一种基于路面状态识别的车辆防碰撞方法与流程
本发明涉及车辆行驶安全,具体涉及一种基于路面状态识别的车辆防碰撞方法。
背景技术:
1、随着汽车的大量普及,研究如何主动防止汽车发生碰撞对减少交通事故造成的损失具有重要意义。国内对路面特征及状态识别的研究还处于起步阶段,对于防撞预警系统规避控制的研究较少。路面识别子系统是汽车主动防撞预警系统中一个重要组成部分,国内目前路面识别的方法中可行性较高的一种是基于利用车轮角减速度、制动缸压力以及滑移率的变化来进行路面识别,此种方法具有良好的实时性,但是该方法所使用的是神经网络控制器,需要反复学习记忆标准信号,建立识别样本库,需要大量采样训练样本,因此该方法识别标准路面虽然具有准确率高、快速、实时性好的特点,但是对于未被处理过的非标准路面的识别则是其软肋。
2、由于同类型的路面,即使是同一路面但处于不同路面湿滑状态时,其最佳附着系数也是不尽相同的,而最佳附着系数的获得是必须要对汽车滑移率进行控制的,而汽车最佳制动效果的保证,需使汽车滑移率保持在最佳滑移率附近,但是目前汽车缺乏实时路面特征识别,并不能确定路面最佳附着系数,因而不能准确确定最佳滑移率,只能以滑移率作为控制目标,或通过比较的方法在刹车过程中寻找最佳滑移率,由此可见路面特征和湿滑状态的识别是非常关键的。
3、公开号为cn101609606a,公开日为2009年12月23日,发明名称为“一种路面湿滑状态识别方法”的发明专利,其具体的技术方案为:本发明涉及一种路面湿滑状态识别方法,它包括以下步骤:1)建立一包括输入层、隐含层和输出层的路面湿滑状态识别bp人工神经网络;2)测量不同月份、不同地区和不同时刻的空气湿度、路面温度、路面温度与气温温差以及路面湿滑状态,并定义输入向量和输出向量;3)利用步骤2)中的测量值离线训练人工神经网络,以获得iwi、bj、iwj和b;4)将步骤3)中训练获得的iwi、iwj和bj、b嵌入车载ecu内,根据实际输入的月份、地区、时刻、湿度、路面温度及路面温度与气温温差,计算输出向量;5)根据步骤4)计算得出的输出向量,并依据步骤2)中定义的输出向量,判断出路面湿滑状态,并通过显示装置向驾驶员提供相应路面湿滑信息。本发明能够准确识别出路面湿滑状态,便于车载ecu计算出路面最大附着系数,为行车安全提供了有力保障。
4、上述现有技术主要是实现了路面湿滑状态的检测及推断路面最大附着系数和最大刹车距离等,其考虑的因素较少,并没有将天气情况、车速对人反应时间的影响以及路面状态和速度对刹车最大减速度的影响考虑到车辆防碰撞中,不能够很好的提高车辆的防碰撞精度和可靠性。
技术实现思路
1、为了解决上述现有技术存在的问题和缺陷,本发明提出了一种基于路面状态识别的车辆防碰撞方法,利用识别的路面类型和湿滑状态,通过模糊算法和安全距离模型,相对于不同的路面类型和湿滑状态计算出车辆间的安全距离,并及时向行驶中的车辆发出预警,实现主动防撞,保障了行车安全。
2、为了实现上述发明目的,本发明的技术方案如下:
3、一种基于路面状态识别的车辆防碰撞方法,包括以下步骤:
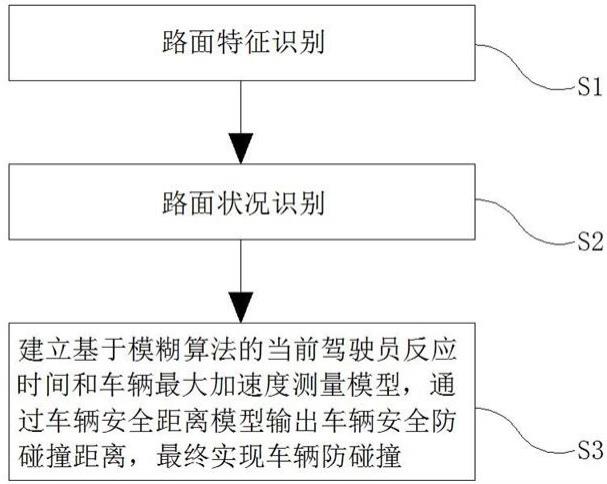
4、步骤s1.路面特征识别;
5、步骤s11.加速度传感器采集车轮振动信号,分别以相同的时速在水泥路面以及沥青路面进行数据采集,然后对两种路面产生的车轮振动信号进行频谱分析,通过大量数据统计分析得到车轮高频振动频谱特征向量;
6、步骤s12.构造神经网络分类器对路面类型进行识别,判断当前路面类型;
7、步骤s2.路面状况识别;
8、步骤s21.通过湿度传感器分别采集空气温度和空气湿度信息,在通过红外温度传感器采集路面温度;
9、步骤s22.获取地理位置信息、季节以及当前时刻信息;
10、步骤s23.构建包括输入层、隐含层和输出层的路面湿滑状态识别bp神经网络,其中,输入层接收当前时刻、季节、地理位置、路面温度、空气温度和空气湿度的6维输入向量;
11、步骤s24.基于构建的路面状况识别bp神经网络,判断当前路面状况;
12、步骤s3.建立基于模糊算法的当前驾驶员反应时间和车辆最大加速度测量模型,通过车辆安全距离模型输出车辆安全防碰撞距离,最终实现车辆防碰撞;
13、步骤s31. 选择输入变量和输出变量,基于模糊算法输出当前驾驶员的反应时间以及车辆最大加速度;
14、步骤s32.建立车辆安全距离模型;
15、步骤s33.结合当前驾驶员的反应时间、车辆最大加速度以及构建的车辆安全距离模型,输出得到车辆安全防碰撞距离,最终实现车辆防碰撞。
16、作为优选地,所述步骤s31中,选择输入变量和输出变量,基于模糊算法输出当前驾驶员的反应时间以及车辆最大减速度,包括:
17、a.建立路面状况的模糊集以及隶属函数;
18、将路面状况分为冰雪、湿滑、湿以及干燥这四种情况,定义输入量为路面状况的四个模糊子集,同时设定其隶属函数分别如下
19、;
20、其中,为bp神经网络的输出;表示路面状况为冰雪;表示路面状况为湿滑;表示路面状况为湿;表示路面状况为干燥;
21、b.建立最大加速度的模糊集以及隶属函数;
22、根据最大加速度的大小,将最大加速度分为很小、小、较小、中等、较大、大以及很大这七种情况,定义输入量为最大减速度的七个模糊子集,同时设定其隶属函数分别如下
23、;
24、其中,表示车辆加速度;表示车辆加速度很小;表示车辆加速度小;表示车辆加速度较小;表示车辆加速度中等;表示车辆加速度较大;表示车辆加速度大;表示车辆加速度很大;
25、c.建立天气状况的模糊集以及隶属函数
26、将天气状况分为雪、雾、雨以及良好这四种情况,定义输入量为天气状况的四个模糊子集,同时设定其隶属函数分别如下
27、;
28、其中,表示天气状况;表示天气状况为下雪;表示天气状况为雾天;表示天气状况为下雨;表示天气状况为良好;
29、d.建立行车速度的模糊集以及隶属函数
30、根据行车速度的大小,将行车速度分为低、中等、偏高、高以及很高这五种状况,定义输入量为行车速度的五个模糊子集,同时设定其隶属函数分别如下
31、;
32、其中,为车辆行车速度;表示行车速度低;表示行车速度中等;表示行车速度偏高;表示行车速度高;表示行车速度很高;
33、e.建立反应时间的模糊集以及隶属函数
34、将司机的反应时间分为慢、中等以及快这三种情况,定义输入量为反应时间的三个模糊子集,同时设定其隶属函数分别如下
35、;
36、其中,表示司机反应时间;表示司机反应时间快;表示司机反应时间中等;表示司机反应时间慢;
37、f.建立司机反应时间的模糊规则表,输入量为天气状况和行车速度,输出量为司机反应时间,其规则如下表所示
38、;
39、g.建立最大加速度的模糊规则表,输入量为路面状况和行车速度,输出量为最大加速度,其规则如下表所示
40、;
41、h.基于建立的模糊集和隶属度函数,以及构建的司机反应时间模糊规则表以和最大加速度模糊规则表,输出当前驾驶员的反应时间和车辆当前最大加速度。
42、作为优选地,所述步骤s32中,所述建立车辆安全距离模型,包括:
43、假设当前车辆自身的制动距离为,前方车辆的制动距离为,当前车辆与前方车辆的最小车间距为,则有
44、;
45、其中,为车辆安全防碰撞距离;
46、假设当前车辆驾驶员的反应时间和动作时间为,当前车辆和前方车辆的减速度递增时间长度是相等的,均为;
47、当前方车辆为静止状态时,则有
48、;
49、当前方车辆为匀速或加速运动时,则有
50、;
51、当前方车辆处于减速运动时,则有
52、;
53、其中,为前方车辆处于静止状态时,安全防碰撞距离;为前方车辆处于匀速或加速运动时,安全防碰撞距离;为前方车辆处于减速运动时,安全防碰撞距离;为车辆当前自身行驶速度;为前方车辆当前行驶速度;为车辆当前最大加速度;为前方车辆当前最大加速度。
54、作为优选地,所述步骤s1中,加速度传感器固定在车轴上。
55、本发明的有益效果:
56、本发明提出的一种基于路面状态识别的车辆防碰撞方法,本方法通过分析实时路面特征和路面状态,将获得的实时路面状态信息作为防撞预警系统的参数输入,是一种全新的防撞系统的设计思路;同时充分考虑到车辆防碰撞过程中,涉及变量多且情况复杂,具有较大的随机性和模糊性,将路面特征、路面湿滑、天气状况、驾驶员反应速度等量定义模糊子集,编辑合适的模糊规则,采用模糊逻辑算法设定防碰撞参数,能够很好的实现安全距离准确预测及危险状态的预警,提高车辆防碰撞的精度及可靠性。
- 还没有人留言评论。精彩留言会获得点赞!