为该分心驾驶分向路段的追尾风险指数。
33、进一步地,所述步骤a4中,分心驾驶的分向路段j在时段t的追尾风险指数distractre(j,t)为:
34、distracre(j,t)=∑i∈ireindi(i,t)
35、式中,i为分心驾驶的分向路段j对应的追尾风险的分向路段集合,reindi(i,t)为追尾风险的分向路段i在时段t对应追尾风险指数;
36、其中,追尾风险reindi(i,t)为:
37、reindi(i,t)=w1*w2*w3*dindi
38、式中,w1为追尾风险分向路段的相对疲劳指数对应的相对疲劳风险等级权重,w2为追尾风险分向路段的绝对疲劳指数对应的绝对疲劳风险等级权重,w3为追尾风险分向路段的流量指数权重,dindi为追尾风险分向路段的急减速指数;
39、其中,相对疲劳指数对应的风险等级根据分向路段的相对疲劳指数进行1~10级的风险等级划分,绝对疲劳风险等级根据分向路段的绝对疲劳风险指数,按自然间断法分10级进行间断排序得到,流量指数权重根据动态时段平均车道流量所属范围确定。
40、进一步地,所述步骤s2中,计算轨迹线型突变指数的方法为:
41、b1、获取历史轨迹出现集合中各轨迹点对应的匹配连接线集合;
42、b2、基于匹配连接线集合,遍历同一分向路段中各车辆的出行轨迹;
43、b3、对于出行轨迹中的各轨迹点,选取连续位于同一分向路段的轨迹点及其前后点;
44、b4、根据选取的轨迹点及其前后点,计算对应的线型突变指数tracemutindi;
45、
46、式中,di和di+1分别为第i个轨迹点和第i+1个轨迹点至其邻近匹配连接线的垂直距离,hi为前后两个轨迹点之间的欧氏距离;
47、b5、将各分向路段中所有出行轨迹的线型突变指数平均值作为该分向路段的轨迹线型突变指数。
48、进一步地,所述步骤s3中,分心驾驶指数distractrisk为:
49、distractrisk=w1*w2
50、式中,w1为追尾风险指数对应风险等级的权重,其中,追尾风险指数对应风险等级根据追尾指数按照自然间断法分为1~10级,w2为轨迹线型突变指数对应轨迹突变等级的权重,轨迹突变等级根据追尾风险指数按照自然间断法分为1~10级。
51、进一步地,所述步骤s3中,识别分心驾驶风险等级的方法为:
52、根据当前时刻,筛选上一时段车辆采样数大于50次的分向路段,根据其对应的加权分心驾驶指数,按自然间断法分10级进行间断排序,获得各分向路段的分心驾驶风险等级。
53、进一步地,所述步骤s4中,进行路段分类管控的方法为:
54、对分心驾驶风险等级小于4的分向路段,不进行管控;
55、对分心驾驶风险等级为5~7的分向路段,联动电子导航地图进行提醒;
56、对分心驾驶风险等级为8~10的分向路段,对分向路段间隔1公里设置提醒标识,同时联动电子导航地图进行提醒;
57、对加权分心驾驶风险指数为目标区域内前100的分向路段,对分向路段间隔1公里设置提醒标识、联动电子导航地图进行提醒并设置临时休息区。
58、本发明的有益效果为:
59、(1)本发明实现了基于车辆历史轨迹、道路几何线型特征等多元时空数据分析的分心驾驶风险路段识别管控,包括基于道路结构特征的分心驾驶分析路段语义分割、基于历史轨迹及道路几何特征分析的加权分心驾驶指数统计(分心驾驶行为频率指数=追尾指数+轨迹线型突变指数)、分心驾驶风险路段分类识别,风险路段分类管控;
60、(2)本发明方法突破了传统管控方法仅着眼于车辆本身分心驾驶行为导致管控效率低、车辆传感设备依赖性高的局限;
61、(3)本发明方法可显著提高道路网络整体分心驾驶风险路段识别管控水平,降低相关事故风险。
- 还没有人留言评论。精彩留言会获得点赞!