一种基于北斗的交通异常现场预先避开装置的制作方法
本发明涉及交通避险领域,尤其涉及一种基于北斗的交通异常现场预先避开装置。
背景技术:
1、现在社会车辆越来越多,但是随着车辆的增多,交通拥堵的情况也越来越严重。而且有时候因为天灾或者事故,也很容易造成交通拥堵。对于交通拥堵,目前对于交通拥堵,通常是交警现场指挥,对于目标车辆,通常是提前在地图上标明拥堵的位置或者提供其他的绕行路线。但对于已经处于拥堵区域或没有绕行路线的目标车辆,现有技术无法提供较快的通过路线。
2、因此,有必要对现有技术改进以解决上述技术问题。
技术实现思路
1、有鉴于此,本发明的目的之一在于提供一种基于北斗的交通异常现场预先避开装置,解决现有技术中交通异常后车辆无法迅速避开或驶离异常区域的技术问题。具体而言通过以下技术方案实现:
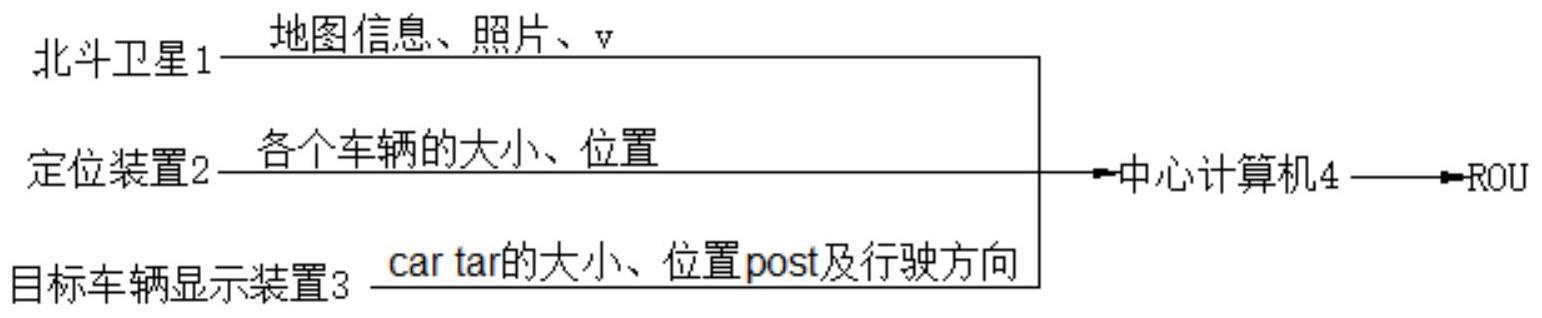
2、本发明实施例的第一方面,提供了一种基于北斗的交通异常现场预先避开装置,包括北斗卫星、定位装置、目标车辆显示装置、中心计算机、显示装置和电力供给装置;
3、所述北斗卫星用于对道路进行监控,生成地图信息,如发现道路状况异常,则拍摄异常处照片,并确定照片范围内车辆的平均速度v,照片的范围根据实际需要,可设置为1公里的道路、5公里的道路、10公里的道路等;所述定位装置用于确定照片中各个车辆的大小、位置;所述目标车辆显示装置用于显示目标车辆car tar的大小、位置post及行驶方向,根据行驶方向确定前方、后方;所述北斗卫星、定位装置、目标车辆显示装置生成的信息每隔sec秒刷新一次;所述中心计算机用于进行以下运算:
4、s1.获取定位装置中各个车辆的大小、位置信息,获取目标车辆car tar的大小、位置信息;
5、s2.确定车速低于(v×a%)的车辆为拥堵车辆,100≥a≥0,定位装置确定拥堵车辆的大小、位置;
6、s3.通过ai生成目标车辆car tar的驶离路线rou,具体生成步骤为
7、s31.ai不间断依次随机生成路线route1、route2、route3……,route1、route2、route3……均满足的条件为:a.目标车辆car tar与各个车辆的距离disa≥cona,cona为一常数;b.目标车辆car tar能够从当前位置post行使至行驶方向上最后一个拥堵车辆前方的位置;
8、s32.依次确定route1、route2、route3……中的最短路径route sh,输出routesh,route sh=rou,车辆的拥堵区域不一定完全堵塞道路,如果完全堵塞道路,则生成一条从别的道路绕过拥堵区域的路径,如果未完全堵塞道路,则提前生成一条从其他车道驶离拥堵区域的路径,防止目标车辆在不知拥堵区域的情况下行使入拥堵区域的车道。
9、进一步,所述中心计算机还用于完成以下步骤:
10、s4.当对car tar进行步骤s1-s3步骤后无法生成rou时,确定照片范围内安装本装置的车辆car 1,car 2……car m,分别对car 1,car 2……car m进行在s3中与car tar相同的步骤,确定car 1,car 2……car m中能够生成生成最短路径的车辆car`1、car`2……car`n,
11、s5.确定car`1、car`2……car`n的最短路径route sh`1、route sh`2……routesh`n,确定route sh`1、route sh`2……route sh`n中的路径最短的值route sh`min和对应的车辆car`min,向car`min发送route sh`min的信息;
12、s6.经过时间t后,重复s1-s4步骤,直至car tar行使至行驶方向上最后一个拥堵车辆前方的位置。
13、进一步,所述步骤s32的具体步骤为:
14、s321.生成route1,确定route1的长度l1,输出route1=route sh;
15、s322.依次生成route2过程中,如果已生成的路径长度≥l1,则停止生成路径route2,则仍输出s321中输出的route sh,如果生成完整的route2的长度l2<l,则输出route2=route sh,同时删除s321中的routesh;
16、……
17、s32k.依次生成routek过程中,如果已生成的路径长度≥l(k-1),则停止生成路径routek,仍输出s32(k-1)中输出的route sh,如果生成完整的routek的长度lk<l(k-1),则输出routek=route sh,同时删除s32(k-1)中的routesh,k∈{1,2……},每隔一定的时间,生成一条新的路径,对新的路径重复比对已生成路径中长度最短的路径,如果生成新路径过程中新路径已经大于或等于上述最短路径,则停止生成新路径,如果生成的新路径的总长度小于上述最短路径,则输出新路径为route sh,这样ai生成路径的过程可以更快。
18、进一步,所述的基于北斗的交通异常现场预先避开装置,生成路径route1过程中,还满足条件:c.当car tar有多个方向可以行使时,优先行驶的方向为前方。
19、进一步,所述北斗卫星发现道路状况异常的方式为:
20、a1.对道路前后x公里内的车辆进行监控,生成x公里范围内车辆的平均车速v;
21、a2.确定道路前后x公里内车速低于(v×a%)的车辆位置,如果y辆及y辆以上的相邻车辆之间的距离小于mil,则确定y辆车所在的位置为交通异常区域。
22、进一步,所述x设置为10,所述y设置为5,所述mil设置为3米。
23、进一步,所述a设置为10,所述sec设置为1,所述cona设置为10cm。
24、进一步,在步骤s31中,ai生成随机路线的时间间隔为0.1秒。
25、进一步,步骤s6中时间t设置为10秒。
26、本发明的积极有益的技术效果包括:当车辆不在拥堵区域时,可以自动生成路线,通过绕行其他道路或从其他车道从交通异常区域通过;通过向其他安装本装置的车辆发送建议路线,及时目标车辆处于交通区域中,本装置也可以快速疏通道路,缓解交通拥挤;通过制定生成规则,利用ai生成道路,可以快速生成合适的道路,指导目标车辆快速驶离交通异常区域;利用北斗卫星拍摄照片,并通过测量平均车速及拥堵车辆的车速,快速确定交通异常区域;本发明的其他有益效果将结合下文具体实施例进行进一步的说明。
技术特征:
1.一种基于北斗的交通异常现场预先避开装置,其特征在于:包括北斗卫星、定位装置、目标车辆显示装置、中心计算机、显示装置和电力供给装置;
2.如权利要求1所述的基于北斗的交通异常现场预先避开装置,其特征在于:所述中心计算机还用于完成以下步骤:
3.如权利要求2所述的基于北斗的交通异常现场预先避开装置,其特征在于:所述步骤s32的具体步骤为:
4.如权利要求3所述的基于北斗的交通异常现场预先避开装置,其特征在于:生成路径route1过程中,还满足条件:c.当car tar有多个方向可以行使时,优先行驶的方向为前方。
5.如权利要求4所述的基于北斗的交通异常现场预先避开装置,其特征在于:所述北斗卫星发现道路状况异常的方式为:
6.如权利要求5所述的基于北斗的交通异常现场预先避开装置,其特征在于:所述x设置为10,所述y设置为5,所述mil设置为3米。
7.如权利要求6所述的基于北斗的交通异常现场预先避开装置,其特征在于:所述a设置为10,所述sec设置为1,所述cona设置为10cm。
8.如权利要求7所述的基于北斗的交通异常现场预先避开装置,其特征在于:在步骤s31中,ai生成随机路线的时间间隔为0.1秒。
9.如权利要求8所述的基于北斗的交通异常现场预先避开装置,其特征在于:步骤s6中时间t设置为10秒。
技术总结
本发明公开了一种基于北斗的交通异常现场预先避开装置,包括北斗卫星、定位装置、目标车辆显示装置、中心计算机、显示装置和电力供给装置;所述北斗卫星用于对道路进行监控,生成地图信息,所述定位装置用于确定照片中各个车辆的大小、位置;所述目标车辆显示装置用于显示目标车辆car tar的大小、位置post及行驶方向;所述中心计算机进行以下运算输出route sh=ROU;解决现有技术中现有技术中交通异常后车辆无法迅速避开或驶离异常区域的技术问题。
技术研发人员:李立平,许超,宋文杰,黄金鑫,刘琨,喻言佳,何阳寅,章恒
受保护的技术使用者:武汉汇科质量检测有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!