一种基于BP神经网络的智能交通控制系统及其控制方法
本发明涉及智能交通控制,具体是一种基于bp神经网络的智能交通控制系统及其控制方法。
背景技术:
1、智能交通控制是一种基于先进的信息技术和智能化技术,通过实时监测和分析交通流量、交通状况等数据信息,对交通信号灯进行智能化控制,从而提高交通调度效率,减少车辆等待时间,节约能源,保护环境,随着汽车工业的发展和城市交通流量的增加,传统的“固定时间”配时控制器已经不能满足客观需要,为了更好地调度交通流,多时段多方案的信号控制器开始出现并逐步取代了传统的只有一种控制方案的固定时间配时控制器。然而,这种控制方案仍然存在一些不足,例如无法根据实际交通流量智能调整绿灯时间的长短,不能减少车辆在交叉口的时间延误;为了解决这些问题,感应式交通控制器应运而生,这种控制器可以根据检测器测量的交通流量智能调整绿灯时间的长短,使绿灯时间更有效地被利用,从而减少车辆在交叉口的时间延误,具有更大的灵活性。
2、目前,主要使用的是环形线圈车辆检测器,但是这种方式在车辆采集和预测交通流量存在不足,因此,为了进一步提高交通调度效率,需要采用更先进的技术,如bp神经网络控制预测算法,来预测车辆通行时间和交通流量,并根据预测结果进行车辆配时方案的控制,以实现更加准确地控制交通流的效果,减少车辆等待时间是极为必要的,基于此,我们提出一种基于bp神经网络的智能交通控制系统及其控制方法来解决现有技术中的不足。
技术实现思路
1、本发明的目的在于提供一种基于bp神经网络的智能交通控制系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于bp神经网络的智能交通控制系统,包括交通控制器硬件和基于十字路口的bp神经网络模型,所述交通控制器硬件包括硬件黄闪模块、主控模块、驱动模块、dsp处理器和图像采集模块,所述驱动模块设置有四个,所述基于十字路口的bp神经网络模型包括输入层、隐含层和输出层,所述基于十字路口的bp神经网络模型包含有四个输入神经元和四个输出神经元,其中四个输入节点为cn、cw、cs和ce,cn、cw、cs和ce分别代表北向、西向、南向和东向等待通行的车辆数,四个输出节点为tn、tw、ts和te,tn、tw、ts和te分别代表北向、西向、南向和东向等待车辆完全通过所用的时间,所述隐含层神经元个数为9个。
4、作为本发明进一步的方案:所述主控模块提供以太网接口,方便连接上位机软件,四个所述驱动模块用于提供16组信号输出。
5、作为本发明再进一步的方案:所述图像采集模块利用视频进行车辆图像的采集,所述dsp处理器用于对图像进行处理分离出停车等待的车辆数,并使用经过训练后的bp神经网络控制算法预测该停车等待的车辆所需通行时间,来达到预测交通流量和提高车辆通行效率。
6、作为本发明再进一步的方案:所述图像采集模块通过dsp处理器连接主控模块,其中dsp处理器与主控模块之间通过rs485进行连接,四个驱动模块通过can总线连接主控模块,所述主控模块通过网络实现与上位机软件的连接,所述硬件黄闪模块通过脉冲信号连接主控模块,通过上位机软件进行通信和控制。
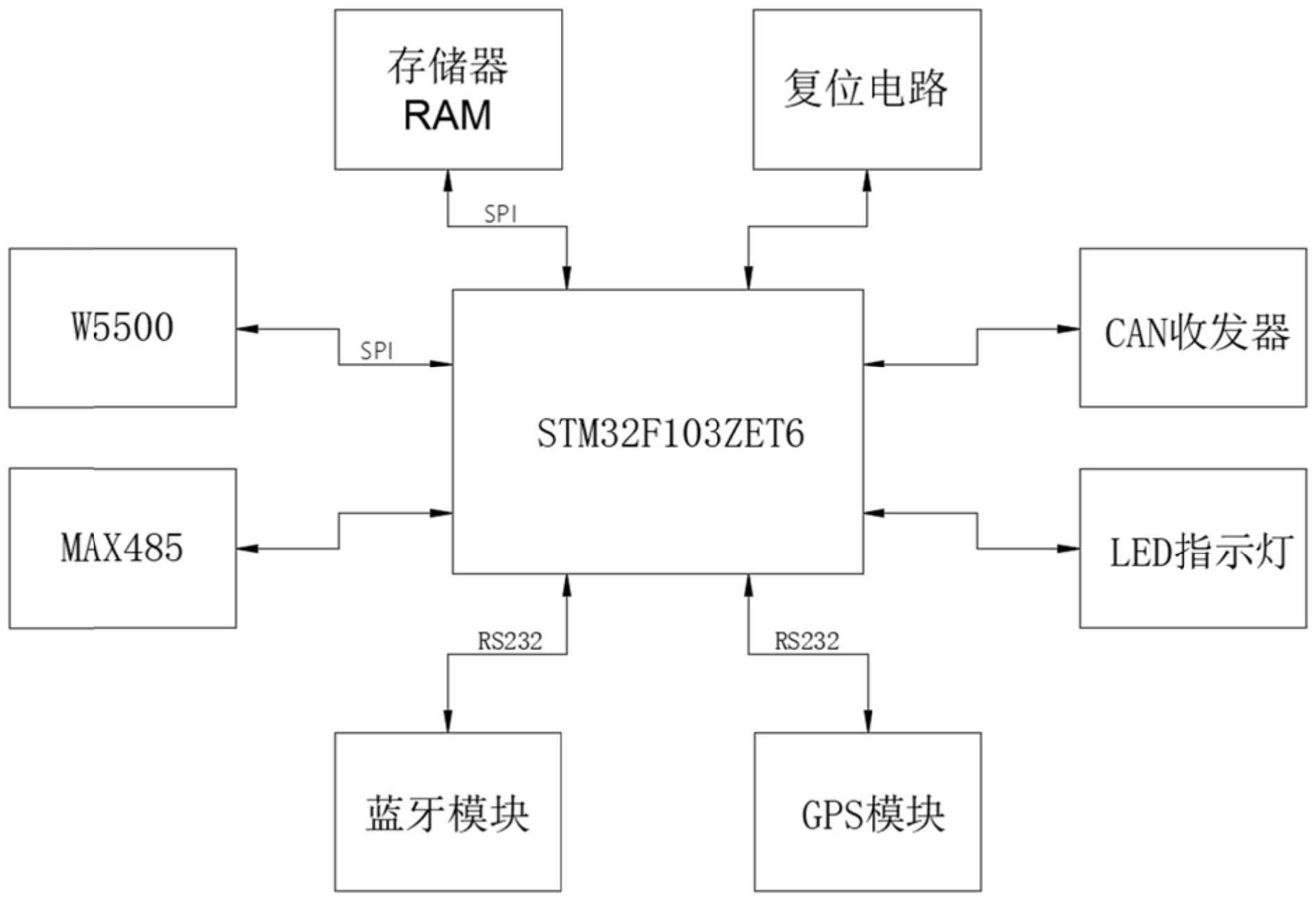
7、作为本发明再进一步的方案:所述主控模块包括w5500芯片、max485收发器、蓝牙模块、gps模块、led指示灯、can收发器、复位电路、存储器和stm32f103zet6芯片。
8、作为本发明再进一步的方案:所述w5500芯片通过spi线与stm32f103zet6芯片连接,所述max485收发器与stm32f103zet6芯片连接,所述蓝牙模块通过rs232线与stm32f103zet6芯片连接,所述gps模块通过rs232线与stm32f103zet6芯片连接,所述led指示灯与stm32f103zet6芯片连接,所述can收发器与stm32f103zet6芯片连接,所述复位电路与stm32f103zet6连接,所述ram存储器通过spi线与stm32f103zet6芯片连接。
9、作为本发明再进一步的方案:所述驱动模块包括双向可控硅bta06、moc3051光耦、三极管q11和双向光耦pc814,所述三极管q11为pnp型的三极管,所述三极管q11的基极连接电阻r50,所述r50的另外一端连接单片机的一个驱动引脚,所述三极管q11的集电极连接电源vcc,所述三极管q11的发射极连接到moc3051光耦的1号脚,所述moc3051光耦的2号脚连接电阻r51,所述电阻r51的另外一个脚连接到地,所述moc3051光耦的6号脚连接电阻r53,电阻r53的另外一个脚连接到火线l上,所述moc3051光耦的4号脚连接到双向可控硅bta06的3号脚,同时moc3051光耦的4号脚连接到电阻r55上,电阻r55的另外一个脚连接到双向可控硅bta06的1号脚,所述双向可控硅bta06的2号脚连接到火线l上,所述双向可控硅bta06的1号脚同时连接电容c25的一个脚,电容c25的另一个脚连接到电阻r56的一个引脚,电阻r56的另外一个引脚连接到火线l上,双向可控硅bta06的1号脚连接双向光耦pc814的1号脚,所述双向光耦pc814的2号脚连接到两端口的接插件的2号脚,所述双向光耦pc814的3号脚连接电阻r58,r58连接到地,同时r58并联电容c27,所述双向光耦的3号脚输出信号in9送到单片机,用以判断电路是否出现故障,双向光耦的4号脚连接至电源vcc。
10、作为本发明再进一步的方案:所述硬件黄闪模块用于应对系统出现故障,其主要控制功能是以1秒为周期闪烁四个路口的所有黄色信号灯,提醒车辆驾驶员减速慢行、注意交通安全,所述硬件黄闪模块包括cd74hc123、sn74hc74n和hcf4060be,所述cd74hc123是一种具有复位功能的高速cmos逻辑双路可重触发单稳多频振荡器,其主要作用是控制sn74hc74n是否输出1hz方波信号,所述sn74hc74n是一种具有清零和预设功能的双路d类上升沿触发器,当输入的控制信号为高电平时,始终输入引脚上的上升沿将触发其输出引脚状态的改变,所述hcf4060be是一种14级文波二进制计数器和振荡器,其主要作用是产生2hz方波信号提供给sn74hc74n,在所述硬件黄闪模块中,当主控模块向cd74hc123输入脉冲信号时,cd74hc123输出的控制信号为低电平,sn74hc74n不输出1hz方波信号,此时黄闪驱动电路不工作,当主控模块出现故障,不向cd74hc123输入方波信号时,控制信号为高电平,此时黄闪驱动电路开始工作,控制所有黄色信号灯闪烁。
11、本发明还提供了一种基于bp神经网络的智能交通控制方法,包含以下步骤:
12、s1:建立基于十字路口的bp神经网络模型,包括输入层、隐含层和输出层,其中,输入层节点数为4个,分别代表北向、西向、南向、东向等待通行的车辆数,输出层节点数为4个,分别代表北向、西向、南向、东向等待车辆完全通过所用的时间,隐含层神经元个数为9个;
13、s2:通过收集一定数量的训练样本,对十字路口神经网络模型进行训练,使其能够根据车辆等待通行的数量智能预测所需通行的时间;
14、s3:利用视频进行车辆图像的采集,使用dsp处理器对图像进行处理并分离出停车等待的车辆数;
15、s4:dsp处理器运用经过训练后的bp神经网络预测该停车等待的车辆所需通行时间,根据预测结果进行车辆配时方案的控制,实现实时控制交通流的效果,提高交通调度效率,减少车辆等待时间,节约能源,保护环境,主控模块提供以太网接口,方便连接上位机软件,四个驱动模块用于提供16组信号输出,在系统出现故障时,系统转为硬件黄闪状态,可以保证道路安全畅通,对交通流量进行实时监测和分析,根据需要进行优化和调整,以进一步提高交通调度效率。
16、与现有技术相比,本发明的有益效果是:
17、1、本发明中,通过使用bp神经网络控制预测算法,交通控制器可以通过图像采集模块采集车辆图像,并利用经过训练后的bp神经网络控制算法预测车辆通行时间,从而可以更加精确地预测车辆通行时间,进而在交通灯控制器中更加准确地控制红绿灯变换,提高车辆通行效率。
18、2、本发明中,通过利用视频进行车辆图像的采集,并使用dsp处理器对图像进行处理,可以分离出停车等待的车辆数,同时,dsp处理器运用经过训练后的bp神经网络预测该停车等待的车辆所需通行时间,从而提前预测道路的车辆通行时间和高峰期,从而可以更加准确地预测车辆通行时间和交通流量,进而在交通控制中更加精确地控制红绿灯变换,提高交通调度效率。
19、3、本发明中的基于bp神经网络的智能交通控制系统可以实时控制交通流通,提高交通调度效率,减少车辆等待时间,节约能源,保护环境,同时,bp神经网络控制预测算法可以更加准确地预测车辆通行时间和交通流量,从而在交通控制中更加精确地控制红绿灯变换,进一步提高交通流通效率。
- 还没有人留言评论。精彩留言会获得点赞!