一种基于反馈控制的智慧高速公路协同管控方法与流程
本发明属于公路交通管理控制,特别是一种基于反馈控制的智慧高速公路协同管控方法。
背景技术:
1、智慧高速公路管控作为提升公路管理服务效能的重要手段,近年来在智慧高速中得到了广泛的研究和应用,如宁沪高速无锡段、沪杭甬高速等均采用了可变限速、匝道控制等管控手段。然而现阶段的管控手段主要以缓解交通拥堵为主要目标,未将交通运行安全列为重点问题,所以目前还缺乏相关的技术研究。
技术实现思路
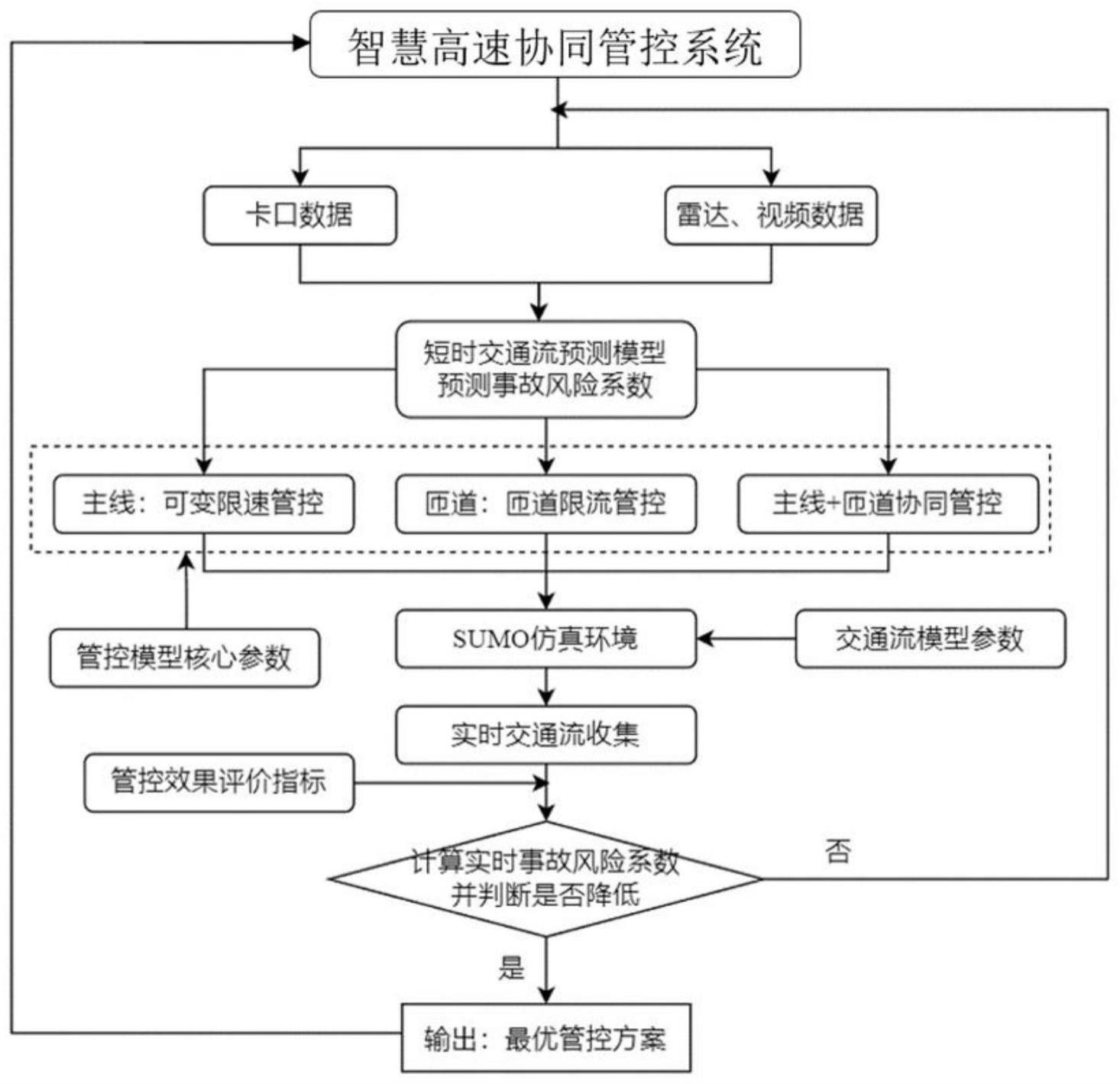
1、本发明的目的在于提供一种基于反馈控制的智慧高速公路协同管控方法,基于智慧高速协同管控系统的卡口数据和雷视融合数据,实现高速公路全域未来交通态势的高精度预测,完成控制周期内可变限速和匝道管控措施的智能化推送,从而达到平抑交通流、减少交通事件、避免交通事故的目的。
2、实现本发明目的的技术解决方案为:一种基于反馈控制的智慧高速公路协同管控方法,所述方法包括以下步骤:
3、步骤1,构建智慧高速公路协同管控系统,并根据整条高速公路上智慧高速公路协同管控系统中控制设备所处的位置,将整条高速公路划分为不同的控制路段;
4、步骤2,控制设备实时采集高速公路各控制断面处的交通流状态信息,并根据各控制断面的交通流状态信息,实现各控制路段交通流运行状态的还原与预测;
5、步骤3,以提高交通运行的安全性为主要目标、道路通行能力为次要目标,建立可变限速与匝道管控协同管控模型,获取各控制路段的最优管控策略并通过控制设备发布。
6、进一步地,步骤1中所述智慧高速公路协同管控系统的控制设备包括:
7、交通流信息感知模块,包括卡口设备、雷达设备,用于采集和统计各控制断面的车辆行驶速度、交通流量和车型信息;
8、在线实时仿真控制系统,用于实时还原控制路段的交通运行状态、进行短时交通流预测和管控效果推演验证;
9、管控策略发布模块,用于实现入口匝道信号灯控制进入高速公路主线的车辆、主线段沿线布设的可变信息标志向车辆发布最优的建议行驶速度。
10、进一步地,步骤2所述控制设备实时采集高速公路各控制断面处的交通流状态信息,并根据各断面的交通流状态信息,实现各控制路段交通流运行状态的还原与预测,具体过程包括:
11、步骤2.1,数据收集与预处理;所述数据收集包括:卡口设备、雷达设备采集和统计各控制断面的车辆行驶速度、交通流量和车型信息;预处理包括:对卡口数据进行智能补全和异常删除;
12、步骤2.2,控制路段的交通运行状态实时还原和预测;在线实时仿真控制系统中,基于深度学习的短时交通量预测方法,利用预处理后的卡口数据的时间特征与外部特征构建特征工程,考虑实时性与高速空间的拓扑关系,将交通流预测模型简化舍弃空间特征,通过长短期记忆网络lstm、多层感知机mlp以及两种融合机制的运算,并以设定的预测周期,实现未来短时交通流量的预测,具体过程如下:
13、将时间特征分为临近特征、周期特征与趋势特征;
14、外部特征包括待预测时间片对应的时间片序号、星期信息,并以独热编码的形式引入是否为周末、是否为假期这些特征;
15、特征融合的机制包括:
16、融合1:采用下式的基于哈德马积⊙的加权融合机制:
17、mfision=wc⊙mc+wp⊙mp+wt⊙mt(1)
18、其中:wc,wp,wt分别表示待学习的时间特征中的临近、周期和趋势特征权重,mc,mp,mt分别表示每种特征经过lstm计算后的张量输出;
19、融合2:采用简单横向拼接的方式将外部特征与mlp的输出融合。
20、进一步地,步骤2.1中预处理具体为:利用融合两种感知数据信息的智能算法,结合雷达数据对卡口数据进行智能补全和异常删除。
21、进一步地,步骤3所述以提高交通运行的安全性为主要目标、道路通行能力为次要目标,建立可变限速与匝道管控协同管控模型,获取各控制路段的最优管控策略并通过控制设备发布,具体包括:
22、步骤3.1,可变限速控制策略,根据步骤2得到的各控制路段交通流运行状态的还原与预测结果,以提高控制路段交通运行的安全作为可变限速控制策略的优化目标,建立反馈控制模型并计算最优限速值;
23、步骤3.2,匝道控制策略,通过调节入口匝道信号灯,控制从匝道驶入主线段的交通量,使得入口匝道下游主线交通处于一个稳定状态;
24、步骤3.3,协同控制策略,通过可变限速控制策略和匝道控制策略协同控制,平衡入口匝道上下游的交通需求,使高速公路整体维持在稳定状态;
25、步骤3.4,最优管控策略发布,通过改变路侧的可变信息标牌上的限速值,向车辆发布可变限速控制策略得到的最优速度,实现可变限速管控;通过调节入口匝道信号灯红绿灯的占比,控制进入主线段段的交通量,实现匝道管控。
26、进一步地,步骤3.1中的基于反馈控制模型的可变限速控制策略,核心控制参数包括以下内容:
27、1)阈值,即控制开启的时间;当控制路段内的交通运行过程中事故风险系数超过预设阈值时,开启可变限速控制并使用反馈控制模型计算的最优限速值;其中,事故风险系数cri定义为:
28、
29、其中,r是变量的个数,r表示变量的序号,ωr是参数xr的回归权重系数,xr是第r个风险影响变量,考虑研究路段内各控制点之间的速度差异和流量差异值与事故风险系数之间的关系,xr具体选择影响因素及其定义如表1所示:
30、表1影响变量
31、
32、其中,m表示研究路段内控制点的数量;m表示控制点的序号;speedm,car、speedm,truck分别代表一个控制周期内通过第m个控制点上小客车和大货车的平均速度;speedaver,car、speedaver,truck分别代表一个控制周期内在m个控制点上所有小客车和大货车的平均速度;volm,car、volm,truck分别代表一个控制周期内通过第m个控制点上小客车和大货车的平均交通流量;volaver,car、volaver,truck分别代表一个控制周期内在所有m个控制点上所有小客车和大货车的平均交通流量;
33、2)控制周期,即多久调整一次控制策略;所述控制周期与步骤2.2所述预测周期相同;
34、3)限速调整值;时间上,调整值大小设为5km/h;空间上,调整值大小不大于10km/h;
35、4)最优限速值;计算cri(k+1)并最小化整条道路的事故风险系数,得到k+1控制周期内第i段控制路段的最优限速值vsli(k+1):
36、
37、其中,crii(k+1)表示第i段控制路段在k+1控制周期内的事故风险系数;
38、求解最优限速值时,增加以下两个约束条件:
39、
40、其中,ds表示相邻两个控制路段之间的限速值改变上限,dk表示相邻两个控制周期间的限速值改变上限;vvsl,i(k)和vvsl,i+1(k)分别表示在控制时段k内,控制路段i及下游控制路段i+1的最优限速值;vvsl,i(k)和vvsl,i(k+1)分别表示在控制控制段i上,控制时段k及下一个控制时段k+1的最优限速值。
41、进一步地,步骤3.2所述匝道控制策略,核心控制参数包括以下内容:
42、在经典的闭环反馈alinea控制策略的基础上,考虑上游道路对入口匝道的安全性能影响,加入事故风险调整项:
43、
44、其中,r(k)是第k个控制周期计算的匝道通过率;r(k-1)是第(k-1)个控制周期内匝道通过率;kr是具有校准性质的参数;是主线下游的期望占有率,的值设置为最佳占有率或小于最佳占有率;oout(k-1)是(k-1)个控制周期内下游实际测得的占有率;ks是事故风险修正参数;crik是入口匝道上游道路在第k个控制周期内的事故风险系数;cricrit是事故风险系数阈值。
45、进一步地,步骤3.3中所述协同控制策略,核心控制参数包括以下内容:
46、可变限速控制策略和匝道控制策略协同使用时,在r(k)中加入相应的调整项得到r*(k):
47、
48、其中,qcap是考虑限速后的入口匝道下游道路通行能力;qi(k)是限速后的道路下游路段i在k控制周期内的到达交通量;
49、实际应用时,通过设置入口匝道信号灯控制匝道的通过率,通过率r(k)对应信号控制周期内绿灯时长g(t),单位为秒:
50、
51、gmin<g(t)<gmax(8)
52、其中,c为固定的控制周期;rsat为一个控制周期内匝道的最大通过率;gmin为最短绿灯时间;gmax为最长绿灯时间;
53、在计算信号灯配置时,对绿灯时长g(t)进行如下调整:
54、
55、其中,q为入口匝道上的排队车辆数,h(t)为调整后的绿灯时长。
56、本发明与现有技术相比,其显著优点为:
57、1)本发明结合实时卡口数据(包括车辆脱敏牌照,车辆速度,车辆类型和车辆所在车道等)与重点路段的雷达数据进行融合(车辆id,车辆换道行为,车辆加速度、车辆速度等),在智慧高速公路协同管控系统实现道路交通流的还原,利用改进的st-lstm(时空长短期记忆神经网络)模型,实现高速公路全域未来交通态势的高精度预测,并以此来对高速公路进行动态管理交通管理,保障整条高速公路的安全运行。
58、2)本发明选择可变限速与匝道管控两种策略,在实时仿真与态势预测的基础上实现管控措施智能化推送,提升安全性的内在机理,从而达到平抑交通流、减少交通事件、避免交通事故的目的。
59、下面结合附图对本发明作进一步详细描述。
- 还没有人留言评论。精彩留言会获得点赞!