一种雾天环境下的道路防追尾预警系统及方法
本发明属于交通安全控制,具体涉及一种雾天环境下的道路防追尾预警系统及方法。
背景技术:
1、随着道路交通和汽车工业的飞速发展,我国的机动车保有量以及驾驶人数逐年增加,然而道路追尾事故却屡见不鲜,雨、雾等不利天气的出现极大地降低了道路通行能力,而驾驶员作为交通系统中最活跃又最不可控的因素,在这样复杂的驾驶环境中其行为极易产生较大波动,一旦未能及时采取相应驾驶措施,很有可能造成严重的交通事故。因此,降低不利天气对驾驶员跟车造成的不良影响,提高车辆运行效率成为亟待解决的问题之一。
2、目前,不利天气区一般通过设置路侧静态标志的方法对驾驶员进行提示,同时还会利用闪光标志、可变信息标志等加以辅助。但是,在不同的交通状态下,驾驶员的跟车行为表现并不相同。当交通流量较小时,驾驶员的行为相对自由,如何让驾驶员以当前速度安全行驶是道路交通管理部门首要考虑的问题;而交通流量过大时,驾驶员过早减速乃至停车来寻找合适的跟车距离,会造成道路资源浪费和交通延误,此时如何引导驾驶员在合适的位置减速则是现有技术中亟待解决的首要任务。
技术实现思路
1、为解决上述现有技术的弊端,本发明公开了一种雾天环境下的道路防追尾预警系统,采用了如下技术方案:
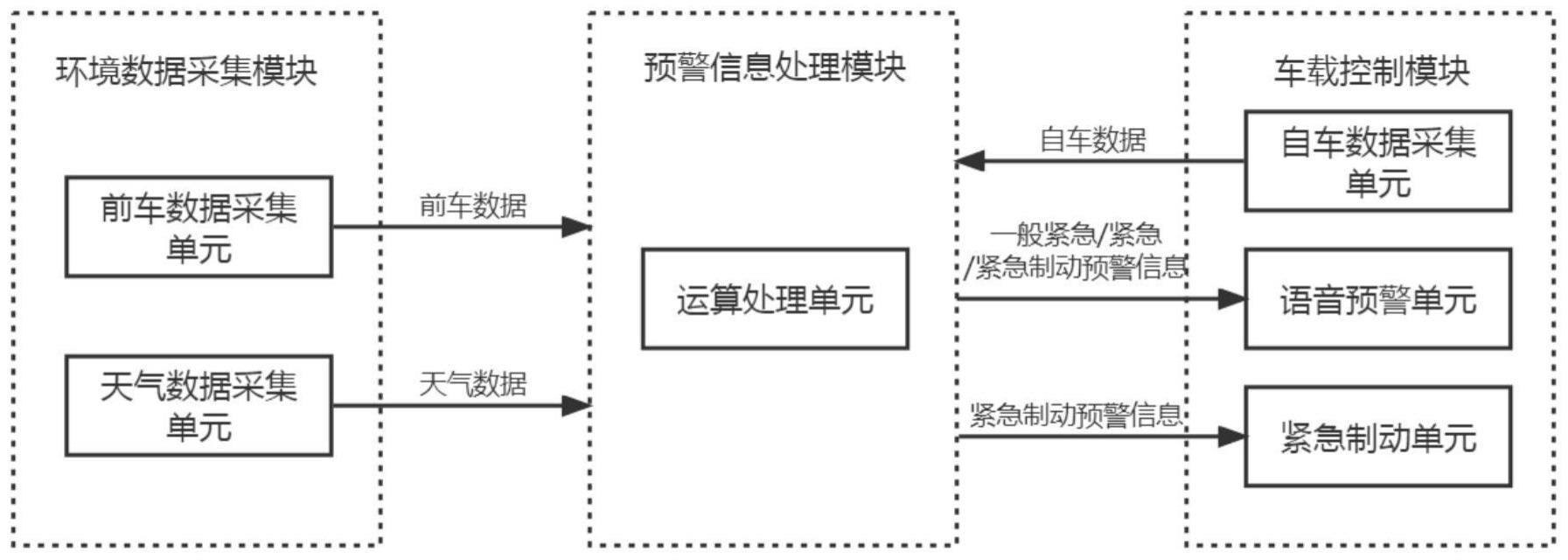
2、一种雾天环境下的道路防追尾预警系统,包括环境数据采集模块、车载控制模块、预警信息处理模块,所述环境数据采集模块用于采集实时的天气数据和前车数据;所述车载控制模块用于采集实时的自车数据;所述预警信息处理模块用于基于实时的天气数据、前车数据、自车数据判断是否需要预警,若是,则发送预警信息,若否,则不发送预警信息;所述车载控制模块还用于接收预警信息处理模块发送的预警信息并进行预警。
3、进一步的,所述环境数据采集模块包括天气数据采集单元和前车数据采集单元,所述天气数据采集单元用于采集实时的天气数据,并将所述天气数据发送至预警信息处理模块,所述天气数据包括能见度、湿度、大气温度、风速、雨量、气压;所述前车数据采集单元用于采集实时的前车数据,并将所述前车数据发送至预警信息处理模块,所述前车数据包括前车车型、前车速度、前车加速度、前车与自车的距离。
4、进一步的,所述车载控制模块包括自车数据采集单元、语音预警单元,所述自车数据采集单元用于采集实时的自车数据,并将所述自车数据发送至预警信息处理模块,所述自车数据包括自车速度、自车加速度;所述语音预警单元用于接收预警信息处理模块发送的预警信息并进行语音预警。
5、进一步的,基于实时的天气数据、前车数据、自车数据判断是否需要预警,具体步骤包括:
6、步骤一、基于天气数据判断是否为雾天环境,若是,则进行步骤二,若否,则不需要预警;步骤二、基于前车数据判断前车是否为减速状态,若是,则进行步骤三,若否,则不需要预警;步骤三、基于实时的前车数据、自车数据计算自车的预警参数;步骤四、基于自车的预警参数、理论紧急状态区间判断自车的状态,若自车的状态为安全状态,则不需要预警,若自车的状态不为安全状态,则基于自车的状态发送预警信息;步骤五、当车载控制模块预警后,基于实时的前车数据、自车数据判断自车是否采取应对措施,若是,则停止发送预警信息,若否,则返回步骤三。
7、进一步的,所述自车的预警参数的计算公式为:
8、
9、式中,τ-1为t时刻前车在自车驾驶人眼中成像角度变化率与成像大小的比值,即自车的预警参数;w为前车的车宽;vl为前车开始减速时的速度;al为前车的加速度;vf为自车在前车开始减速时的速度;δt为前车开始减速到时刻t的时间间隔;d为t时刻前车和自车的车头间距。
10、进一步的,所述理论紧急状态区间为:当τ-1≤i1时为安全区间、当i1<τ-1≤i2时为一般紧急区间、当i2<τ-1≤i3时为紧急区间、当τ-1>i3时为紧急制动区间;其中,i1为“驾驶人预警参数数据库”中“前车开始减速时刻自车的预警参数的95百分位数”;i3为“所述驾驶人预警参数数据库”中“自车开始减速时刻自车的预警参数的95百分位数”;i2为i1和i3的中位值。
11、进一步的,步骤四具体为:基于自车的预警参数、理论紧急状态区间判断自车的状态,若自车的预警参数落在安全区间内,则自车为安全状态,此时不需要预警;若自车的预警参数落在一般紧急区间内,则自车为一般紧急状态,此时发送“一般紧急”预警信息;若自车的预警参数落在紧急区间内,则自车为紧急状态,此时发送“紧急”预警信息;若自车的预警参数落在紧急制动区间内,则自车为紧急制动状态,此时发送“紧急制动”预警信息。
12、进一步的,当语音预警单元接收“一般紧急”预警信息后播报“保持安全距离”的语音预警信息;当语音预警单元接收“紧急”预警信息后播报“追尾风险、减速慢行”的语音预警信息;当语音预警单元接收“紧急制动”预警信息后播报“紧急追尾警报”的语音预警信息,所述车载控制模块还包括紧急制动单元,所述紧急制动单元用于接收“紧急制动”预警信息后控制自车进行紧急制动。
13、进一步的,步骤五中基于实时的前车数据、自车数据判断自车是否采取应对措施具体为:基于实时的前车数据、自车数据计算自车的安全加速度,判断自车的实际加速度绝对值是否大于自车的安全加速度绝对值,若是,则判定自车已采取应对措施,若否,则判定自车未采取应对措施;
14、其中,所述自车的安全加速度计算公式为:
15、
16、式中,amin为自车的安全加速度;l为两车均停下后的最小安全距离,l取值为0~5m。
17、本发明还公开了一种雾天环境下的道路防追尾预警方法,包括如下步骤:
18、s1、获取实时的天气数据、前车数据、自车数据;s2、基于天气数据判断是否为雾天环境,若是,进入步骤s3,若否,不再进行下一步;s3、基于前车数据判断前车是否为减速状态,若是,进入步骤s4,若否,不再进行下一步;s4、基于实时的前车数据、自车数据计算自车的预警参数,基于自车的预警参数、理论紧急状态区间判断自车的状态,若自车状态为安全状态,则不再进行下一步,若自车状态不为安全状态,则根据自车状态进行预警;s5、预警后,基于实时的前车数据、自车数据计算自车的安全加速度,判断自车的实际加速度绝对值是否大于自车的安全加速度绝对值,若是,则停止预警,若否,则进入步骤s4。
19、通过采用上述技术方案,本发明的有益效果为:本发明通过设置环境数据采集模块和车载控制模块,对天气状况、前车和自车的实时状态进行监测和跟踪,并将天气状况、前车和自车的实时状态反馈至预警信息处理模块,当在不利的天气状况下,驾驶人的驾驶行为存在风险时,预警信息处理模块将预警信息发送至车载控制模块进行预警,从而引导驾驶员采取正确的驾驶策略,在合适的时机进行减速,避免追尾风险,同时还可以避免驾驶员过早减速造成的道路资源浪费和交通延误。
技术特征:
1.一种雾天环境下的道路防追尾预警系统,其特征在于:包括环境数据采集模块、车载控制模块、预警信息处理模块,
2.根据权利要求1所述的道路防追尾预警系统,其特征在于:所述环境数据采集模块包括天气数据采集单元和前车数据采集单元,
3.根据权利要求1所述的道路防追尾预警系统,其特征在于:所述车载控制模块包括自车数据采集单元、语音预警单元,
4.根据权利要求1所述的道路防追尾预警系统,其特征在于:基于实时的天气数据、前车数据、自车数据判断是否需要预警,具体步骤包括:
5.根据权利要求4所述的道路防追尾预警系统,其特征在于:所述自车的预警参数的计算公式为:
6.根据权利要求5所述的道路防追尾预警系统,其特征在于:所述理论紧急状态区间为:
7.根据权利要求6所述的道路防追尾预警系统,其特征在于:步骤四具体为:基于自车的预警参数、理论紧急状态区间判断自车的状态,
8.根据权利要求7所述的道路防追尾预警系统,其特征在于:
9.根据权利要求4所述的道路防追尾预警系统,其特征在于:步骤五中基于实时的前车数据、自车数据判断自车是否采取应对措施具体为:
10.一种雾天环境下的道路防追尾预警方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种雾天环境下的道路防追尾预警系统,包括环境数据采集模块、车载控制模块、预警信息处理模块,环境数据采集模块用于采集实时的天气数据和前车数据;车载控制模块用于采集实时的自车数据;预警信息处理模块用于基于实时的天气数据、前车数据、自车数据判断是否需要发送预警信息;车载控制模块还用于接收预警信息处理模块发送的预警信息并进行预警,本发明还公开了一种雾天环境下的道路防追尾预警方法,本发明通过对前车交通状态以及自车当前状态的实时监视和跟踪,引导驾驶员在不同交通状态下执行驾驶策略,有效提高跟车行驶安全性,减少了由于前车制动造成的追尾事故,提高了交通效率和城市道路交通安全。
技术研发人员:薛晴婉,陈昂阔,徐嘉伟,郭伟伟,谭墍元
受保护的技术使用者:北方工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!