一种基于人工智能的计算机设备故障预警系统及方法与流程
本发明涉及计算机设备故障预警,具体为一种基于人工智能的计算机设备故障预警系统及方法。
背景技术:
1、随着停车问题的日益增多,很多住宅小区都基本安装了智能化的停车场系统,智能停车场系统一般由入口控制机、出口控制机、智能闸道、地感线圈、余位显示屏、图像识别设备、系统软件和管理工作站等组成;且智能停车场系统中地感线圈作为初始检测的环节起到至关重要的作用,当地感线圈在使用过程中出现破损或损坏,会直接导致道闸不能正常开闸、落闸的现象,并出现过车不能自动落闸等故障,从而造成停车场系统不能够正常运行;地感线圈的控制是基于计算机处理的停车场控制系统,如何有效的通过计算机处理分析实时监测状态下的地感线圈的维保状态是当前需要解决的重要问题。
技术实现思路
1、本发明的目的在于提供一种基于人工智能的计算机设备故障预警系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于人工智能的计算机设备故障预警方法,方法包括以下分析步骤:
3、步骤s1:获取以计算机为基础构建的停车场闸机控制系统,停车场闸机控制系统包括前端子系统、网络传输子系统和后端平台管理子系统;前端子系统是指对进出停车场的车辆进行数据的捕捉和显示的系统;网络传输子系统是指对前端子系统获取的数据实现传输与交换的系统;后端平台管理子系统是指对网络传输子系统传输的数据进行分析的系统;
4、步骤s2:获取应用停车场闸机控制系统的m个周期数据,周期数据是指后端平台管理子系统中首次安装地感线圈到首次维修或更换地感线圈时的日期内记录的数据,m表示应用停车场闸机控制系统的总场所个数;并记首次安装地感线圈的日期与首次维修或更换地感线圈的日期的时间间隔为实际安全周期;分析停车场闸机控制系统基于地感线圈的故障影响指数;
5、步骤s3:基于故障影响指数,判断故障影响指数与实际安全周期的相关系数;
6、步骤s4:获取监测停车场闸机控制系统中记录的实时周期数据,实时周期数据是指后端平台管理子系统中首次安装地感线圈到当前实时日期内记录的数据;计算地感线圈的实时状态指数,并基于故障影响指数与实际安全周期的相关性,分析实时监控下停车场闸机控制系统中地感线圈的预警特征值;
7、步骤s5:基于预警特征值,传输预警信号于后端平台管理子系统,并通过网络传输子系统于前端子系统进行预警显示。
8、进一步的,步骤s2中分析停车场闸机控制系统基于地感线圈的故障影响指数,包括以下分析步骤:
9、周期数据包括有效响应地感线圈的车辆行径次数、车辆重量和车辆停留时长,有效响应地感线圈是指在地感线圈感应区域内经过车辆的前轮与后轮均完成一次感应覆盖的行为;车辆行径次数是指车辆有效响应地感线圈的次数;车辆停留时长是指车辆进入地感线圈感应区域后保持静止的总时长;车辆数目、车辆重量和车辆停留时长都反应出车辆对于地感线圈的机械损害,因为当地感线圈一旦破损时,作为停车场闸机控制系统的第一关卡就失去作用,整体闸机控制失效;
10、获取第i个监测场所在实际安全周期内的第j日车辆行径总次数pij,计算第i个监测场所第j日车辆的行径指数gij,gij=[pij-min(pij)]/[max(pij)-min(pij)];其中min(pij)表示第i个监测场所在实际安全周期内单日车辆行径总次数的最小值,max(pij)表示第i个监测场所在实际安全周期内单日车辆行径总次数的最大值;监测场所是指应用停车场闸机控制系统的场所;
11、获取第i个监测场所在实际安全周期内的平均车辆重量di0,提取车辆重量超过平均车辆重量di0的第一目标行径总数mi;利用公式:fi=[mi/(∑pij)]*di0;计算第i个监测场所车辆的第一机械指数fi;其中di0是指第i个监测场所中超过平均车辆重量di0对应车辆的平均重量值;将不同监测场所对应的车辆重量进行分析是避免场所的特殊性如采砂场等重机械车辆的通行在只分析车辆行径次数比例问题下的不合理性;
12、获取第i个监测场所在实际安全周期内存在停留时长的第二目标行径总数ni,利用公式:hi=[ni/(∑pij)]*ti0;计算第i个监测场所车辆的第二机械指数hi,其中ti0表示第i个监测场所中存在停留时长对应车辆的平均停留时长。
13、进一步的,步骤s2中分析停车场闸机控制系统基于地感线圈的故障影响指数,还包括以下步骤:
14、提取实际安全周期内的目标天气数据,目标天气数据包括高温数据和低温数据,高温数据是指应用停车场闸机控制系统场所所处的环境温度大于等于三十五摄氏度时的温度数据,低温数据是指应用停车场闸机控制系统场所所处的环境温度小于等于零摄氏度时的温度数据;分析环境温度数据是因为地感线圈不仅会受到机械损伤还会受到高低温加速老化的问题;
15、获取k个监测场所在实际安全周期内存在目标天气数据的平均天数q0,i≤k,q0=(1/k)*[∑qi];qi表示第i个监测场所在实际安全周期内记录目标天气数据的天数;获取第i个监测场所对应的实际安全周期ti;利用公式:
16、j0=q0/{(1/k)*[∑ti]}
17、计算应用停车场闸机控制系统的监测场所内地感线圈的环境影响指数j0;
18、利用公式:
19、yi=a1*{(1/ti)*[∑gij]}+a2*fi+a3*hi+j0
20、计算第i个应用停车场闸机控制系统的监测场所基于地感线圈的故障影响指数yi;j≤ti,a1、a2和a3对应表示影响系数,且a1+a2+a3=1,0<a1、a2、a3<1。
21、进一步的,步骤s3包括以下分析步骤:
22、获取第i个监测场所的实际安全周期ti以及对应的故障影响指数yi,构建故障特征数据对(ti,yi);基于k个监测场所对应的故障特征数据对,利用公式:
23、vti,yi=[∑(ti-t0)(yi-y0)]/[∑(ti-t0)2∑(yi-y0)2]1/2
24、计算故障特征数据对的相关系数vti,yi,设置相关系数阈值v0,
25、若|vti,yi|≥v0且vti,yi>0,则实际安全周期与故障影响指数存在正相关;
26、若|vti,yi|≥v0且vti,yi<0,则实际安全周期与故障影响指数存在负相关;其他情况则为不相关。
27、进一步的,步骤s4包括以下分析步骤:
28、获取实时周期数据对应目标周期内的单日实时车辆行径总次数、min(pij)和max(pij),目标周期r是指后端平台管理子系统中首次安装地感线圈到当前实时日期的周期时长;计算单日目标行径指数和平均行径指数,目标行径指数与行径指数gij计算方式相同;平均行径指数为单日目标行径指数总和除以目标周期;
29、获取实时周期数据对应目标周期内的实时平均车辆重量、第一目标行径总数和超过实时平均车辆重量对应车辆的实时平均重量值,计算第一实时机械指数,第一目标机械指数与第一机械指数fi计算方式相同;
30、获取实时周期数据对应目标周期内的实时第二目标行径总数、单日实时车辆行径总次数和存在停留时长对应车辆的实时平均停留时长,计算第二实时机械指数,第二实时机械指数与第二机械指数hi计算方式相同;
31、基于平均行径指数、第一实时机械指数、第二实时机械指数和环境影响指数,计算实时状态指数y0,实时状态指数与故障影响指数计算方式相同;
32、获取k个监测场所中实际安全周期对应的最小值为待分析周期min(ti),以及待分析周期对应的故障影响指数为待分析影响指数yi‘;当实际安全周期与故障影响指数存在正相关时,利用公式:y0/yi‘=r/min(ti);当实际安全周期与故障影响指数存在负相关时,利用公式:y0/yi‘=min(ti)/r,计算实时监控下停车场闸机控制系统的临界周期r;
33、若临界周期r≤r时,则传输预警特征值为0,并立即预警响应;r≤r时说明当前地感线圈的可使用状态时长已经超出预估分析的临界时长,那么就会存在极高的安全风险,所以需要立即预警进行检修;
34、当临界周期r>r时,计算预警特征值c=r-r。r>r时说明地感线圈的预估可使用时长要大于当前已经使用的时长,说明当前状态还未到达临界风险状态,只需将差值进行显示用以告知运维人员即可达到可视化监管的目的。
35、进一步的,步骤s4还包括:
36、当实际安全周期与故障影响指数不相关时,获取与实时状态指数y0绝对值差值最小的故障影响指数为目标影响指数;提取目标影响指数对应的实际安全周期为目标安全周期;
37、当目标安全周期小于等于目标周期时,传输预警特征值为0,并立即预警响应;
38、当目标安全周期大于目标周期时,计算预警特征值为目标安全周期与目标周期的差值。
39、当数据对不存在相关性时,通过数值比较相似可以最快的获取对实时状态下评判地感线圈预警状态的最优标准,而当数据对存在相关性时,通过比例关系可以精确分析出预警周期。
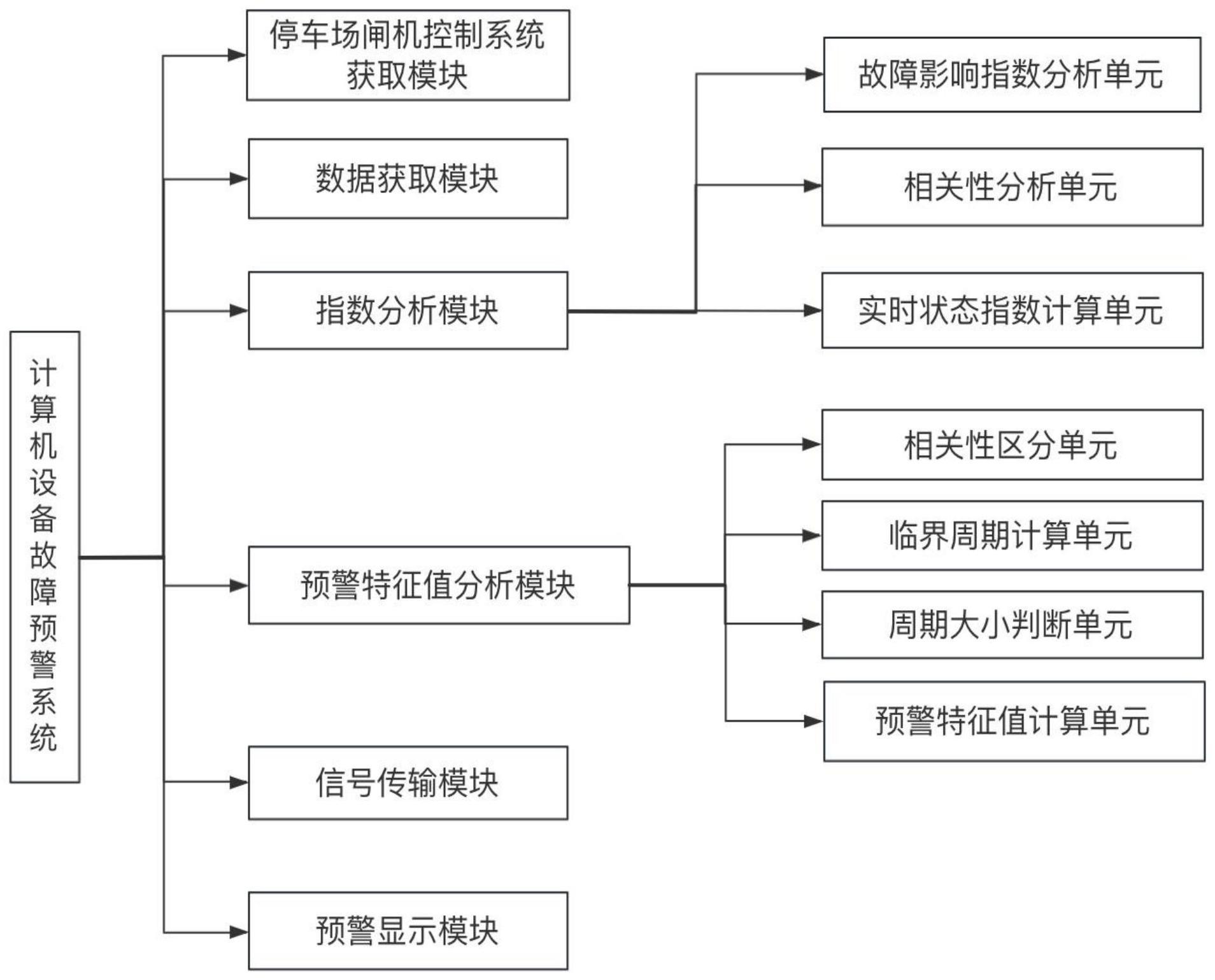
40、一种基于人工智能的计算机设备的故障预警系统,系统包括停车场闸机控制系统获取模块、数据获取模块、指数分析模块、预警特征值分析模块、信号传输模块和预警显示模块;
41、停车场闸机控制系统获取模块用于获取以计算机为基础构建的停车场闸机控制系统,停车场闸机控制系统包括前端子系统、网络传输子系统和后端平台管理子系统;
42、数据获取模块用于获取应用停车场闸机控制系统的周期数据和监测场所的实时数据;
43、指数分析模块用于分析停车场闸机控制系统基于地感线圈的故障影响指数、实时监测地感线圈的实时状态指数;
44、预警特征值分析模块用于分析实时监控下停车场闸机控制系统中地感线圈的预警特征值;
45、信号传输模块用于基于预警特征值,传输预警信号于后端平台管理子系统;
46、预警显示模块用于通过网络传输子系统于前端子系统进行预警显示。
47、进一步的,指数分析模块包括故障影响指数分析单元、相关性分析单元和实时状态指数计算单元;
48、故障影响指数分析单元用于基于机械数据和环境数据分析计算故障影响指数;
49、相关性分析单元用于分析实际安全周期以及对应的故障影响指数的相关性;
50、实时状态指数计算单元用于获取实时数据以故障影响指数的计算方式计算实时状态指数。
51、进一步的,预警特征值分析模块包括相关性区分单元、临界周期计算单元、周期大小判断单元和预警特征值计算单元;
52、相关性区分单元用于对相关性分析单元中输出的相关性分析结果进行区分;
53、临界周期计算单元用于基于相关性区分单元的输出结果、实际安全周期对应的最小值以及对应的故障影响指数计算临界周期;
54、周期大小判断单元用于判断临界周期与目标周期的大小关系;
55、预警特征值计算单元用于基于周期大小判断单元的输出结果计算特征值。
56、与现有技术相比,本发明所达到的有益效果是:本发明通过对应用停车场闸机控制系统的监测场所进行完整周期内的数据提取,从两大方向对数据进行分析处理,以获取地感线圈由于机械损伤和环境损伤对应的评估指数;从而数字化和可视化的分析出地感线圈在使用过程中的动态数据变化;除此之外,本发明通过分析评估指数与实际使用周期的属性关系从而限定对实时监测场所下地感线圈的使用周期的预估方式,进一步提高了对实时停车场闸机控制系统中地感线圈的监测精准性,使得地感线圈的使用程度可视化、数字化,对于地感线圈的维保过程不再被动。
- 还没有人留言评论。精彩留言会获得点赞!