一种考虑空域态势和局部优化的航迹补全预测方法及装置
本发明涉及空中交通管理,具体涉及一种考虑空域态势和局部优化的航迹补全预测方法及装置。
背景技术:
1、在空中交通控制系统中,ads-b系统常以一定的频率采集航空器广播的信息,包括位置、航向、呼号等。在这些信息中,若将位置信息依时间维度整合起来就能够得到航空器的飞行轨迹信息,大量的历史飞行轨迹为飞行计划制定、空中交通流控制、空中轨迹预测等空管应用提供了重要的经验信息。但由于存在广播信号干扰、存储介质故障、错误测量等因素的影响,ads-b系统捕获的飞行轨迹信息会出现缺失值或离群值。为了对其进行航迹补齐,现有方法大多采用插值的方法,虽然此类方法简单高效,但实际的飞行轨迹需要考虑碰撞及冲突的避免,而受到局部空域内其他航空器的制约,因此现有方法缺乏对局部空域内其他航空器影响的建模。
技术实现思路
1、本发明根据现有技术存在的问题提供一种考虑空域态势和局部优化的航迹补全预测方法及装置。
2、本发明采用的技术方案是:
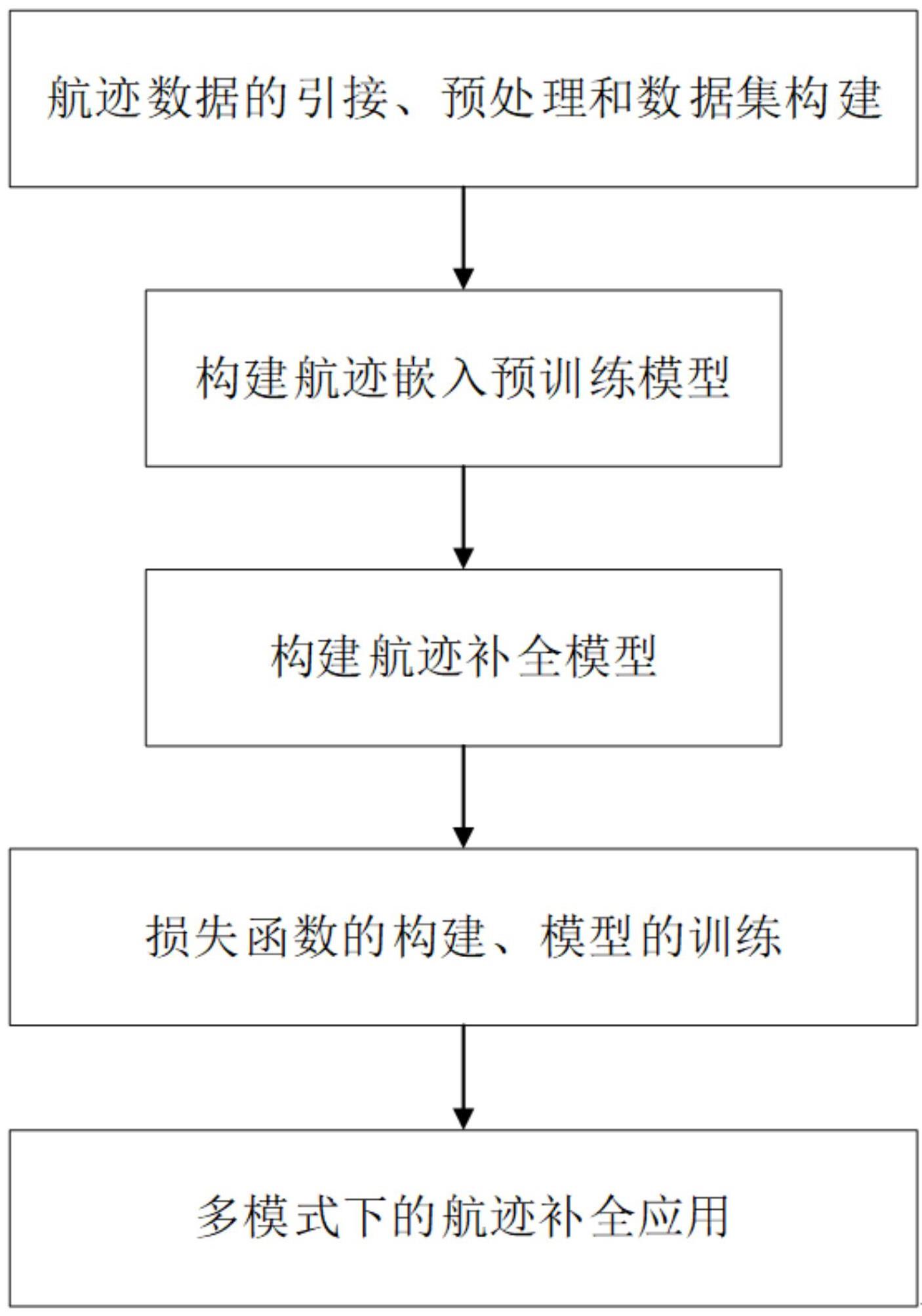
3、一种考虑空域态势和局部优化的航迹补全预测方法,包括以下步骤:
4、步骤1:获取航迹数据,构建数据集;
5、步骤2:构建航迹嵌入预训练模型,用于提取航迹片段中的航迹点属性映射为多维特征向量;对多维特征向量进行时序建模得到包括航迹点特征的航迹嵌入向量;将航迹嵌入向量映射为航迹点属性得到航迹点属性的估计值;
6、步骤3:构建航迹补全与预测模型,用于将空域态势表示嵌入融合,得到局部空域态势信息;根据局部空域态势信息和航迹嵌入向量获取航迹片段,对航迹片段进行时序建模得到预测缺失航迹点特征的隐含向量;将隐含向量进行线性映射得到补全后的航迹点属性;
7、步骤4:构建损失函数,采用数据集对航迹嵌入预训练模型和航迹补全与预测模型进行训练;
8、步骤5:采用训练后的航迹嵌入预训练模型和航迹补全与预测模型进行航迹补全预测。
9、进一步的,所述航迹嵌入预训练模型包括编码器模块和解码器模块;编码器模块包括输入映射层和第一transformer模块;输入映射层为全连接层,用于将航迹片段中的航迹点属性映射为多维特征向量;第一transformer模块包括依次连接的多头自注意力模块、层标准化层、前馈神经网络和层标准层,用于对多维特征向量进行时序建模,输出包括航迹点特征的航迹嵌入向量;解码器模块为输出映射层,用于将航迹嵌入向量映射为航迹点属性,得到航迹点属性的估计值。
10、进一步的,所述航迹补全与预测模型包括区域池化模块、第二transformer模块和输出嵌入层;区域池化模块包括区域池化向量和第一全连接层和第二全连接层;区域池化向量用于存放空域态势表示嵌入;第一全连接层用于将空域态势嵌入进行融合得到局部空域态势信息;第二全连接层用于根据航迹嵌入向量和局部空域态势信息获取航迹片段;第二transformer模块包括依次连接的masked多头自注意力模块、层标准化层、前馈神经网络、层标准层;用于对区域池化模块输出的航迹片段进行时序建模,提取预测缺失航迹点特征的隐含向量;输出嵌入层为全连接层用于将第二transformer模块输出的隐含向量进行线性映射输出补全后的航迹点属性。
11、进一步的,所述步骤3训练过程根据不同场景采用三种训练模式训练航迹补全与预测模型;
12、模式一:采用前序f个航迹点和后序b个航迹点对中间n个航迹点进行航迹补全与预测;
13、若后序b个航迹点缺失,则采用模式二:采用前序f个航迹点对中间n个航迹点进行航迹补全与预测;
14、若前序f个航迹点缺失,则采用模式三:采用后序b个航迹点对中间n个航迹点进行航迹补全与预测。
15、进一步的,所述第一transformer模块对每个多维特征向量进行随机mask操作,过程如下:
16、
17、式中: u(0,1)为采样范围为0到1的均匀分布, u为进行采样后的随机标量, α是随机mask概率; i是输入到所述第一transformer模块的高维特征向量; imasked是经过随机mask操作后的高维特征向量;sgn(·)为符号函数;
18、第二transformer模块中masked多头自注意力模块的mask矩阵三种不同的模式分别满足下述公式:
19、模式一:
20、
21、模式二:
22、
23、模式三:
24、
25、式中: mask为masked多头自注意力模块的mask矩阵, triu(·)算子为取矩阵的上三角区域, diag(·)算子为取矩阵的对角线区域, i为航迹点序号,inf为无穷大数, f为前序航点数, n为中间航点数, b为后续航点数。
26、进一步的,所述区域池化模块处理过程满足下式:
27、
28、式中: pa为航迹点 a的区域池化张量,为包括在航迹点 a局部空域的第 i个扇区块,第 j个簇,第 k个区域内其他航空器的航迹点集合, hr是航迹点 r的航迹嵌入向量, sa为第一全连接层的输出, w1和 b1分别为第一全连接层的权重矩阵和偏置向量, ca和 ia分别为第二个全连接层的输入和输出, w2和 b2分别为第二全连接层的权重矩阵和偏置向量, flatten(·)算子为将张量沿各维度平铺为一个向量; concat(·)算子为将两个向量进行首尾相连, t为向量的转置。
29、进一步的,所述航迹数据经过预处理,然后构建数据集,预处理过程如下:
30、根据航迹数据的采样间隔,将航迹数据中存在缺失值的片段剔除;
31、对航迹点属性进行最小最大值归一化;航迹数据为包括每条航线中各个时刻的航迹点属性和飞行器的运动趋势;
32、航迹点属性包括时间戳、经度、纬度、海拔、经度方向速度、纬度方向速度和垂直速度;采取最小最大值归一化的航迹点属性不包括时间戳;
33、飞行器的运动趋势包括爬升、保持、转弯、下降。
34、进一步的,所述损失函数如下:
35、
36、式中: pi为第 i个航迹点的属性损失, ai,j为第 i个航迹点的第 j个属性的真实值,为第 i个航迹点的第 j个属性的预测值, nt为航迹嵌入预训练模型或航迹补全与预测模型输出的航迹点个数, na为每个航迹点的属性个数, l为损失函数。
37、进一步的,所述局部空域指的是半径为 r,垂直高度偏差为 h的圆柱体空间;
38、区域池化方法如下:
39、将局部空域依圆心等角度切分为 d1个扇区块,每个扇区块依半径等分为 d2个簇,每个簇依高度等分为 d3个区域,将处于同一区域内航空器的航迹嵌入向量进行相加得到当前时刻的空域态势表示嵌入,再使用线性映射对所有区域的空域态势表示嵌入进行融合,得到区域池化结果。
40、一种考虑空域态势和局部优化的航迹补全预测的装置,包括至少一个处理器、至少一个存储器、输入输出设备和电源;存储器用于存储考虑空域态势和局部优化的航迹补全预测方法的指令;处理器用于执行考虑空域态势和局部优化的航迹补全预测方法;输入输出设备用于进行数据交互;电源用于为设备提供电源。
41、本发明的有益效果是:
42、(1)本发明对缺失航迹点进行估计时,不仅考虑缺失航迹点前后的轨迹信息,同时考察局部空域内其它航空器对缺失航迹点的影响,并使用区域池化方法将局部空域内其它航空器的飞行态势信息进行融合、降维,更加符合实际情况;
43、(2)本发明对具有复杂飞行模式的航迹片段进行补全,具有较高的补全精度。
- 还没有人留言评论。精彩留言会获得点赞!