交通违规的检测方法、云平台与路测控制器与流程
本技术涉及图像处理,具体而言,涉及一种交通违规的检测方法、云平台、路测控制器与交通违规检测系统。
背景技术:
1、面向城市的交通管理,通常是通过部署于各街道和/或十字路口的摄像头和/或激光雷达等设备,来检测道路中的各类违规事件。例如,闯红灯、超速以及逆行等等。
2、对于采用如摄像头此类的视觉设备进行违规检测的方法,通常是基于视频流传输与机器学习相结合的方案,通过对视频内容进行解析或者获取关键帧,来检测道路中的违规情况。对于采用摄像头与激光雷达相结合的方案,通常是通过摄像头拍摄的视频内容或者影像信息,以及激光雷达的感知信息,来检测道路中的违规情况。
3、上述的两种方法均未考虑到遮挡情况,例如,视角区域的前方存在的遮挡、物体互相之间的遮挡以及摄像头污垢等等。在遮挡的情况下,由于存在着视野盲区,导致对交通中的违规动作的检测,不仅准确率较低,还会存在漏检以及误报等问题。
技术实现思路
1、本技术的主要目的在于提供一种交通违规的检测方法、云平台、路测控制器与交通违规检测系统,以至少解决现有技术中因遮挡导致的对交通中的违规动作的检测的准确性较低的问题。
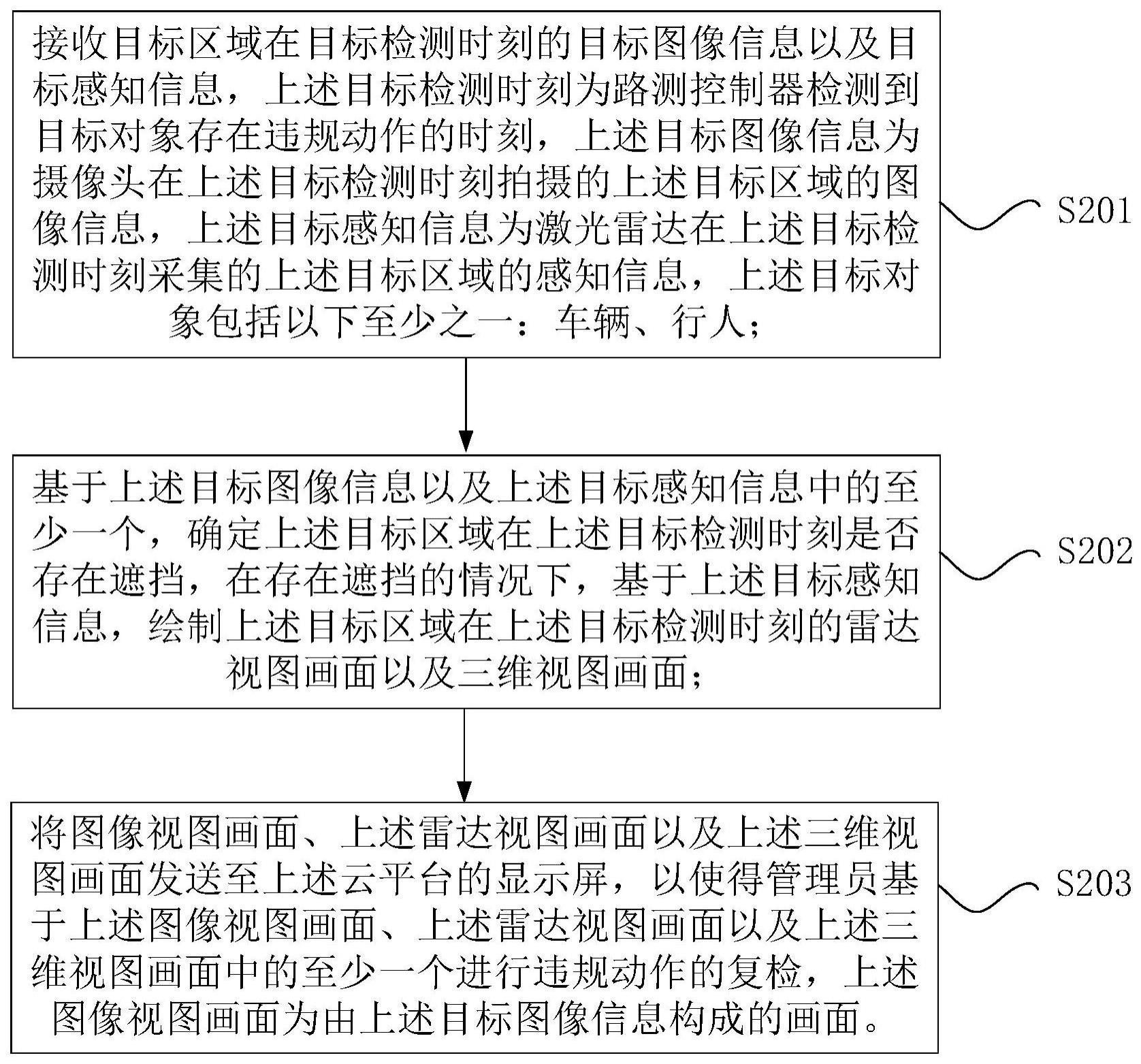
2、为了实现上述目的,根据本技术的一个方面,提供了一种交通违规的检测方法,所述检测方法应用于云平台,所述检测方法包括:接收目标区域在目标检测时刻的目标图像信息以及目标感知信息,所述目标检测时刻为路测控制器检测到目标对象存在违规动作的时刻,所述目标图像信息为摄像头在所述目标检测时刻拍摄的所述目标区域的图像信息,所述目标感知信息为激光雷达在所述目标检测时刻采集的所述目标区域的感知信息,所述目标对象包括以下至少之一:车辆、行人;基于所述目标图像信息以及所述目标感知信息中的至少一个,确定所述目标区域在所述目标检测时刻是否存在遮挡,在存在遮挡的情况下,基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面以及三维视图画面;将图像视图画面、所述雷达视图画面以及所述三维视图画面发送至所述云平台的显示屏,以使得管理员基于所述图像视图画面、所述雷达视图画面以及所述三维视图画面中的至少一个进行违规动作的复检,所述图像视图画面为由所述目标图像信息构成的画面。
3、可选地,基于所述目标图像信息以及所述目标感知信息中的至少一个,确定所述目标区域在所述目标检测时刻是否存在遮挡,包括以下至少之一:基于所述目标感知信息,确定所述目标对象在世界坐标系下的位置信息,基于所述世界坐标系下的所述激光雷达的位置信息以及所述目标对象的位置信息,确定所述目标区域在所述目标检测时刻是否存在遮挡;对所述目标图像信息进行目标检测,得到多个目标边界框,基于多个所述目标边界框,确定所述目标区域在所述目标检测时刻是否存在遮挡,所述目标边界框为目标物体在所述目标图像信息中的边界框,所述目标物体包括所述目标对象和其他物体,所述其他物体包括以下至少之一:建筑物、树木、非所述目标对象的车辆、非所述目标对象的行人。
4、可选地,基于所述世界坐标系下的所述激光雷达的位置信息以及所述目标对象的位置信息,确定所述目标区域在所述目标检测时刻是否存在遮挡,包括:基于所述激光雷达的位置信息以及所述目标对象的位置信息,构建所述激光雷达的位置信息以及所述目标对象的位置信息之间的直线线段;确定是否存在所述其他物体穿过所述直线线段;在存在所述其他物体穿过所述直线线段的情况下,确定所述目标区域在所述目标检测时刻存在遮挡;在不存在所述其他物体穿过所述直线线段的情况下,确定所述目标区域在所述目标检测时刻不存在遮挡。
5、可选地,基于多个所述目标边界框,确定所述目标区域在所述目标检测时刻是否存在遮挡,包括:确定任意两个所述目标边界框之间是否存在重叠;在任意两个所述目标边界框之间存在重叠的情况下,确定所述目标区域在所述目标检测时刻存在遮挡;在任意两个所述目标边界框之间不存在重叠的情况下,确定所述目标区域在所述目标检测时刻不存在遮挡。
6、可选地,所述检测方法还包括:在检测到所述目标区域在所述目标检测时刻存在遮挡的情况下,发送提示信息至所述显示屏,所述提示信息用于表征所述目标区域在所述目标检测时刻的存在遮挡。
7、可选地,基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面以及三维视图画面,包括:基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面;对所述雷达视图画面进行三维数字孪生,得到所述三维视图画面。
8、根据本技术的另一方面,提供了一种交通违规的检测方法,所述检测方法应用于路测控制器,所述检测方法包括:基于摄像头拍摄的目标图像信息以及激光雷达采集的目标感知信息,检测目标区域中的目标对象是否存在违规动作,所述目标对象包括以下至少之一:车辆、行人;在所述目标区域中的所述目标对象存在违规动作的情况下,将所述目标对象出现违规动作的时刻确定为目标检测时刻;将所述目标检测时刻对应的所述目标图像信息以及所述目标感知信息发送至云平台,以使得所述云平台基于所述目标图像信息以及所述目标感知信息中的至少一个,确定所述目标区域在所述目标检测时刻是否存在遮挡,在存在遮挡的情况下,基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面以及三维视图画面,且将图像视图画面、所述雷达视图画面以及所述三维视图画面发送至所述云平台的显示屏,从而使得管理员基于所述图像视图画面、所述雷达视图画面以及所述三维视图画面中的至少一个进行违规动作的复检,所述图像视图画面为由所述目标图像信息构成的画面。
9、可选地,所述云平台基于所述目标图像信息以及所述目标感知信息中的至少一个,确定所述目标区域在所述目标检测时刻是否存在遮挡的过程包括以下至少之一:基于所述目标感知信息,确定所述目标对象在世界坐标系下的位置信息,基于所述世界坐标系下的所述激光雷达的位置信息以及所述目标对象的位置信息,确定所述目标区域在所述目标检测时刻是否存在遮挡;对所述目标图像信息进行目标检测,得到多个目标边界框,基于多个所述目标边界框,确定所述目标区域在所述目标检测时刻是否存在遮挡,所述目标边界框为目标物体在所述目标图像信息中的边界框,所述目标物体包括所述目标对象和其他物体,所述其他物体包括以下至少之一:建筑物、树木、非所述目标对象的车辆、非所述目标对象的行人。
10、可选地,所述云平台基于所述世界坐标系下的所述激光雷达的位置信息以及所述目标对象的位置信息,确定所述目标区域在所述目标检测时刻是否存在遮挡的过程包括:基于所述激光雷达的位置信息以及所述目标对象的位置信息,构建所述激光雷达的位置信息以及所述目标对象的位置信息之间的直线线段;确定是否存在所述其他物体穿过所述直线线段;在存在所述其他物体穿过所述直线线段的情况下,确定所述目标区域在所述目标检测时刻存在遮挡;在不存在所述其他物体穿过所述直线线段的情况下,确定所述目标区域在所述目标检测时刻不存在遮挡。
11、可选地,所述云平台基于多个所述目标边界框,确定所述目标区域在所述目标检测时刻是否存在遮挡的过程包括:确定任意两个所述目标边界框之间是否存在重叠;在任意两个所述目标边界框之间存在重叠的情况下,确定所述目标区域在所述目标检测时刻存在遮挡;在任意两个所述目标边界框之间不存在重叠的情况下,确定所述目标区域在所述目标检测时刻不存在遮挡。
12、可选地,在所述云平台检测到所述目标区域在所述目标检测时刻存在遮挡的情况下,所述云平台发送提示信息至所述显示屏,所述提示信息用于表征所述目标区域在所述目标检测时刻的存在遮挡。
13、可选地,所述云平台基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面以及三维视图画面的过程包括:基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面;对所述雷达视图画面进行三维数字孪生,得到所述三维视图画面。
14、根据本技术的又一方面,提供了一种云平台,包括:第一接收单元,用于接收目标区域在目标检测时刻的目标图像信息以及目标感知信息,所述目标检测时刻为路测控制器检测到目标对象存在违规动作的时刻,所述目标图像信息为摄像头在所述目标检测时刻拍摄的所述目标区域的图像信息,所述目标感知信息为激光雷达在所述目标检测时刻采集的所述目标区域的感知信息,所述目标对象包括以下至少之一:车辆、行人;第一确定单元,用于基于所述目标图像信息以及所述目标感知信息中的至少一个,确定所述目标区域在所述目标检测时刻是否存在遮挡,在存在遮挡的情况下,基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面以及三维视图画面;第一发送单元,用于将图像视图画面、所述雷达视图画面以及所述三维视图画面发送至所述云平台的显示屏,以使得管理员基于所述图像视图画面、所述雷达视图画面以及所述三维视图画面中的至少一个进行违规动作的复检,所述图像视图画面为由所述目标图像信息构成的画面。
15、根据本技术的再一方面,提供了一种路测控制器,包括:检测单元,用于基于摄像头拍摄的目标图像信息以及激光雷达采集的目标感知信息,检测目标区域中的目标对象是否存在违规动作,所述目标对象包括以下至少之一:车辆、行人;第二确定单元,用于在所述目标区域中的所述目标对象存在违规动作的情况下,将所述目标对象出现违规动作的时刻确定为目标检测时刻;第三发送单元,用于将所述目标检测时刻对应的所述目标图像信息以及所述目标感知信息发送至云平台,以使得所述云平台基于所述目标图像信息以及所述目标感知信息中的至少一个,确定所述目标区域在所述目标检测时刻是否存在遮挡,在存在遮挡的情况下,基于所述目标感知信息,绘制所述目标区域在所述目标检测时刻的雷达视图画面以及三维视图画面,且将图像视图画面、所述雷达视图画面以及所述三维视图画面发送至所述云平台的显示屏,从而使得管理员基于所述图像视图画面、所述雷达视图画面以及所述三维视图画面中的至少一个进行违规动作的复检,所述图像视图画面为由所述目标图像信息构成的画面。
16、根据本技术的一方面,提供了一种交通违规检测系统,包括:云平台,所述云平台用于执行任意一种所述的交通违规的检测方法;路测控制器,与所述云平台通信,所述路测控制器用于执行任意一种所述的交通违规的检测方法。
17、应用本技术的技术方案,首先,路测控制器在检测到目标区域中的目标对象在目标检测时刻存在违规动作的情况下,将摄像头拍摄的目标区域在目标检测时刻的目标图像信息以及激光雷达采集的目标区域在目标检测时间的目标感知信息发送至云平台,云平台接收路测控制器发送的目标图像信息以及目标感知信息;然后,云平台基于目标图像信息以及目标感知信息中的至少一个,确定目标区域在目标检测时刻是否存在遮挡,在存在遮挡的情况下,基于目标感知信息,绘制目标区域在目标检测时刻的雷达视图画面以及三维视图画面;最后,云平台将图像视图画面、雷达视图画面以及三维视图画面发送至显示屏,这样管理员便可以基于显示屏上显示的图像视图画面、雷达视图画面和三维视图画面中的至少一个,对目标对象的违规动作进行再次复检。本方案的检测方法考虑了遮挡情形,且通过目标图像信息以及目标感知信息中的至少一个,确定目标区域在目标检测时刻是否存在遮挡,在存在遮挡的情况下,绘制目标区域在目标检测时刻的雷达视图画面以及三维视图画面,从而方便管理员可以快速地获取到目标区域在目标检测时刻的具体情形,保证了可以较为准确地确定出目标对象是否出现违规动作,避免了误报以及漏检的问题,进而解决了现有技术中因遮挡导致的对交通中的违规动作的检测的准确性较低的问题。
- 还没有人留言评论。精彩留言会获得点赞!