多种交通仿真融合的网联混驾编队一体化测试系统及方法
本发明涉及智能交通,特别地涉及一种多种交通仿真融合的网联混驾编队一体化测试系统及方法。
背景技术:
1、随着车辆智能化水平的不断提高,自动驾驶编队凭借多车辆协作行驶、减少各车辆间距,借助前车尾流减少后车空气阻力等优势,有望为提升交通运行安全性、生态性、顺畅性带来帮助。智能网联技术作为智能交通领域新兴技术,通过高精传感器、无线通信等技术采集前方交通状态和周围车辆运行信息,能够为驾驶人提供更好地驾驶决策辅助。智能网联技术的发展也为实现单车向多车协同的拓展提供有力技术支撑。将智能网联技术与自动驾驶编队结合能够双重提升交通运行整体效益。
2、受制于自动驾驶标准法规健全程度、新兴技术对于公众的普及程度等,部分用户目前尚不能完全信任自动驾驶技术。特别的,当编队内部各车辆均处于自动驾驶模式且编队队列处于较近跟车间距行驶情况下,跟驰车内的驾驶人及乘客即无法全面感知获取领航车前方交通状态又无法及时安全接管操控车辆时,多数驾驶人及乘客无法信任并接受领航车由自动驾驶模式行驶。因此,考虑当前网联自动驾驶编队发展现状,有必要考虑领航车由驾驶人操作的网联混驾编队模式。然而,由于每名驾驶人的个体属性、自身驾驶风格、日常驾驶习惯、对于新兴技术的接受态度和使用意愿均不相同,且由于在特殊事件下驾驶人个体行为不易预判等原因,尤其是网联条件和编队模式会对领航车驾驶人造成何种行为改变尚不清楚,对跟驰车行驶状态的演化传播影响亦不清晰,因此,有必要探究网联混驾编队综合运行特征及影响机理。综上,本发明提出一种多种交通仿真融合的网联混驾编队一体化测试系统及方法。
技术实现思路
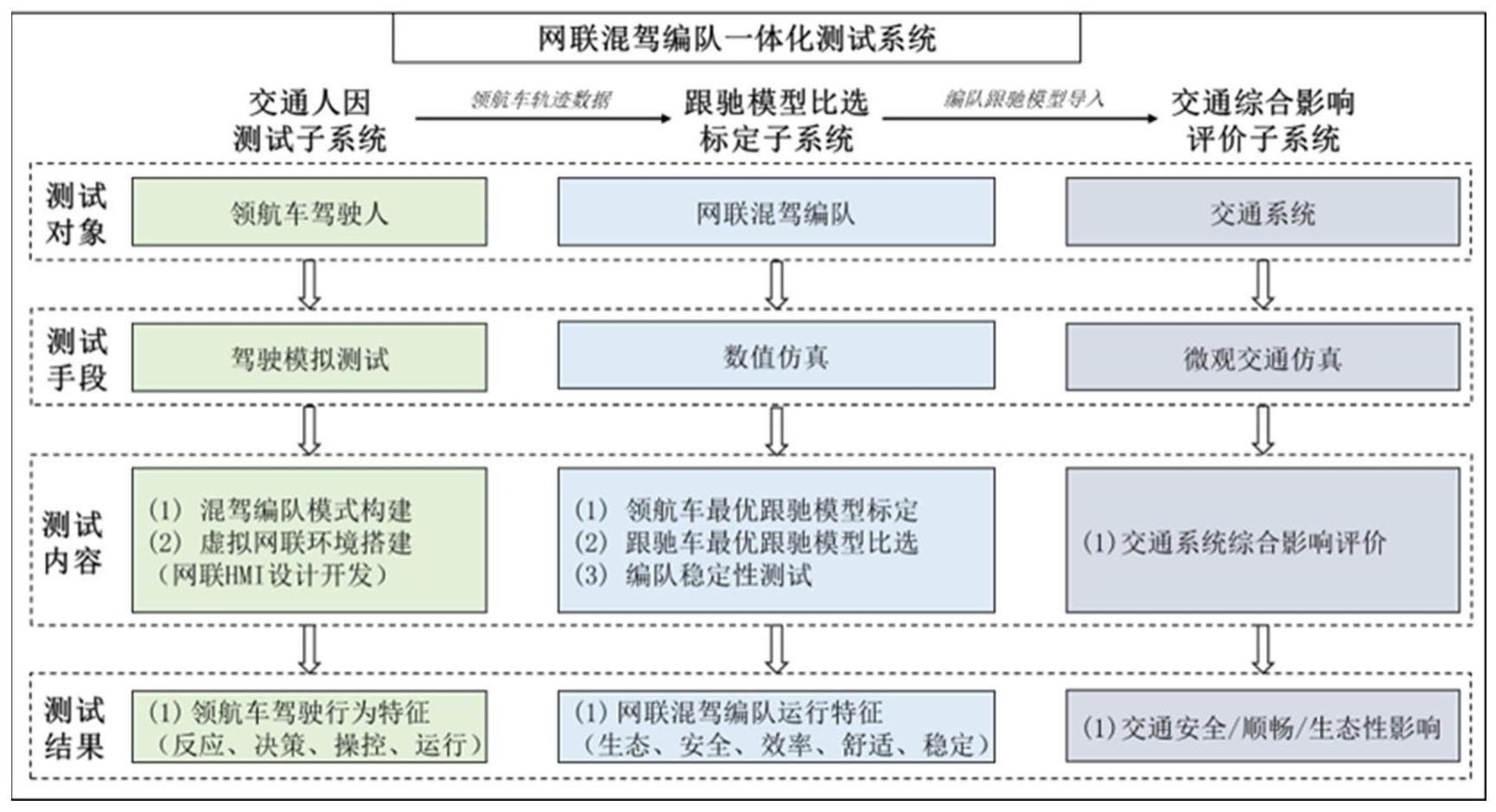
1、针对上述现有技术中的问题,本技术提出了一种多种交通仿真融合的网联混驾编队一体化测试系统,采用“领航车-网联人机交互终端+人工驾驶、跟驰车-网联自动驾驶跟驰模型”的网联混驾编队模式,包括网联混驾编队交通人因测试子系统、编队跟驰模型比选标定子系统、交通系统综合影响评价子系统三部分,通过融合驾驶模拟仿真、数值仿真和微观交通仿真三种技术,评测领航车个体驾驶行为特性(反应、决策、操控、运行)、网联混驾编队整体运行特征(生态、安全、效率、舒适、稳定)及对和交通系统影响(生态、安全、效率)。
2、优选地,网联混驾编队交通人因测试子系统,包括驾驶模拟系统、网联人机交互终端、数据协同处理中心和人因数据采集系统,用以构建网联混驾编队模式及虚拟网联驾驶环境,进而从驾驶行为反应、决策、操控、运行维度评测网联混驾编队中领航车驾驶人的驾驶行为特征。
3、优选地,编队跟驰模型比选标定子系统,以交通人因测试子系统中采集的领航车驾驶轨迹为基准,采用数值仿真方法模拟不同网联自动驾驶车辆跟驰模型作为跟驰车时的编队行驶状态,比选确定跟驰车最优跟驰模型;采用遗传算法对领航车轨迹进行特征提取,标定领航车跟驰模型;通过跟驰模型稳定性判别公式,确定最优混驾编队运行模式,进而从生态、安全、效率、舒适、稳定维度评测网联混驾编队整体运行特征。
4、优选地,交通系统综合影响评价子系统,将标定好的领航车跟驰模型和跟驰车跟驰模型导入至微观交通仿真软件,进而从编队规模、编队渗透率、不同混合交通流水平、交通安全性、交通顺畅性、交通生态性维度评价网联混驾编队对交通系统层面的影响,其中通过修定空气阻力系数和能耗排放系数,表征编队车辆与个体单车间的属性差异。
5、优选地,网联混驾编队模式中,驾驶模拟器的领航车由驾驶人操控驾驶,车辆设定为具备l2级以上辅助自动驾驶功能车辆,通过网联人机交互终端构建人车交互的网联环境;跟驰车通过自动驾驶车辆跟驰模型模拟跟驰状态,其中通过对跟驰模型中关键参数进行差异化设置实现跟驰车辆的网联与非网联状态表征。
6、优选地,编队跟驰模型比选标定子系统,从当前主流自动驾驶跟驰模型中选取跟驰领航车效果最优的跟驰车跟驰模型;对公式i至公式ⅲ的跟驰模型编程复现,并导入领航车轨迹数据,采用数值仿真方法模拟三个跟驰模型跟驰领航车的编队运行效果,通过公式ⅳ的动态规整算法比较三个模型与领航车轨迹的相似度,选取跟驰效果最好的跟驰模型作为跟驰车的跟驰模型;
7、acceleration=1.12*(δx-t*v)+1.70*δv (i)
8、acceleration=0.23*(δx-t*v)+0.07*δv (ⅱ)
9、acceleration=1.1*a+0.23*(δ*-t*v)+0.07*δv (ⅲ)
10、上式中,acceleration为跟驰车期望加速度,a为跟驰车当前加速度,δx为两车车头间距,t为当前车头时距,v为跟驰车当前速度,δv为两车车速差;
11、
12、上式中,dtw为跟驰车与领航车轨迹数据误差最小值,l为领航车轨迹数据,fn为第n辆跟驰车轨迹数据,k为轨迹点数量,wk为轨迹点对应数据。
13、优选地,领航车跟驰模型标定,采用跟驰模型标定方法对领航车驾驶行为进行特征提取,使跟驰模型具备编队领航车的驾驶行为特征;将领航车轨迹数据按照3:1的原则分配标定组和验证组,以公式v中的相对均方根误差(rmspe)作为拟合优度函数,使用遗传算法搜寻目标函数最优值以标定跟驰模型参数,;
14、
15、上式中,k为轨迹点数量;li为领航车轨迹数据,fi为跟驰车轨迹数据;
16、优选地,跟驰模型稳定性判别,通过对跟驰模型进行泰勒公式展开,得到跟驰模型稳定性判别式ⅶ,当判别式ⅶ结果>0时,判定跟驰模型稳定;
17、
18、上式中,fv为跟驰车速度变量系数,fδv为两车速度差变量系数,ft为车头时距变量系数。
19、优选地,编队跟驰车空气阻力系数修定与能耗排放公式系数修定,是指车辆编队行驶时由于车辆间车速较快且车间距较近,跟驰车的空气阻力系数会减小,亦使跟驰车能耗排放较领航车变小,因此需要对跟驰车的空气阻力系数与能耗排放公式系数重新标定;根据测试经验及文献梳理,编队中第二辆车的空气阻力系数约为头车的0.85倍,编队第三辆车的空气阻力系数约为头车的0.8倍,编队第四辆及更多的跟驰车空气阻力与第三辆车相似;因此,将跟驰车的空气阻力设定为:领航车为cd0;第一辆跟驰车的空气阻力系数cd1=cd0*0.85;第2辆至第i辆跟驰车的空气阻力系数cdi(i=2,3,4)=cd0*0.80;
20、
21、上式中,sn为两车间距,单位为m;当n=1时,默认sn趋于无穷大,此时,c=cd0,即领航车的空气阻力系数取值为cd0;
22、选取机动车比功率(vsp)微观排放模型公式ⅸ,计算车辆能耗及排放数据,其中滚动阻力系数为0.105802kw s/m、旋转滚动阻力系数为0.00135375kw s2/m2、空气阻力系数为0.00033311kw s3/m3;因此,需要对领航车空气阻力系数为cd0=0.00033311,并依此修定跟驰车vsp模型;
23、vsp=0.105802v+0.00135375v2+0.00033311v3+va(ⅸ)
24、上式中,v为本车速度,a为本车加速度。
25、本技术还涉及一种多种交通仿真融合的网联混驾编队一体化测试方法,包含以下步骤:
26、s1、通过构建“领航车-网联人机交互终端+人工驾驶、跟驰车-网联自动驾驶跟驰模型”的混驾编队模式,融合驾驶模拟仿真、数值仿真、微观交通仿真技术,形成网联混驾编队交通人因测试子系统、编队跟驰模型比选标定子系统、交通系统综合影响评价子系统;
27、s2、设计开发网联人机交互终端,构建虚拟网联驾驶环境,并开展网联混驾编队驾驶模拟实验,采集领航车驾驶轨迹数据;
28、s3、以交通人因测试子系统中采集的领航车驾驶轨迹为基准,采用数值仿真方法模拟不同自动驾驶车辆跟驰模型作为跟驰车时的编队行驶状态,比选确定跟驰车最优跟驰模型;
29、s4、标定领航车跟驰模型,对领航车驾驶行为进行特征提取,使跟驰模型具备编队领航车的驾驶行为特征;
30、s5、通过对跟驰模型进行泰勒公式展开,得到跟驰模型稳定性判别式,当判别式结果>0时,判定跟驰模型稳定;
31、s6、将标定好的领航车跟驰模型和跟驰车跟驰模型导入至微观交通仿真软件,进而从编队规模、编队渗透率、不同混合交通流水平、交通安全性、交通顺畅性、交通生态性维度评价网联混驾编队对交通系统层面的影响。
32、上述技术特征可以各种适合的方式组合或由等效的技术特征来替代,只要能够达到本发明的目的。
33、本发明提供的多种交通仿真技术融合的网联混驾编队一体化测试系统及方法,与现有技术相比,至少具备有以下有益效果:提供一种基于多种交通仿真技术融合的网联混驾编队一体化测试系统,支持从领航车个体驾驶行为、车辆编队整体运行特征、交通系统影响三个维度体系化开展网联混驾编队效能和影响机理测试,有助于刻画领航车最优驾驶模式,明确网联混驾编队运行特征及演化规律,量化网联混驾编队对交通系统的综合影响,所得结果可以为政府主管部门、自动驾驶技术研发企业、公路运营管理公司等研究、测试和推广网联自动驾驶编队运行模式提供方案借鉴、技术支持与平台支撑。
- 还没有人留言评论。精彩留言会获得点赞!