一种基于车路协同下视觉感知的车辆交通信号控制方法与流程
本申请涉及智慧交通,特别涉及一种基于车路协同下视觉感知的车辆交通信号控制方法。
背景技术:
1、救护车、消防车等特殊车辆作为城市交通流中的组成部分,如何提高其运行效率、可靠性、安全性的同时,降低特殊车辆对社会常规交通流产生的不利影响,是近年来智能交通领域研究的热点和难点。同时,交通信号控制作为调控交通流、提高安全性、缓解交叉口阻塞的主要措施,往往因其造成的排队车辆而使得特殊车辆的行驶受到阻碍。
2、在现有技术中,对于特殊车辆的优先大多数只是以法规的形式规定特殊车辆在执行特殊任务时不受行驶路线、行驶方向、行驶速度和信号灯的限制,其他车辆或行人应当让行。但在实际实施中,往往会因为出勤时的路况、出勤时的时段的不同,导致其他车辆或行人无法让行,致使出勤车辆行驶受阻,从而导致任务执行延时,甚至导致任务执行失败。其次,从控制层面来说,目前国内实现的一些特殊车辆优先,基于特殊车辆的请求给予一定的绿灯延时,而延时时间是人为提前设定好的,基本上都是一次性的,进而导致实际的情况难以得知,且无法有效协助救护车、消防车等特殊车辆解决在执行任务时的路口受阻情况发生的问题,有待改进。
技术实现思路
1、有鉴于此,本申请的目的在于提供一种基于车路协同下视觉感知的车辆交通信号控制方法,以实现解决特殊车辆在执行任务时路口受阻情况发生的问题并降低特殊车辆对社会常规交通的不利影响的目的。其具体方案如下:
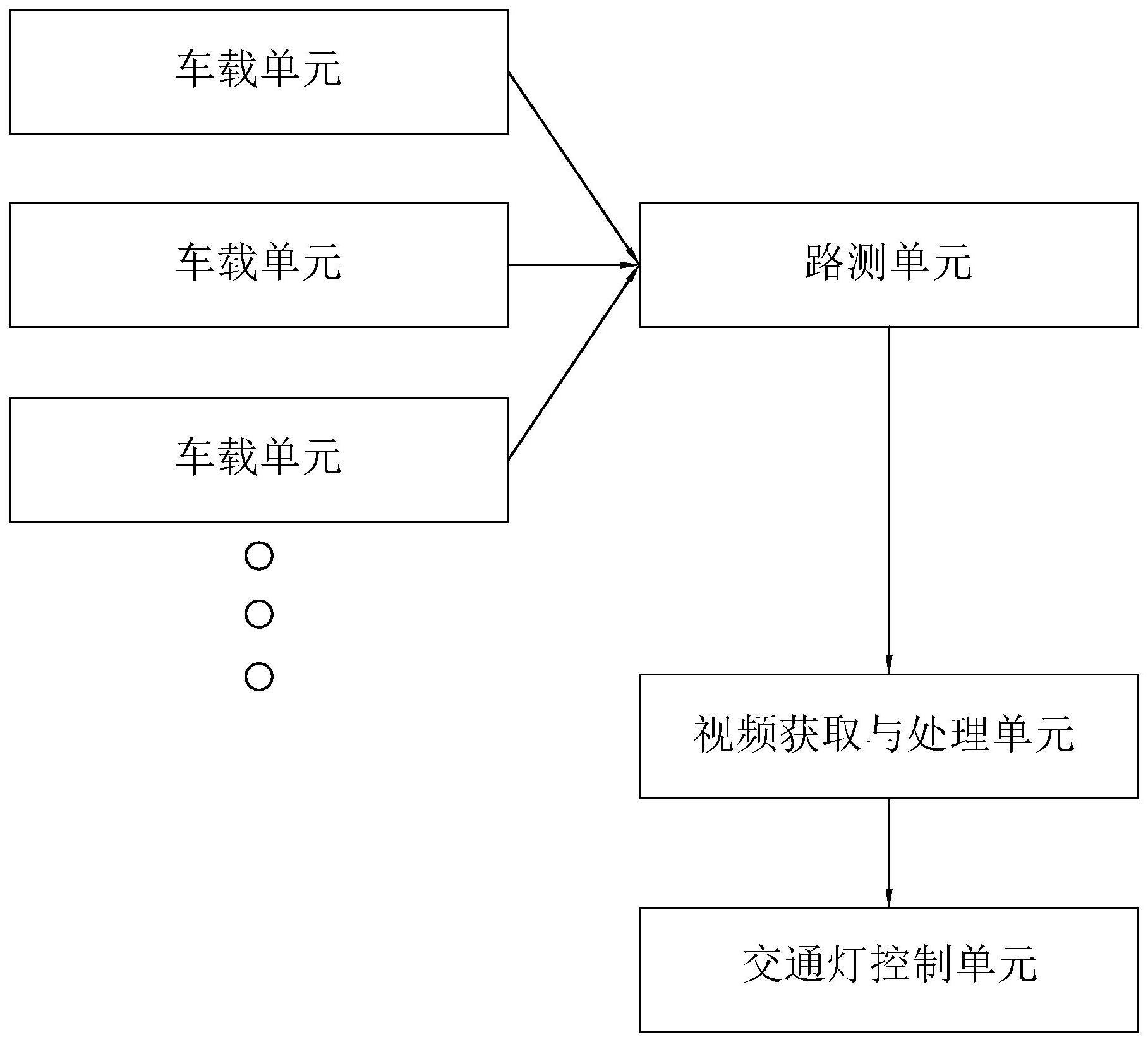
2、一种基于车路协同下视觉感知的车辆交通信号控制方法,采用由多个分别放置相应路口的各个方向的路测单元、安装在车辆上的车载单元、位于路口的视频获取与处理单元和交通灯控制单元组成的车辆交通信号控制系统实施,所述路测单元用于获取车辆信息;所述车载单元用于向配对的所述路测单元发送车辆信息;所述视频获取与处理单元用于视频图像的动态抓取与分析,并对视频图像中的特征信息进行提取和分析,并将图像和特征信息转化为控制信息传输至交通灯控制单元;所述交通灯控制单元用于控制信号灯;具体包括如下步骤:
3、步骤1、车载单元与路测单元的处理步骤:安装有车载单元的车辆进入路口相应方向的路测单元的通讯范围内并建立相互连接,路测单元获取车载单元传输的车辆信息,路测单元再将车辆信息传输至交通控制单元;
4、步骤2、路测单元与交通控制单元的处理步骤:交通控制单元将从路测单元获取的车辆信息进行车辆id配对,确认车辆信息是否已接收存档,若是则继续车辆信息的获取,否则保存车辆信息,并根据车辆信息和行驶方向控制信号灯以便于车辆行驶通过路口;
5、步骤3、交通控制单元与图像处理单元的处理步骤:图像处理单元将从交通控制单元获取的车辆信息保存并依据车辆的方位信息获取车辆行驶视频数据并跟踪。
6、优选地:所述路测单元包括电源模块、路测dsrc通讯模块、路测数据处理模块和远程无线通讯模块;所述车载单元包括车载dsrc通讯模块、输入模块和车载数据处理模块;所述路测单元与所述车载单元由相应的dsrc通讯模块无线连接,所述路测单元与所述交通灯控制单元由远程无线通讯模块连接,所述视频获取与处理单元与所述交通灯控制单元由网线连接。
7、优选地:在步骤1中,所述载单元与路测单元的处理步骤具体包括步骤a、安装有车载单元的车辆进入路口相应方向的路测单元的dsrc模块通讯范围内并建立通讯连接,路测单元获取经由车载单元传输的输入模块传输的车辆信息;步骤b、路测单元通过远程无线通讯模块将车辆信息传输至交通控制单元。
8、优选地:所述输入模块设置有处于启动的出勤状态和处理关系的非出勤状态,所述车辆信息包括车辆id、车辆属性信息、车辆方位信息和信息接收时间戳。
9、优选地:在步骤2中,所述路测单元与交通控制单元的处理步骤具体包括步骤c、交通控制单元将从路测单元获取的车辆信息并进行车辆id配对;步骤d、交通控制单元查询车辆id信息,并当确认车辆id信息已接收存档时则交通控制单元则继续步骤c,否则继续步骤f;步骤f、交通控制单元获取车辆信息表,查询车辆信息表内时间戳最小的车辆信息,并当上述车辆信息中存在记录则继续步骤g,否则继续步骤c;步骤g、依据车辆信息控制车辆所在路口的相应方向的信号灯为绿灯,且交叉方向的信号灯为红灯;步骤h、交通控制单元获取自图像处理单元中的车辆离开路口的信息,并清空车辆在车辆信息表内的记录,并继续步骤f,若单位时间内未获取自图像处理单元中的车辆离开路口的信息,则继续步骤h,若设定时间内未获取自图像处理单元中的车辆离开路口的信息,则继续步骤i,且单位时间短于设定时间;步骤i、异常处理。
10、优选地:在步骤g中,当车辆所在路口的相应方向的信号灯为黄闪灯时,则黄闪灯立即切换为绿灯,且交叉方向的信号灯为红灯;当车辆所在路口的相应方向的信号灯为红灯时,则红灯立即切换为黄闪灯,并在黄闪灯结束后切换为绿灯,并控制交叉方向的信号灯为红灯。
11、优选地:在步骤d与步骤f之间还包括步骤e,所述步骤e为交通控制单元保存车辆信息,并向图像处理单元发送车辆信息,记录车辆数目值加1,同时通知图像处理单元相应方向的车辆路过信号。
12、优选地:在步骤3中,所述交通控制单元与图像处理单元的处理步骤具体包括步骤j、图像处理单元获取交通控制单元的车辆信息和车辆在相应方向的行驶信息;步骤k、图像处理单元通过控制摄像头获取车辆行驶视频数据并跟踪,且当车辆从相应的路测单元的相应方向驶出时,图像处理方向将相应方向的车辆驶离数目值加1;步骤l、比较相应方向的驶离数目值与对应方向的车辆数目值,若相等则车辆已全部驶离,交通控制单元发送对应方向的车辆驶离路口的信息,且将对应方向的车辆数目值清零。
13、通过以上方案可知,本申请提供了一种基于车路协同下视觉感知的车辆交通信号控制方法,该基于车路协同下视觉感知的车辆交通信号控制方法具有以下有益效果:
14、1、通过路测单元、车载单元、视频获取与处理单元和交通灯控制单元组成的车辆交通信号控制系统实施,进而对特殊车辆形成高效、稳定的视觉感知和信号灯的控制,实现解决特殊车辆在执行任务时路口受阻情况发生的问题并降低特殊车辆对社会常规交通的不利影响的目的;
15、2、通过针对于特殊车辆在相应路口的驶入判断和驶出判断,提升信号灯的变化逻辑稳定性,有效降低特殊车辆对社会常规交通的不利影响;
16、3、通过针对于特殊车辆的车辆信息的筛查和判断,降低多辆特殊车辆路过相应路口的信号灯控制难度,并实现信号灯控制稳定和有效提升特殊车辆路过相应路口以及避免对社会常规交通的不利影响的效果。
技术特征:
1.一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:采用由多个分别放置相应路口的各个方向的路测单元、安装在车辆上的车载单元、位于路口的视频获取与处理单元和交通灯控制单元组成的车辆交通信号控制系统实施,所述路测单元用于获取车辆信息;所述车载单元用于向配对的所述路测单元发送车辆信息;所述视频获取与处理单元用于视频图像的动态抓取与分析,并对视频图像中的特征信息进行提取和分析,并将图像和特征信息转化为控制信息传输至交通灯控制单元;所述交通灯控制单元用于控制信号灯;具体包括如下步骤:
2.根据权利要求1所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:所述路测单元包括电源模块、路测dsrc通讯模块、路测数据处理模块和远程无线通讯模块;所述车载单元包括车载dsrc通讯模块、输入模块和车载数据处理模块;所述路测单元与所述车载单元由相应的dsrc通讯模块无线连接,所述路测单元与所述交通灯控制单元由远程无线通讯模块连接,所述视频获取与处理单元与所述交通灯控制单元由网线连接。
3.根据权利要求2所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:在步骤1中,所述载单元与路测单元的处理步骤具体包括步骤a、安装有车载单元的车辆进入路口相应方向的路测单元的dsrc模块通讯范围内并建立通讯连接,路测单元获取经由车载单元传输的输入模块传输的车辆信息;步骤b、路测单元通过远程无线通讯模块将车辆信息传输至交通控制单元。
4.根据权利要求3所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:所述输入模块设置有处于启动的出勤状态和处理关系的非出勤状态,所述车辆信息包括车辆id、车辆属性信息、车辆方位信息和信息接收时间戳。
5.根据权利要求2所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:在步骤2中,所述路测单元与交通控制单元的处理步骤具体包括步骤c、交通控制单元将从路测单元获取的车辆信息并进行车辆id配对;步骤d、交通控制单元查询车辆id信息,并当确认车辆id信息已接收存档时则交通控制单元则继续步骤c,否则继续步骤f;步骤f、交通控制单元获取车辆信息表,查询车辆信息表内时间戳最小的车辆信息,并当上述车辆信息中存在记录则继续步骤g,否则继续步骤c;步骤g、依据车辆信息控制车辆所在路口的相应方向的信号灯为绿灯,且交叉方向的信号灯为红灯;步骤h、交通控制单元获取自图像处理单元中的车辆离开路口的信息,并清空车辆在车辆信息表内的记录,并继续步骤f,若单位时间内未获取自图像处理单元中的车辆离开路口的信息,则继续步骤h,若设定时间内未获取自图像处理单元中的车辆离开路口的信息,则继续步骤i,且单位时间短于设定时间;步骤i、异常处理。
6.根据权利要求5所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:在步骤g中,当车辆所在路口的相应方向的信号灯为黄闪灯时,则黄闪灯立即切换为绿灯,且交叉方向的信号灯为红灯;当车辆所在路口的相应方向的信号灯为红灯时,则红灯立即切换为黄闪灯,并在黄闪灯结束后切换为绿灯,并控制交叉方向的信号灯为红灯。
7.根据权利要求5所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:在步骤d与步骤f之间还包括步骤e,所述步骤e为交通控制单元保存车辆信息,并向图像处理单元发送车辆信息,记录车辆数目值加1,同时通知图像处理单元相应方向的车辆路过信号。
8.根据权利要求7所述的一种基于车路协同下视觉感知的车辆交通信号控制方法,其特征在于:在步骤3中,所述交通控制单元与图像处理单元的处理步骤具体包括步骤j、图像处理单元获取交通控制单元的车辆信息和车辆在相应方向的行驶信息;步骤k、图像处理单元通过控制摄像头获取车辆行驶视频数据并跟踪,且当车辆从相应的路测单元的相应方向驶出时,图像处理方向将相应方向的车辆驶离数目值加1;步骤l、比较相应方向的驶离数目值与对应方向的车辆数目值,若相等则车辆已全部驶离,交通控制单元发送对应方向的车辆驶离路口的信息,且将对应方向的车辆数目值清零。
技术总结
本申请公开了一种基于车路协同下视觉感知的车辆交通信号控制方法,涉及智慧交通技术领域,包括如下步骤:步骤1、车载单元与路测单元的处理步骤:安装有车载单元的车辆进入路口相应方向的路测单元的通讯范围内并建立相互连接,路测单元获取车载单元传输的车辆信息,路测单元再将车辆信息传输至交通控制单元;步骤2、路测单元与交通控制单元的处理步骤:交通控制单元将从路测单元获取的车辆信息进行车辆ID配对,确认车辆信息是否已接收存档,若是则继续车辆信息的获取,否则保存车辆信息,并根据车辆信息和行驶方向控制信号灯以便于车辆行驶通过路口;步骤3、交通控制单元与图像处理单元的处理步骤。本申请具有解决路口受阻问题的效果。
技术研发人员:朱红君,汤时达
受保护的技术使用者:宁波迅畅智能交通科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!