一种基于数字数据处理的车路协同方法与流程
本发明涉及智能交通,特别涉及一种基于数字数据处理的车路协同方法。
背景技术:
1、目前,“车路协同”即为通过将驾驶者、车辆、道路三网融合后获得的数据实现对道路交通的智能控制。在智能交通控制领域,未来的交通管控目标为构建规则化的道路交通管理体系,以及向驾驶者和车辆提供靶向精准信息服务。
2、但是,现存的车路协同方法仅仅从加快数据传输、减少信息延误,来改善车路协同的管理控制缺陷,
3、例如,公开号为cn113178076b,专利名称为一种车路协同系统和车路协同方法的专利,提供一种车路协同系统和车路协同方法,属于通信技术领域,其中,车路协同系统包括:边缘云、路侧计算节点和路侧微基站;路侧计算节点用于获取所述路侧基础设施采集的原始交通数据,并基于该原始交通数据确定交通信息;路侧微基站包括:近距离广播通讯模组和移动网络通讯模组,近距离广播通讯模组用于将获取的所述交通信息发送至第一覆盖范围内的交通参与元素,移动网络通讯模组用于将获取的所述交通信息发送至边缘云,所述第一覆盖范围为路侧微基站的覆盖范围。本发明实施例能够降低车路协同系统的时延和建设成本,并提高车路协同系统处理效率,但是,该专利没有获取车辆端的信息,也没有对从路侧基础设施获取的原始交通信息和在车辆端获取的信息的融合分析出更多可参考信息,使得车路协同管理所依据的信息有限,进而导致车路协同管理效果不佳。
4、例如,公开号为cn111432375a,专利名称为一种基于v2x的车路协同方法及车路协同系统,提供了一种基于v2x的车路协同方法及车路协同系统,所述车路协同方法包括以下步骤:通过所述第二车辆采集所述第一车辆的第一数据信息;通过v2x通信模块采集所述第一车辆的第二数据信息,并将所述第二数据信息和所述第一数据信息融合处理,以形成车辆信息;将所述车辆信息上传至云端,并由所述云端实时共享给所述后方车辆;所述后方车辆根据所述车辆信息协同完成驾驶决策。本发明的基于v2x的车路协同方法,可以将第二车辆采集的第一数据信息和v2x通信模块采集的第二数据信息进行融合处理,消除信息传递盲区,融合处理后的车辆信息可以共享给后方车辆,后方车辆可以根据融合后的车辆信息协同完成驾驶决策,避免后方车辆发生连环事故,该专利没有获取道路相关信息,也没有对道路相关信息与车辆端获得第一数据信息和第二数据信息进行融合分析,使得车路协同管理所依据的信息有限,进而导致车路协同管理效果不佳。
5、因此,本发明提出了一种基于数字数据处理的车路协同方法。
技术实现思路
1、本发明提供一种基于数字数据处理的车路协同方法,用以基于实时获取的全方位实时路景视频实现对道路云端数据的实时完善,也通过对当前可获取的所有车辆的全方位实时路景视频数据和当前所在位置数据的融合分析,实现了对道路中目标车辆与其他车辆之间的相对位置关系的准确确定,丰富了车路协同管理所依据的信息,进而提高了对目标车辆的车路协同管理效果。
2、本发明提供一种基于数字数据处理的车路协同方法,包括:
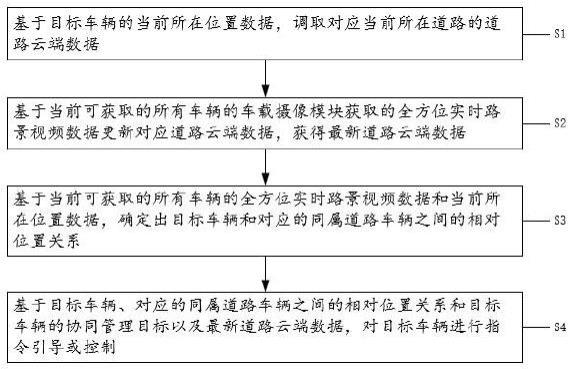
3、s1:基于目标车辆的当前所在位置数据,调取对应当前所在道路的道路云端数据;
4、s2:基于当前可获取的所有车辆的车载摄像模块获取的全方位实时路景视频数据更新对应道路云端数据,获得最新道路云端数据;
5、s3:基于当前可获取的所有车辆的全方位实时路景视频数据和当前所在位置数据,确定出目标车辆和对应的同属道路车辆之间的相对位置关系;
6、s4:基于目标车辆、对应的同属道路车辆之间的相对位置关系和目标车辆的协同管理目标以及最新道路云端数据,对目标车辆进行指令引导或控制;
7、其中,所有车辆包含目标车辆和非目标车辆;
8、步骤s3:基于当前可获取的所有车辆的全方位实时路景视频数据和当前所在位置数据,确定出目标车辆和对应的同属道路车辆之间的相对位置关系,包括:
9、计算出每个当前可获取的非目标车辆的当前所在位置数据和目标车辆的当前所在位置数据的差值;
10、在所有当前可获取的非目标车辆中筛选出差值在当前所在道路的差值阈值之内的非目标车辆当作目标车辆的同属道路车辆;
11、基于所有同属道路车辆的全方位实时路景视频数据和目标车辆的全方位实时路景视频数据,分析出同属道路车辆与目标车辆之间的相对位置关系。
12、优选的,所述的一种基于数字数据处理的车路协同方法,s1:基于目标车辆的当前所在位置数据,调取对应当前所在道路的道路云端数据,包括:
13、s101:基于车载道路定位模块获取目标车辆的当前所在位置数据;
14、s102:基于当前所在位置数据确定出当前所在道路,并在道路云端数据库中调取当前所在道路的道路云端数据。
15、优选的,所述的一种基于数字数据处理的车路协同方法,s2:基于当前可获取的所有车辆的车载摄像模块获取的全方位实时路景视频数据更新对应道路云端数据,获得最新道路云端数据,包括:
16、s201:在道路云端数据中确定出全方位实时路景视频数据对应的同形式道路云端数据和异形式道路云端数据;
17、s202:在全方位实时路景视频数据中确定出与同形式道路云端数据覆盖的信息类目一致的第一全方位实时路景视频数据,并基于第一全方位实时路景视频数据更新同形式道路云端数据,获得最新同形式道路云端数据;
18、s203:确定出全方位实时路景视频数据中除第一全方位实时路景视频数据以外剩余的第二全方位实时路景视频数据;
19、s204:将第二全方位实时路景视频数据与异形式道路云端数据分别进行双向形式转换,基于双向形式转换后的结果更新异形式道路云端数据,获得最新异形式道路云端数据;
20、s205:将最新同形式道路云端数据和最新异形式道路云端数据汇总,获得最新道路云端数据。
21、优选的,所述的一种基于数字数据处理的车路协同方法,基于第一全方位实时路景视频数据更新同形式道路云端数据,获得最新同形式道路云端数据,包括:
22、确定出第一全方位实时路景视频数据和同形式道路云端数据中数据不同的差别信息类目;
23、将同形式道路云端数据差别信息类目包含的数据替换为第一全方位实时路景视频数据中对应差别信息类目包含的数据,获得最新同形式道路云端数据。
24、优选的,所述的一种基于数字数据处理的车路协同方法,s204:将第二全方位实时路景视频数据与异形式道路云端数据分别进行双向形式转换,基于双向形式转换后的结果更新异形式道路云端数据,获得最新异形式道路云端数据,包括:
25、将第二全方位实时路景视频数据的数据形式转换为异形式道路云端数据的数据形式,获得第一转换数据;
26、将异形式道路云端数据的数据形式转换为第二全方位实时路景视频数据的数据形式,获得第二转换数据;
27、将第一转换数据与异形式道路云端数据进行作差比对,获得第一差别数据;
28、将第二转换数据与第二全方位实时路景视频数据进行作差比对,获得第二差别数据;
29、将第一差别数据的数据形式转换为预设数据形式,获得第一标准形式差别数据,同时,将第二差别数据的数据形式转换为预设数据形式,获得第二标准形式差别数据;
30、将第一标准形式差别数据和第二标准形式差别数据的共有数据的数据形式转换为异形式道路云端数据的数据形式,获得待更新数据;
31、将待更新数据和异形式道路云端数据进行去重合并,获得最新异形式道路云端数据。
32、优选的,所述的一种基于数字数据处理的车路协同方法,基于所有同属道路车辆的全方位实时路景视频数据和目标车辆的全方位实时路景视频数据,分析出同属道路车辆与目标车辆之间的相对位置关系,包括:
33、基于同区色差阈值对全方位实时路景视频数据中的每个视频帧进行色区划分,获得多个划分色区;
34、基于异帧色差阈值,对不同全方位实时路景视频数据中包含的视频帧中的划分色区进行匹配,获得异帧色区匹配结果;
35、在异帧色区匹配结果中确定出成功匹配视频帧组合;
36、将成功匹配视频帧组合中两个视频帧输入至预先训练好的相对拍摄位姿分析模型中,获得成功匹配视频帧组合中两个视频帧的相对拍摄位姿关系;
37、基于成功匹配视频帧组合中两个视频帧的获取来源和相对拍摄位姿关系,确定出两个视频帧对应的车辆之间的相对位置关系;
38、基于确定出的所有相对位置关系确定出同属道路车辆与目标车辆之间的相对位置关系;
39、其中,相对拍摄位姿分析模型用于识别出两个视频帧的相对拍摄位姿关系,相对拍摄位姿关系即为两个车载摄像模块在获取两个视频帧时对应的拍摄位置和拍摄角度的位姿数据,用三维坐标系表示。
40、优选的,所述的一种基于数字数据处理的车路协同方法,基于异帧色差阈值,对不同全方位实时路景视频数据中包含的视频帧中的划分色区进行匹配,获得异帧色区匹配结果,包括:
41、将属于不同全方位实时路景视频数据的两个视频帧当作非同属视频帧组合,将属于非同属视频帧组合中不同的非同属视频帧的划分色区当作异帧划分色区组合;
42、计算出异帧划分色区组合中两个异帧划分色区的平均色度之间的色度差,并将色度差不超过异帧色差阈值的两个异帧划分色区当作匹配成功划分色区组合;
43、基于非同属视频帧组合中包含的所有匹配成功划分色区组合,计算出非同属视频帧组合的匹配成功率,将匹配成功率超过成功率阈值的所有非同属视频帧组合中包含所有匹配成功划分色区组合当作异帧色区匹配结果。
44、优选的,所述的一种基于数字数据处理的车路协同方法,在异帧色区匹配结果中确定出成功匹配视频帧组合,包括:
45、按照预设方式在每个划分色区的轮廓上确定出预设个数的标志点,基于标志点在对应视频帧中的坐标值和第一预设确定顺序,生成每个划分色区的轮廓标志点坐标序列;
46、基于每个划分色区的中心坐标与对应的相邻划分色区的轮廓标志点坐标序列中每个标志点的坐标值之间的坐标差值,生成对应划分色区和对应相邻划分色区的标志点间距序列;
47、基于划分色区和对应的所有相邻划分色区的标志点间距序列以及第二预设确定顺序,生成对应划分色区的相邻色区形状表征矩阵;
48、基于异帧色区匹配结果中的匹配成功划分色区组合中的两个划分色区的相邻色区形状表征矩阵,计算出匹配成功划分色区组合中两个划分色区的邻域匹配度;
49、基于非同属视频帧组合中所有匹配成功划分色区组合的邻域匹配度,计算出非同属视频帧组合的综合匹配度;
50、将综合匹配度不小于匹配度阈值的非同属视频帧组合当作成功匹配视频帧组合。
51、优选的,所述的一种基于数字数据处理的车路协同方法,s4:基于目标车辆、对应的同属道路车辆之间的相对位置关系和目标车辆的协同管理目标以及最新道路云端数据,对目标车辆进行指令引导或控制,包括:
52、当协同管理目标为换道提醒时,则基于相对位置关系确定出目标车辆的当前所在车道;
53、基于目标车辆的当前所在道路和当前所在车道以及当前所选规划路线,判断出目标车辆是否需要换道,若是,则确定出目标车辆的目标车道,基于当前可获取的所有同属道路车辆的当前所在车道、最新道路云端数据和当前所选规划路线以及目标车辆的目标车道,估算出最佳换道提示时间;
54、基于最佳换道提示时间对目标车辆内的驾驶员进行语音换道提示;
55、否则,将对应的判断结果保留。
56、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
57、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!