一种考虑出行补贴的网联车路径控制方法
本发明涉及智能交通,特别涉及一种考虑出行补贴的网联车路径控制方法。
背景技术:
1、智能网联汽车(以下简称网联车)是指搭载先进的车载传感器、控制器、执行器等装置,既具备与路端、云端实时信息交互的联网功能,又具备复杂环境感知、智能决策、协同控制等自动驾驶功能的新一代汽车。网联车驾驶行为的高度可控性给交通拥堵管理提供了新的思路:通过规划并控制部分网联车的出行路径间接影响其他车辆的路径选择,将路网流量分布调节至预期形式,从而实现对路网性能的优化。以上问题称为网联车路径控制问题,包括需要控制的网联车数量、受控网联车出行路径在内的控制策略由管理部门根据其管理目标确定。
2、路径控制方案会要求部分受控制车辆选择旅行时间较长但流量较少的系统最优路径完成出行,以增加部分用户出行成本为代价实现路网流量的均衡分布。这一特征可能会成为其在现实中的实施阻碍。因此,如何克服路径控制的上述实施阻碍,提高路径控制方案的可行性,为智能交通领域亟需解决的问题。
技术实现思路
1、发明目的:针对以上问题,本发明目的是提供一种考虑出行补贴的网联车路径控制方法,通过控制部分网联车用户的路径选择间接影响其他用户的路径选择,实现路网通行效率的提升,同时为因路径控制方案而承受出行效用损失的用户提供出行补贴。
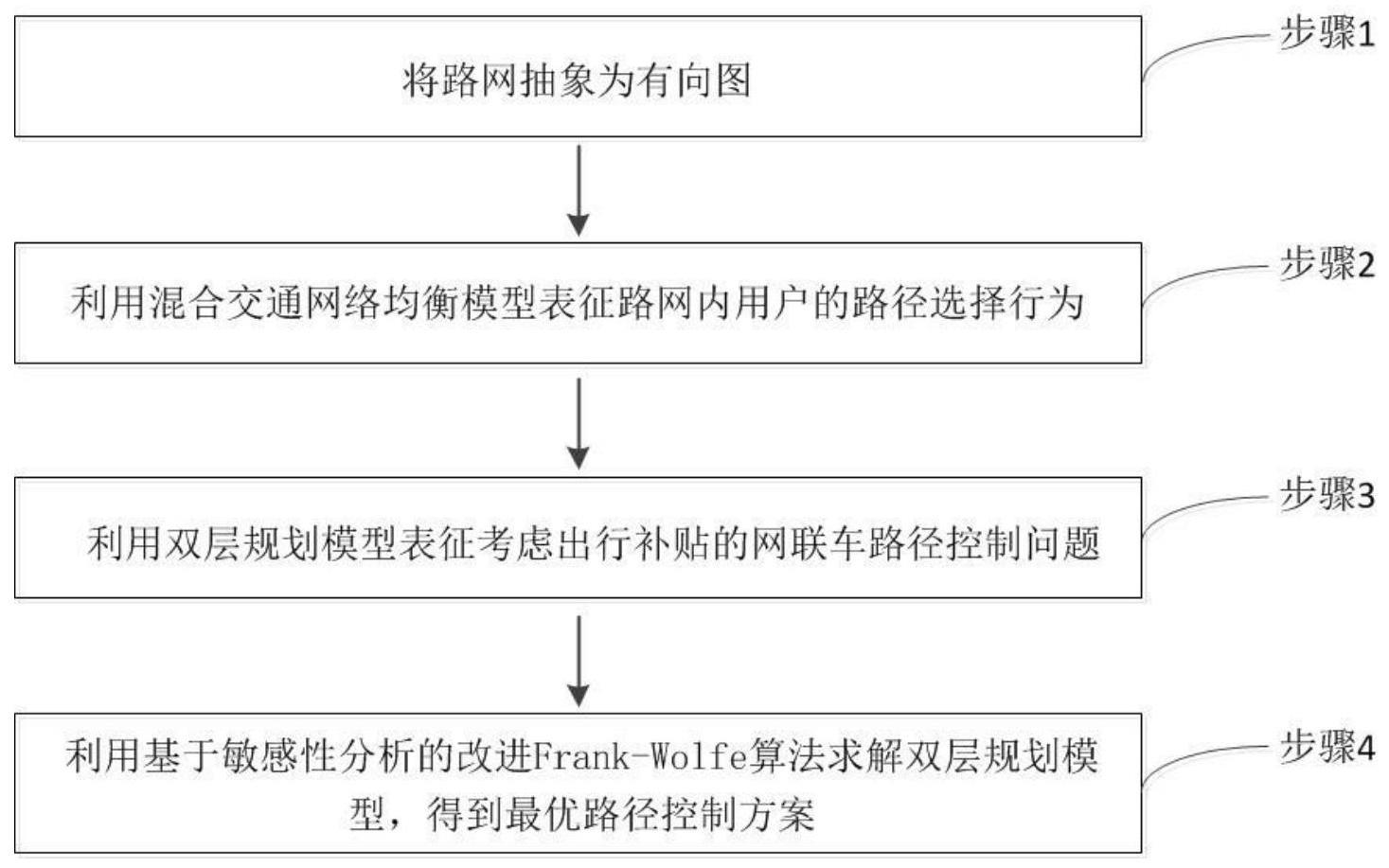
2、技术方案:本发明的一种考虑出行补贴的网联车路径控制方法,包括以下步骤:
3、步骤1,将路网抽象为有向图;
4、步骤2,利用混合交通网络均衡模型表征路网内用户的路径选择行为;
5、步骤3,利用双层规划模型表征考虑出行补贴的网联车路径控制问题;
6、步骤4,利用基于敏感性分析的改进frank-wolfe算法求解双层规划模型,得到最优路径控制方案。
7、进一步,步骤1具体包括:
8、将路网抽象为一个强连通的有向图g=(n,a),其中n表示节点集合,a表示路段集合,根据路径选择行为划分,路网中共有两类用户,分别为选择最短路径的用户均衡用户和选择系统最优路径的系统最优用户,将两类用户分别用角标1和2表示,用户类别集合用m={1,2}表示。
9、进一步,步骤2具体包括以下过程:
10、根据路段与路径流量关系,以及出行需求与路径流量关系,将用户类别m的流量可行集表示为:
11、
12、其中,表示用户类别m的出行需求向量,表示总需求向量,两者满足w表示路网od对集合,任意od对w∈w的路径集合r∈rw,所有路径的集合为r,为用户类别m的路段流量向量,为路径流量向量,路段总流量向量为路径总流量向量为表示路段-路径关系矩阵,其元素δa,r=1表示路段a属于路径r,δa,r=0表示路段a不属于路径r;表示od-路径关系矩阵,其元素λw,r=1表示路径r属于od对w,λw,r=0表示路径r不属于od对w;
13、令表示路段旅行时间,定义路段旅行时间表达式为:
14、
15、式中,和ca分别表示路段a的自由流旅行时间和道路通行能力,α和β为函数参数;
16、令表示路径旅行时间向量,根据路段与路径旅行时间关系,满足c=δtt;
17、定义路段边际旅行时间表达式为:
18、
19、则路段边际旅行时间向量形式为
20、用混合交通网络均衡模型表征路网中ue和so两类用户路径选择行为,表示为以下变分不等式问题:
21、求解使其满足以下条件:
22、
23、式中的可行集ω(d1,d2)表达式为:
24、ω(d1,d2)=ω1×ω2={(x1,x2)|x1∈ω1(d1),x2∈ω2(d2)}。 (5)
25、进一步,步骤3具体包括:
26、将考虑出行补贴的网联车路径控制问题表示为双层规划模型,在上层问题中,控制中心充分考虑出行者对路径规划方案的响应行为,在下层问题中,利用混合交通网络均衡模型表征路网中ue和so两类用户路径选择行为,双层规划模型表达式为:
27、
28、
29、
30、
31、式中,表示实施路径控制后从ue用户转变为so用户的出行需求向量,剩余ue用户的出行需求表示为路径控制方案下两类用户的出行需求表示为目标函数中的z1、z2分别表示系统总旅行时间和总补贴金额,表达式分别为:
32、
33、
34、式中,表示实施路径规划方案前最小出行成本,即所有用户均为ue用户时od对w之间的最小出行成本;表示规划方案下od对w之间出行成本增加的路径集合,即式(7)和式(8)分别表示出行需求向量上界和下界的约束,表示网联车市场渗透率。
35、进一步,该网联车路径控制方法还包括:
36、目标函数中的z1、z2在处的值通过下式近似:
37、
38、式中,表示在迭代次数n内目标函数zk关于的梯度,由于在迭代次数n内的路段流量xn为已知,因此zk(xn)为常数,可在目标函数中省略,在式(12)的近似下,在迭代次数n内的目标函数式(6)改写为下式:
39、
40、上式约束条件与双层规划模型中式(6)-式(9)约束条件相同,式(13)为迭代次数n内需要求解的子问题;
41、令表示用户类别m在迭代次数n内的路径选择矩阵,该路径选择矩阵在(r,w)位置的元素值表示od对w之间选择路径r的用户类别m出行者占该od对用户类别m出行需求的比例,满足fm=vmdm;式(12)中的映射γ通过下式近似:
42、
43、进一步,步骤4具体包括以下过程:
44、步骤40,设定收敛阈值为εd,初始化各参数,其中迭代次数n=1,
45、步骤41,根据当前出行需求利用对角化算法求解变分不等式问题式(4),得到路段流量
46、步骤42,确定可能性最高的路径流量形式和相应的路径选择矩阵
47、步骤43,计算路径旅行时间cn,通过对比与的大小关系确定向量更新集合向量和矩阵
48、步骤44,通过式(15)、式(16)计算目标函数梯度:
49、
50、
51、式中,分别表示f、c去掉所有对应路径位置元素后的向量,表示将对应路径位置的元素替换为后的向量,表示去掉所有对应路径位置的行向量后的矩阵,表示δn去掉所有对应路径位置的列向量后的矩阵;
52、步骤45,通过下式计算梯度向量pn:
53、
54、通过下式确定子问题式(13)的最优解
55、
56、式中,i(·)为指示向量,当括号中的第j个条件成立时,ij=1;否则ij=0;计算ue用户出行需求
57、步骤46,根据当前出行需求用对角化算法求解变分不等式问题式(4),得到路段流量及路段总流量确定使z(xθ)取最小值的步长θn∈[0,1],其中令
58、
59、
60、按照下式更新出行需求向量:
61、
62、
63、步骤47,若出行需求转换量足够小,即满足下式(23),则终止算法并返回组合方案下的出行需求否则,令并返回步骤41,
64、
65、式中,||·||1表示向量的l1范数;
66、按照以上步骤求解双层规划模型的式(6)-(9),得到最优路径控制方案即接受各od对需要进行路径控制的车辆数。
67、进一步,利用对角化算法求解变分不等式问题,包括以下步骤:
68、步骤410,设定对角化算法的收敛阈值εx,初始化各参数,其中i=1,根据更新路段旅行时间ti和路段边际旅行时间mti;
69、步骤411,根据路径旅行时间δtti确定每个od对的最短路径,将该od对中所有ue用户分配至该路径上,得到ue用户的全有全无流量形式计算ue用户的路段流量和搜索方向
70、步骤412,根据路径边际旅行时间δtmti确定每个od对边际旅行时间最短的路径,将该od对的所有so用户分配至该路径上,得到so用户的全有全无流量形式计算so用户的路段流量和搜索方向
71、步骤413,计算若其满足停止算法并返回最优解否则,进入步骤414;
72、步骤414,确定最小化最优迭代步长其中令并返回步骤411。
73、有益效果:本发明与现有技术相比,其显著优点是:本发明通过网联车路径控制实现路网通行效率提升,同时通过提供出行补贴提高路径控制方案的可行性,为智能网联环境下的城市路网交通拥堵分析与管理提供参考依据。
- 还没有人留言评论。精彩留言会获得点赞!