一种提升高速公路隧道内部瓶颈路段通行能力的控制方法
本发明属于智能交通控制,涉及一种提升高速公路隧道内部瓶颈路段通行能力的控制方法。
背景技术:
1、随着自动驾驶等级不断提升以及蜂窝移动通信系统的c-v2x技术不断完善,可以预见,智能网联汽车(cav)和网联人驾车(chv)组成的混合交通模式即将出现。同时,高速公路隧道的比例逐年提升,其事故发生率明显高于普通高速路段。在因事故导致内部道路缩减形成道路瓶颈的情况下容易引发拥堵或二次事故。因此有必要针对高速公路隧道内部瓶颈路段的安全高效通行问题设计优化改善方法。
2、在现有技术中,针对道路瓶颈问题,相关学者将变限速控制(variblespeedlimit,vsl)作为一种经典的速度协调控制方法,对于道路缩减瓶颈问题具有一定作用。但是,可变限速信息板的大范围铺设,经济性差,而且vsl控制方法高度依赖驾驶人对变速诱导信息的遵从度。公开号为cn114999158a的专利申请公开了一种抑制快速路瓶颈负效应的混合交通众从节流控制方法,该方法在混合交通场景下依托可控cav的节流控制方法,通过在瓶颈路段上游形成cav节流车组,缓和车流对瓶颈路段的直接冲击来保障瓶颈路段的通行能力。该方法取得了一定成效,但并不适用于高速公路隧道场景。
3、因此,需要一种能够有效改善高速公路隧道内部道路瓶颈通行效率和安全性的混合交通流协同控制方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种提升高速公路隧道内部瓶颈路段通行能力的控制方法,针对高速公路隧道场景车流特点,给出了一种适应高速公路隧道内部道路瓶颈通行的协同控制方法,为改善其通行效率和安全性问题提供了新途径。
2、为达到上述目的,本发明提供如下技术方案:
3、一种提升高速公路隧道内部瓶颈路段通行能力的控制方法,具体包括以下步骤:
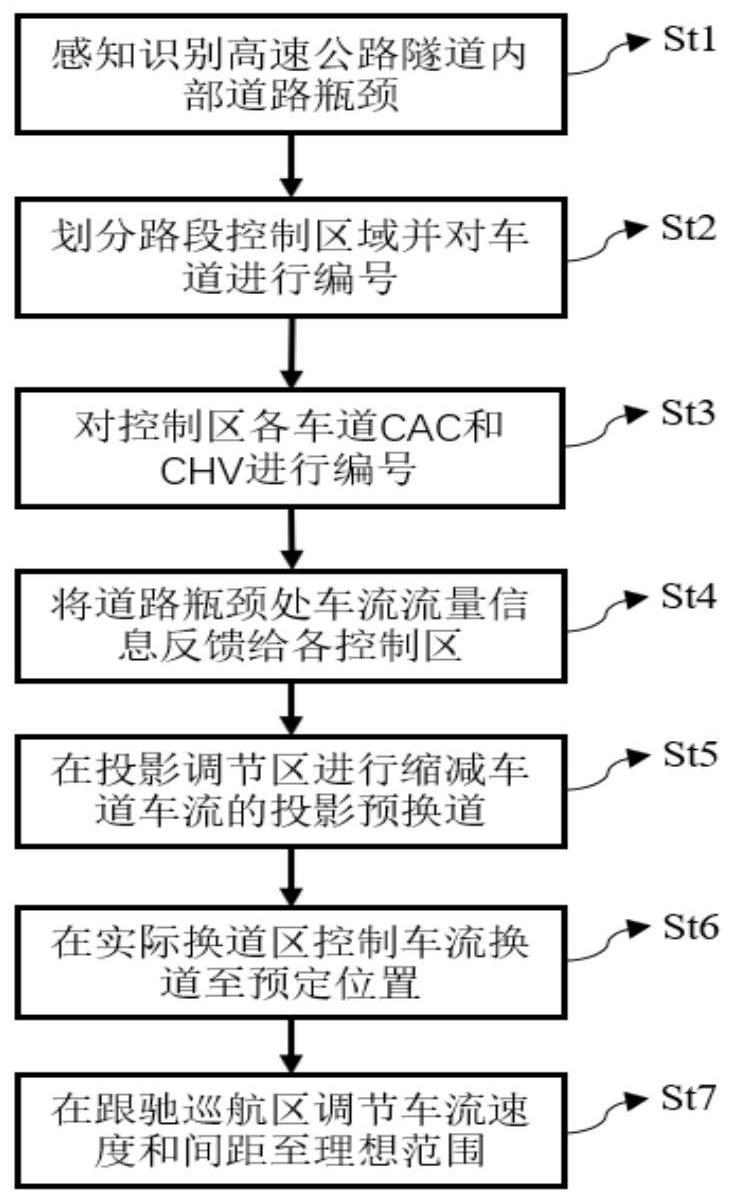
4、s1:感知高速公路隧道内部道路瓶颈的出现,并辨识瓶颈类型和具体位置;
5、s2:将高速公路隧道内部道路瓶颈往上游延伸设定距离的道路从上游向下游划分控制区域,分别为投影调节区、实际换道区、跟驰巡航区和瓶颈区,并对高速公路隧道n个车道按车辆行驶方向从左至右编号为第1车道、第2车道、…、第n车道;
6、s3:在投影调节区,对n个车道上的cav、chv分别编号为1号cav、2号chv、…;其中,cav是网联自动车,chv是网联人驾车;
7、s4:获取设定时间间隔内瓶颈区的车流流量信息;
8、s5:在投影调节区,按照投影算法将缩减车道上的车辆投影至可通行车道形成pv,并对可通行车道上车流速度和间距进行预调节;其中,pv是投影车辆;
9、s6:在实际换道区,按照所设计的换道规则控制缩减车道上的车流换道至预定位置;
10、s7:在跟驰巡航区,控制换道后的混合车流按照设定的跟驰规则执行群体巡航速度调节和车流形态调节。
11、进一步,步骤s2中,根据算法执行时长结合瓶颈区车流道路数据,分别设置投影调节区、实际换道区和跟驰巡航区的长度为x,y,z,单位m;
12、投影调节区定义为:将道路瓶颈上游(y+z)m至(x+y+z)m处设置为投影调节区;在该区域内根据所设计的顺序投影算法,将右侧(n-1)个车道混合车流中的cav和chv按照空间位置顺序投影至可通行第1车道,并对应调节第1车道原有车辆的跟车间距,便于在实际换道区更加顺畅地实现换道;具体实现为:先将该区域内中间车道的车辆按照前后位置顺序插空投影至可通行的第1车道形成投影车辆(pv2-1),形成虚拟车流,在此基础上再按照该方法将最右侧车道车流投影至左侧可通行车道,形成投影车辆(pvn-1);投影算法的实现能够在很短的时间内完成,在此投影换道区域更多的时间和空间是为了预先调整一车道所形成的虚拟车流的跟车间距,便于在实际换道区域其它车道车流换道驶入。工作原理图如图2所示。
13、实际换道区定义为:将道路瓶颈上游ym至(y+z)m处划分为实际换道区;在投影调节区所做工作的基础上,第2、3、…、n车道上的车流按照所优化的换道规则进行换道;具体实现为:中间车道车辆直接执行换道至左侧可通行第1车道;右侧第n车道车辆先换道至中间第(n-1)车道过渡,再多次执行换道规则,直至左侧可通行第1车道;工作原理图如图2所示。
14、跟驰巡航区定义为:将道路瓶颈上游0至z处划分为跟驰巡航区;该区域主要执行跟驰算法,将完成换道后的车流调节至预置的跟车间距和队列巡航速度;因为在通过瓶颈路段时,可能会因为驾驶环境变差,驾驶人心理紧张等原因致使通行车流减速,所以为了降低道路瓶颈处后车对前车的冲击,保证车流通过的稳定性,在跟驰调节区提前调节跟车间距和巡航速度至理想范围。
15、进一步,步骤s5中,借助信息物理系统(cps)理念,在投影调节区,将缩减车道上的车辆投影至可通行车道形成pv,并对投影完成后在可通行车道形成的虚拟车流的速度和间距调节,具体是:通过广泛采集投影调节区域各车道车辆位置和速度数据,结合道路瓶颈类型数据和车流流量数据,形成数字层(cyber system),通过中央数据处理器进行计算并做出决策,并对投影调节区车辆和道路形成的物理层(pysical system)进行闭环控制。
16、进一步,步骤s6中,所设计的换道规则是针对高速公路隧道车流特征,考虑了换道动机、换道安全条件、换道概率和具体换道模型;
17、所述换道动机为:
18、d0>di
19、
20、其中,d0表示当前车道车辆与左侧相邻车道前车的车头间距;di表示当前车道车辆与本车道前车的车头间距,lencar表示车辆车身长度,di-lencar表示车辆间的纵向安全距离;v(t)表示当前车辆速度,表示车辆最大速度值;该式表示当前车道前方受阻而左侧相邻车道有更大的安全空间时,会产生换道动机;
21、所述换道安全条件为:
22、dh-lencar>v(t)h
23、其中,dh表示当前车道车辆与左侧车道后方车辆的安全间距,v(t)h表示左侧车道后方车辆的当前速度;该式表示车辆换道行为对于左侧车道后方来车不会造成威胁,换道安全条件满足;
24、当车辆同时满足换道动机和换道安全条件时,车辆将会以一定概率换道;所述具体换道模型为:
25、
26、d_l_f>di
27、d_l_h-lencar>v(t)h
28、rand(1)≤plc
29、其中,d_l_f表示左侧车道前方车辆与当前车道车辆的车头间距;d_l_h表示左侧车道后方车辆与当前车道车辆的车头间距;v(t)h表示左侧车道后方车辆的当前速度;rand(1)为计算机随机生成概率;plc表示符合换道动机和安全条件的情况下车辆向左侧换道发生的概率。
30、进一步,步骤s7中,所述跟驰规则是针对瓶颈路段通行特征,考虑了慢启动过程、随机慢化过程、反应时间的位置更新、加速过程和减速过程;
31、所述慢启动过程具体为:
32、vicav(t)=0且rand(1)<pslow,vicav(t+1)=0
33、vichv(t)=0且rand(1)<pslow,vichv(t+1)=0
34、其中,vicav(t)和vichv(t)分别表示在t时刻第i辆cav和第i辆chv的速度大小;pslow表示慢启动概率,rand(1)为计算机随机生成概率;当车辆速度降为0时,不会立即加速到原有速度,而是存在一段时间的延迟,当下一时刻车速仍为0时,则近似认为车辆慢启动延迟为1秒;
35、所述随机慢化过程具体为:
36、vicav(t+1)=max(vicav(t)-bicav,0)
37、vichv(t+1)=max(vichv(t)-bichv,0)
38、该式用来表征车辆因驾驶员驾驶习惯或车流情况进行的随机减速行为,更加真实的还原瓶颈道路通行真实行驶情况;
39、所述反应时间的位置更新具体为:
40、xicav(t+1)=xicav(t)+(1+τ)vicav(t)
41、xichv(t+1)=xichv(t)+(1+τ)vichv(t)
42、其中,xicav(t)和xichv(t)分别表示在t时刻第i辆cav和第i辆chv的当前位置;xicav(t+1)和xichv(t+1)分别表示考虑反应时间的第i辆cav和第i辆chv的下一时刻的位置;τ表示cav执行系统或者chv驾驶员的反应延迟时间;
43、所述加速过程具体为:
44、vicav(t+1)=min(vicav(t)+aicav,vmax_cav,di(t)-lencav)
45、vichv(t+1)=min(vichv(t)+aichv,vmax_chv,di(t)-lenchv)
46、其中,vicav(t)和vichv(t)分别表示在t时刻第i辆cav和第i辆chv的速度大小;vmax_cav和vmax_chv分别表示cav和chv的最大行驶速度值;aicav和aichv分别表示第i辆cav和第i辆chv的加速度值;di(t)表示当前车辆与前方车辆的车头间距;lencav和lenchv表示两种车辆的车长,因此di(t)-lencav、di(t)-lenchv即表示当前车辆与前方社会车辆的安全间距;该式表示车辆在加速过程中,车辆下一时刻的速度取值不超过最小安全间距,以免发生追尾;
47、所述减速过程具体为:
48、vicav(t+1)=min(vicav(t)-bicav,di(t)-lencav)
49、vichv(t+1)=min(vichv(t)-bichv,di(t)-lenchv)
50、其中,bicav、bichv分别表示第i辆cav和第i辆chv减速时的加速度大小;同样,减速过程中的最大速度同样不能超过最小安全间距。
51、本发明的有益效果在于:
52、本发明针对高速公路隧道内部道路瓶颈通行难题,考虑其换道难度高、车速快、跟车安全间距大等道路车流特征,在网联自动车(cav)和网联人驾车(chv)组成的混合交通流模式下,借助信息物理系统(cps)理念,设计了投影换道协同通行方法,该方法能够有效改善道路瓶颈处车流通行的效率和安全性。
53、另外,本发明的控制方法在保证瓶颈区通行效率的基础上兼顾行车安全和车流稳定性,既改善了道路瓶颈处通行效果,又提高了驾驶体验。可以在传统交通系统与智能化技术融合初期提供新的控制思路。
54、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!