车辆路口决策方法、装置、设备及存储介质与流程
本公开涉及自动驾驶,尤其涉及一种车辆路口决策方法、装置、设备及存储介质。
背景技术:
1、随着多样化交通需求的产生,自动驾驶技术逐渐得到更广泛的应用。自动驾驶技术在应用中的一个重要难点是在交叉路口的行驶。由于不论是在城市道路环境还是在封闭园区,交叉路口都是有人驾驶车辆、无人驾驶车辆、人员汇集、转向和疏散的必经之地,影响车辆安全的因素较多,决策难度较大,很容易出现安全隐患。尤其对于无信号灯的路口来说,更是环境复杂,给自动驾驶车辆安全效率通行带来巨大挑战。
2、现有技术中,自动驾驶车辆在路口行驶时的决策主要是结合路口信号灯来判断进行的,在无信号灯的路口的决策为基于学习的决策方法,但这类方法的结果稳定性不足,无法保证自动驾驶车辆行驶的安全性。
技术实现思路
1、本公开提供了一种车辆路口决策方法、装置、设备及存储介质,以解决现有技术中自动驾驶车辆通过无信号灯交叉路口时缺乏稳定可靠的决策方法的问题。
2、第一方面,本公开提供了一种车辆路口决策方法,车辆路口决策方法包括:
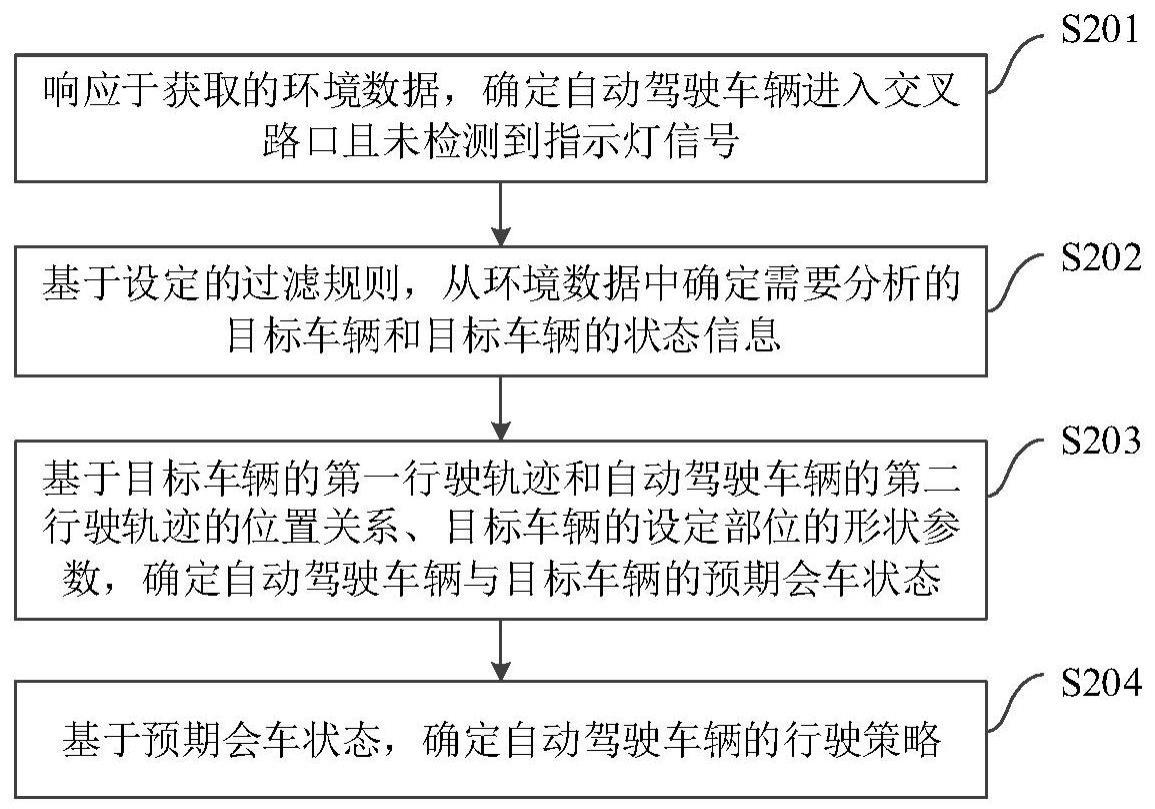
3、响应于获取的环境数据,确定自动驾驶车辆进入交叉路口且未检测到指示灯信号;
4、基于设定的过滤规则,从环境数据中确定需要分析的目标车辆和目标车辆的状态信息,状态信息包括目标车辆的第一行驶轨迹和设定部位的形状参数;
5、基于目标车辆的第一行驶轨迹和自动驾驶车辆的第二行驶轨迹的位置关系、目标车辆的设定部位的形状参数,确定自动驾驶车辆与目标车辆的预期会车状态;
6、基于预期会车状态,确定自动驾驶车辆的行驶策略。
7、可见,通过响应于获取的环境数据,确定自动驾驶车辆进入交叉路口且未检测到指示灯信号,再基于设定的过滤规则,从环境数据中确定需要分析的目标车辆和目标车辆的状态信息,然后基于目标车辆的第一行驶轨迹、设定部位的形状参数和自动驾驶车辆的第二行驶轨迹的位置关系,确定自动驾驶车辆与目标车辆的预期会车状态,最后基于预期会车状态,确定自动驾驶车辆的行驶策略。由此,在无指示灯的路口也能有效识别影响无人驾驶车辆行驶的目标车辆,并能根据目标车辆的行驶状态和结构特征,确定自动驾驶车辆是否需要减速、避让等行驶策略,由此,使无人驾驶车辆在无指示灯的路口,也能有可靠规则保证行驶的安全性,且通过筛选目标车辆并据此确定行驶策略,在保证车辆行驶安全性的同时,不受过多环境因素的影响,保证自动驾驶车辆通过路口的行驶效率和安全性。
8、可选地,基于目标车辆的第一行驶轨迹和自动驾驶车辆的第二行驶轨迹的位置关系、目标车辆的设定部位的形状参数,确定自动驾驶车辆与目标车辆的预期会车状态,包括:基于目标车辆的类型,将目标车辆宽度最大的目标结构确定为设定部位;以第一行驶轨迹上的点为圆心,基于目标结构的宽度和设定膨胀宽度,生成第一行驶轨迹对应的轨迹膨胀圆,设定膨胀宽度基于目标车辆的类型确定;基于第二行驶轨迹与轨迹膨胀圆的交点,确定预期会车状态。
9、可见,通过结合第一行驶轨迹的轨迹膨胀圆和第二行驶轨迹的交点确定预期会车状态,从而能够图形化地准确确定自动驾驶车辆与目标车辆会车时的可能状态,通过多个参数共同确定轨迹膨胀圆,以充分考虑目标车辆的结构特征,进而保证会车时可能状态确定的准确性,进而能够据此准确确定行驶策略,以保证自动驾驶车辆行驶的安全性。
10、可选地,基于第二行驶轨迹与轨迹膨胀圆的交点,确定预期会车状态,包括:确定第二行驶轨迹和第一行驶轨迹的相交点;确定轨迹膨胀圆和第二行驶轨迹的相切点;将相交点和相切点中到自动驾驶车辆最近的一个点,确定为冲突点;基于目标车辆行动状态、自动驾驶车辆行动状态和冲突点,确定预期会车状态。
11、可见,通过从多个相交点和相切点中确定冲突点,并基于冲突点确定预期会车状态,以确定发生时间最早的预期会车状态下自动驾驶车辆和目标车辆的位置,以有效规避最紧急的危险,保证自动驾驶车辆行驶的安全性。
12、可选地,目标车辆行动状态包括目标车辆的第一速度,自动驾驶车辆行动状态包括自动驾驶车辆的第二速度,基于目标车辆行动状态、自动驾驶车辆行动状态和冲突点,确定预期会车状态,包括:基于第二速度,确定自动驾驶车辆的头部到达冲突点的第一时刻;基于第一速度,确定目标车辆头部到达冲突点的第二时刻和车尾到达冲突点的第三时刻;若第二时刻与第一时刻的差值大于第一时间阈值,确定预期会车状态为自动驾驶车辆先通过冲突点且与目标车辆不会发生碰撞;或者,若第一时刻与第三时刻的差值大于第二时间阈值,确定预期会车状态为目标车辆先通过冲突点且与自动驾驶车辆不会发生碰撞;或者,若第一时刻与第二时刻的差值小于第一时间阈值,确定预期通过状态为目标车辆与自动驾驶车辆会出现碰撞。
13、可见,根据不同的目标车辆和自动驾驶车辆行驶状态,可以准确确定不同的预期会车状态,进而提前规避可能发生的碰撞,保证自动驾驶车辆行驶的安全性。
14、可选地,基于预期会车状态,确定自动驾驶车辆的行驶策略,包括:若预期会车状态为自动驾驶车辆与目标车辆不会发生碰撞,确定行驶策略为保持当前行驶状态;若预期会车状态为目标车辆与自动驾驶车辆会出现碰撞,基于目标车辆的第一速度和第一行驶轨迹,确定自动驾驶车辆的行驶策略。
15、可见,根据目标车辆和自动驾驶车辆是否会发生碰撞以确定行驶策略,在不发生碰撞危险时保持行驶状态,避免无效调整,提高自动驾驶车辆的行驶效率和稳定性。
16、可选地,若预期会车状态为目标车辆与自动驾驶车辆会出现碰撞,基于目标车辆的第一速度和第一行驶轨迹,确定自动驾驶车辆的行驶策略,包括:若第一速度高于设定的第一速度阈值,则基于设定的减速度参数,调整行驶速度,直至目标车辆先通过冲突点且与自动驾驶车辆不会发生碰撞;若第一速度低于设定的第一速度阈值,则基于目标车辆与冲突点的距离与第一速度,确定安全交会时刻;基于自动驾驶车辆的所在位置和安全交会时刻,重新确定行驶速度。
17、可见,通过不同行驶策略,可以有效规避不同场景下的碰撞风险,充分保证自动驾驶车辆的行驶安全性。
18、可选地,基于设定的过滤规则,从环境数据中确定需要分析的目标车辆和目标车辆的状态信息,包括:过滤与自动驾驶车辆距离大于第一设定距离阈值的车辆;基于自动驾驶车辆的行驶方向,过滤环境数据中识别到的位于自动驾驶车辆后方的车辆;若自动驾驶车辆的行驶方向为直行,则过滤环境数据中识别到的与自动驾驶车辆同向的车辆;或者,若自动驾驶车辆的行驶方向为左转,则过滤环境数据中识别到的位于自动驾驶车辆右侧的同向直行的车辆或右转车辆;或者,若自动驾驶车辆的行驶方向为右转,则过滤环境数据中识别到的位于自动驾驶车辆左侧的同向直行的车辆或左转车辆;将过滤后的车辆中与自动驾驶车辆的行驶方向夹角位于设定角度范围的车辆,确定为需要分析的目标车辆;基于环境数据,获取目标车辆的状态信息。
19、可见,通过不同过滤规则,能够从环境数据中准确找出对自动驾驶车辆行驶存在安全风险的目标车辆,以基于目标车辆的状态信息进一步分析,降低数据获取量要求,提高处理效率,同时保证自动驾驶车辆的行驶安全性。
20、可选地,基于预期会车状态,确定自动驾驶车辆的行驶策略,还包括:在第二行驶轨迹中存在速度小于第二速度阈值的障碍物且与自动驾驶车辆的距离小于第二设定距离阈值时,确定自动驾驶车辆的行驶策略为刹车至停止状态;基于自动驾驶车辆的形状参数和设定车身延长量,得到第二行驶轨迹对应的行驶覆盖范围,并在行驶覆盖范围与目标车辆的第一行驶轨迹存在部分重叠时,确定自动驾驶车辆的行驶策略为刹车至停止状态;若目标车辆与自动驾驶车辆的距离小于第三设定距离阈值,确定自动驾驶车辆的行驶策略为基于设定减速度刹车。
21、可见,通过在不同特殊情况下采取减速刹车或停止的行驶策略,有效保证不同环境下自动驾驶车辆的行驶安全性。
22、第二方面,本公开提供了一种车辆路口决策装置,该车辆路口决策装置包括:
23、环境识别模块,用于响应于获取的环境数据,确定自动驾驶车辆进入交叉路口且未检测到指示灯信号;
24、目标识别模块,用于基于设定的过滤规则,从环境数据中确定需要分析的目标车辆和目标车辆的状态信息,所述状态信息包括目标车辆的第一行驶轨迹和设定部位的形状参数;
25、分析模块,用于基于目标车辆的第一行驶轨迹和自动驾驶车辆的第二行驶轨迹的位置关系、目标车辆的设定部位的形状参数,确定自动驾驶车辆与目标车辆的预期会车状态;
26、处理模块,用于基于所述预期会车状态,确定自动驾驶车辆的行驶策略。
27、可选地,分析模块具体用于,基于目标车辆的类型,将目标车辆宽度最大的目标结构确定为设定部位;以第一行驶轨迹上的点为圆心,基于目标结构的宽度和设定膨胀宽度,生成第一行驶轨迹对应的轨迹膨胀圆,设定膨胀宽度基于目标车辆的类型确定;基于第二行驶轨迹与轨迹膨胀圆的交点,确定预期会车状态。
28、可选地,分析模块具体用于,确定第二行驶轨迹和第一行驶轨迹的相交点;确定轨迹膨胀圆和第二行驶轨迹的相切点;将相交点和相切点中到自动驾驶车辆最近的一个点,确定为冲突点;基于目标车辆行动状态、自动驾驶车辆行动状态和冲突点,确定预期会车状态。
29、可选地,分析模块具体用于,若目标车辆行动状态包括目标车辆的第一速度,自动驾驶车辆行动状态包括自动驾驶车辆的第二速度,基于第二速度,确定自动驾驶车辆的头部到达冲突点的第一时刻;基于第一速度,确定目标车辆头部到达冲突点的第二时刻和车尾到达冲突点的第三时刻;若第二时刻与第一时刻的差值大于第一时间阈值,确定预期会车状态为自动驾驶车辆先通过冲突点且与目标车辆不会发生碰撞;或者,若第一时刻与第三时刻的差值大于第二时间阈值,确定预期会车状态为目标车辆先通过冲突点且与自动驾驶车辆不会发生碰撞;或者,若第一时刻与第二时刻的差值小于第一时间阈值,确定预期通过状态为目标车辆与自动驾驶车辆会出现碰撞。
30、可选地,处理模块具体用于,若预期会车状态为自动驾驶车辆与目标车辆不会发生碰撞,确定行驶策略为保持当前行驶状态;若预期会车状态为目标车辆与自动驾驶车辆会出现碰撞,基于目标车辆的第一速度和第一行驶轨迹,确定自动驾驶车辆的行驶策略。
31、可选地,处理模块具体用于,若第一速度高于设定的第一速度阈值,则基于设定的减速度参数,调整行驶速度,直至目标车辆先通过冲突点且与自动驾驶车辆不会发生碰撞;若第一速度低于设定的第一速度阈值,则基于目标车辆与冲突点的距离与第一速度,确定安全交会时刻;基于自动驾驶车辆的所在位置和安全交会时刻,重新确定行驶速度。
32、可选地,目标识别模块具体用于,过滤与自动驾驶车辆距离大于第一设定距离阈值的车辆;基于自动驾驶车辆的行驶方向,过滤环境数据中识别到的位于自动驾驶车辆后方的车辆;若自动驾驶车辆的行驶方向为直行,则过滤环境数据中识别到的与自动驾驶车辆同向的车辆;或者,若自动驾驶车辆的行驶方向为左转,则过滤环境数据中识别到的位于自动驾驶车辆右侧的同向直行的车辆或右转车辆;或者,若自动驾驶车辆的行驶方向为右转,则过滤环境数据中识别到的位于自动驾驶车辆左侧的同向直行的车辆或左转车辆;将过滤后的车辆中与自动驾驶车辆的行驶方向夹角位于设定角度范围的车辆,确定为需要分析的目标车辆;基于环境数据,获取目标车辆的状态信息。
33、可选地,处理模块还包括,在第二行驶轨迹中存在速度小于第二速度阈值的障碍物且与自动驾驶车辆的距离小于第二设定距离阈值时,确定自动驾驶车辆的行驶策略为刹车至停止状态;基于自动驾驶车辆的形状参数和设定车身延长量,得到第二行驶轨迹对应的行驶覆盖范围,并在行驶覆盖范围与目标车辆的第一行驶轨迹存在部分重叠时,确定自动驾驶车辆的行驶策略为刹车至停止状态;若目标车辆与自动驾驶车辆的距离小于第三设定距离阈值,确定自动驾驶车辆的行驶策略为基于设定减速度刹车。
34、第三方面,本公开还提供了一种控制设备,该控制设备包括:
35、至少一个处理器;
36、以及与至少一个处理器通信连接的存储器;
37、其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使控制设备执行如本公开第一方面中任一实施例对应的车辆路口决策方法。
38、第四方面,本公开还提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如本公开第一方面任一的车辆路口决策方法。
39、第五方面,本公开还提供了一种计算机程序产品,该程序产品包含计算机执行指令,所述计算机执行指令被处理器执行时用于实现如本公开第一方面对应的任意实施例的车辆路口决策方法。
- 还没有人留言评论。精彩留言会获得点赞!