基于车路智联的弯道线形引导装置自适应动态调控方法
基于车路智联的弯道线形引导装置自适应动态调控方法,属于交通安全与动态控制。
背景技术:
1、弯道为公路的主要线形之一,由于路况复杂多变,容易让驾驶员产生心理压力和危险驾驶。弯道路段视线诱导装置不能很好的满足对驾驶员的视觉引导需求,导致驾驶员获取的信息不足,是导致弯道路段事故频发的主要因素之一。
2、现有道路弯道处的线形诱导标均为固定角度安装设置,因此车辆在道路不同位置通过线形诱导标获得的视觉刺激存在较大差异,严重影响驾驶员对线形诱导标的识认效率,易引发交通事故。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种能够实现线形引导装置视觉恒常性最大化,提高对弯道路段的轮廓引导和线形引导,增强驾驶员对弯道的感知能力,保障交通驾驶安全的基于车路智联的弯道线形引导装置自适应动态调控方法。
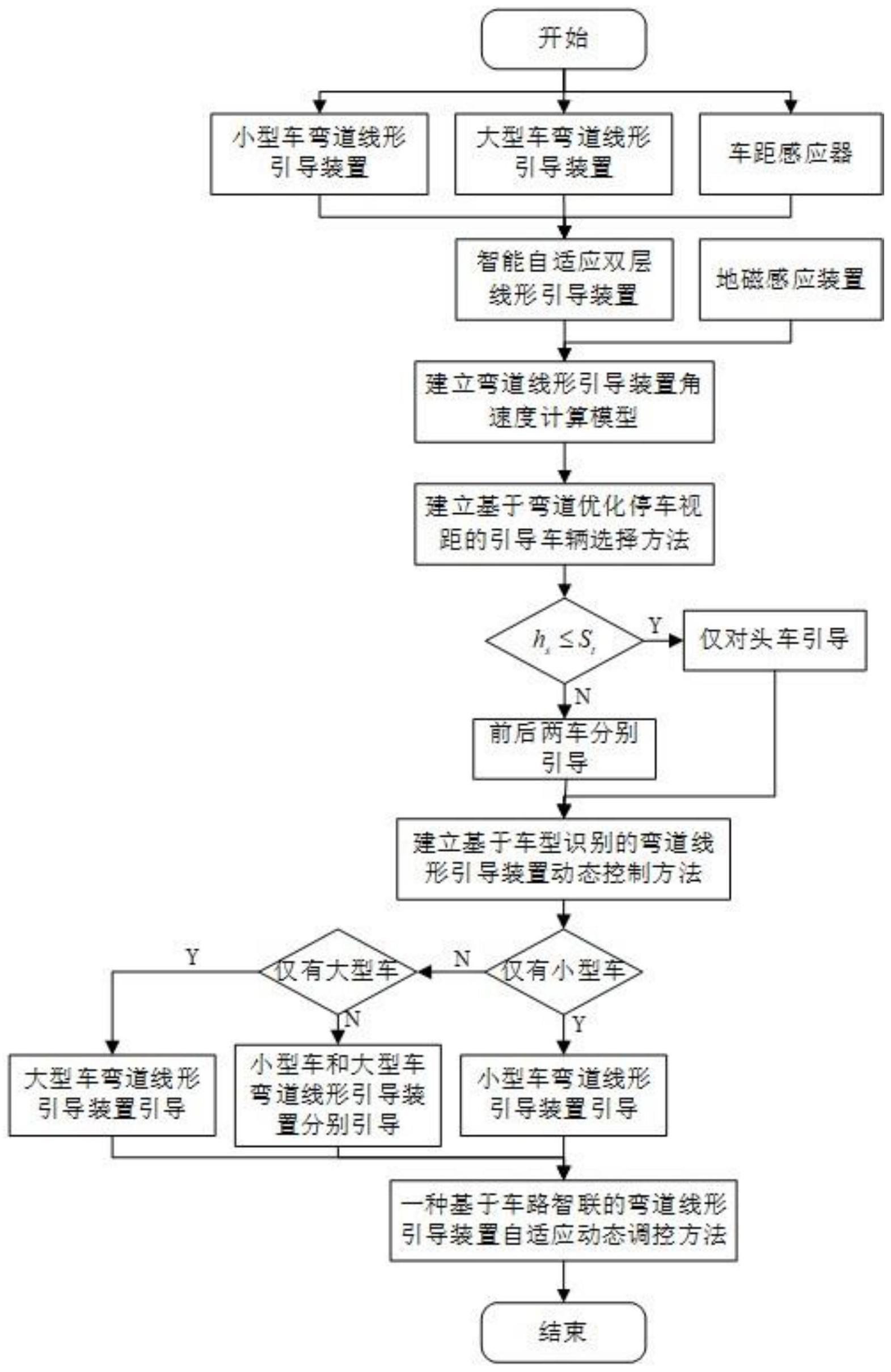
2、本发明解决其技术问题所采用的技术方案是:基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:包括如下步骤:
3、s1构建弯道线形引导装置;
4、弯道线形引导装置包括动力装置以及由上至下依次设置的大型车弯道线形引导装置、小型车弯道线形引导装置、车距感应装置和基座,动力装置与大型车弯道线形引导装置和小型车弯道线形引导装置连接并带动其转动;
5、s2在弯道进口路段的各个车道设置地磁感应装置,地磁感应装置获取驶入弯道内的车辆的车头间距、行驶速度和车型数据;
6、s3建立弯道线形引导装置角速度计算模型,使弯道线形引导装置与车辆驾驶员视线保持垂直;
7、s4建立基于弯道优化停车视距的引导车辆选择模型;
8、s5建立基于车型识别的弯道线形引导装置动态控制模型。
9、优选的,所述的弯道线形引导装置沿弯道间隔设置有若干个,地磁感应装置设置在弯道线形引导装置的来车方向,且地磁感应装置和与其相邻的弯道线形引导装置的间距为100-200m。
10、优选的,所述的大型车弯道线形引导装置和小型车弯道线形引导装置均连接有独立的动力装置,根据进入弯道路段车辆类型的不同,对大型车弯道线形引导装置和小型车弯道线形引导装置分别进行动态控制。
11、优选的,所述方法还包括,弯道线形引导装置围绕基座中心水平旋转的角速度ω为:
12、
13、其中,ω为t时间段内弯道线形引导装置围绕基座中心水平旋转的角速度,θ为t时间段内弯道线形引导装置围绕基座中心水平旋转角度,u1为辆行驶速度,l1为初始时刻t1时车辆距弯道线形引导装置的距离,l2为时刻t2时车辆距弯道线形引导装置的距离,t=t2-t1。
14、优选的,t时间段内弯道线形引导装置围绕基座中心水平旋转角度θ为:
15、
16、优选的,所述的弯道优化停车视距包括驾驶员反应时间内行驶的距离,汽车从开始制动到完全停止所行驶距离、安全距离以及弯道安全冗余距离。
17、优选的,所述的弯道优化停车视距st为:
18、
19、其中,s1为驾驶员反应时间内行驶的距离,s2为汽车从开始制动到完全停止所行驶距离,s3为安全距离,s4为弯道安全冗余距离,t为驾驶员反应时间,为路面与轮胎之间的纵向摩阻系数,rmin为最小弯道半径,r为实际道路弯道半径。
20、优选的,所述方法还包括,前后车辆车头间距小于或等于弯道优化停车视距,则弯道线形引导装置仅对头车驾驶员视线进行智能实时动态转动引导;当前后车辆车头间距大于弯道优化停车视距,则弯道线形引导装置依次对前后车辆驾驶员视线进行智能实时动态转动引导。
21、优选的,所示方法还包括,当地磁感应装置检测到仅有小型车到达,小型车弯道线形引导装置跟随车辆驾驶员视线转动,大型车弯道线形引导装置保持不动;当地磁感应装置检测到仅有大型车到达,大型车弯道线形引导装置跟随车辆驾驶员视线转动,小型车弯道线形引导装置保持不动;当地磁感应装置检测到小型车和大型车连续到达,小型车弯道线形引导装置和大型车弯道线形引导装置分别跟随相应车型车辆驾驶员视线转动。
22、与现有技术相比,本发明所具有的有益效果是:
23、本发明首先构建弯道线形引导装置,可以实现对小型车和大型车在弯道路段的针对性引导,基于弯道线形引导装置上的车距感应装置和布设在弯道路段前的地磁感应装置获取车辆信息后,通过建立的基于车路智联的弯道线形引导装置自适应动态调控方法,可以实现弯道线形引导装置对车辆驾驶员的智能实时动态转动引导,使得车辆驾驶员视线始终垂直正视于所有弯道线形引导装置,进而达到弯道线形引导装置视觉恒常性最大化的目标。
24、本发明根据不同车型驾驶员行车视线高度存在的差异,构建弯道线形引导装置,可以分别实现对小型车和大型车在弯道路段的线形引导,科学提升弯道路段的警示性,能够利用视觉恒常性原理提升驾驶员的视觉舒适性,减少驾驶员在弯道路段的危险驾驶行为。
25、本发明通过弯道线形引导装置调控方法,可以实现弯道线形引导装置对车辆驾驶员视线的智能实时动态转动引导,达到弯道线形引导装置视觉恒常性最大化的目标,并且能够提高对弯道路段的轮廓和线形的引导,增强驾驶员对弯道的感知能力,保障交通驾驶安全。
技术特征:
1.基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所述的弯道线形引导装置沿弯道间隔设置有若干个,地磁感应装置设置在弯道线形引导装置的来车方向,且地磁感应装置和与其相邻的弯道线形引导装置的间距为100-200m。
3.根据权利要求1所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所述的大型车弯道线形引导装置(2)和小型车弯道线形引导装置(3)均连接有独立的动力装置,根据进入弯道路段车辆类型的不同,对大型车弯道线形引导装置(2)和小型车弯道线形引导装置(3)分别进行动态控制。
4.根据权利要求1所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所述方法还包括,弯道线形引导装置围绕基座(5)中心水平旋转的角速度ω为:
5.根据权利要求4所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:t时间段内弯道线形引导装置围绕基座中心水平旋转角度θ为:
6.根据权利要求1所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所述的弯道优化停车视距包括驾驶员反应时间内行驶的距离,汽车从开始制动到完全停止所行驶距离、安全距离以及弯道安全冗余距离。
7.根据权利要求1或6所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所述的弯道优化停车视距st为:
8.根据权利要求1所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所述方法还包括,前后车辆车头间距小于或等于弯道优化停车视距,则弯道线形引导装置仅对头车驾驶员视线进行智能实时动态转动引导;当前后车辆车头间距大于弯道优化停车视距,则弯道线形引导装置依次对前后车辆驾驶员视线进行智能实时动态转动引导。
9.根据权利要求1所述的基于车路智联的弯道线形引导装置自适应动态调控方法,其特征在于:所示方法还包括,当地磁感应装置检测到仅有小型车到达,小型车弯道线形引导装置(3)跟随车辆驾驶员视线转动,大型车弯道线形引导装置(2)保持不动;当地磁感应装置检测到仅有大型车到达,大型车弯道线形引导装置(2)跟随车辆驾驶员视线转动,小型车弯道线形引导装置(3)保持不动;当地磁感应装置检测到小型车和大型车连续到达,小型车弯道线形引导装置(3)和大型车弯道线形引导装置(2)分别跟随相应车型车辆驾驶员视线转动。
技术总结
基于车路智联的弯道线形引导装置自适应动态调控方法,属于交通安全与动态控制技术领域。S1构建弯道线形引导装置;S2在弯道进口路段的各个车道设置地磁感应装置;S3建立弯道线形引导装置角速度计算模型,使弯道线形引导装置与车辆驾驶员视线保持垂直;S4建立基于弯道优化停车视距的引导车辆选择模型;S5建立基于车型识别的弯道线形引导装置动态控制模型。本发明根据不同车型驾驶员行车视线高度存在的差异,构建弯道线形引导装置,可以分别实现对小型车和大型车在弯道路段的线形引导,科学提升弯道路段的警示性,能够利用视觉恒常性原理提升驾驶员的视觉舒适性,减少驾驶员在弯道路段的危险驾驶行为。
技术研发人员:焦方通,刘本兴,孙锋,李平凡,李大龙,崔立龙,孙凡雅,庞庆钰,张虎,赵鹏升,王晓庆
受保护的技术使用者:山东理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!