适用于智能交通运行车路协同的交通流分配方法及系统与流程
本发明涉及智能交通领域,更具体地说,涉及一种适用于智能交通运行车路协同的交通流分配方法及系统。
背景技术:
1、在现代交通系统中,导航服务起着至关重要的作用。通过提供最优的行驶路径,导航服务可以帮助驾驶者有效地规划他们的行程,避开交通拥堵,节省时间和燃料。然而,现有的导航服务通常存在一些问题,特别是在高密度的城市路网中。
2、首先,现有的导航系统主要关注单个驾驶者的行驶需求,往往忽视了其他驾驶者的需求。虽然导航系统会考虑道路的实时交通状况,例如车流量、交通速度等,但它们通常并未充分考虑所有驾驶者的目的地需求。换句话说,当多个驾驶者的目的地都在同一区域时,现有的导航系统可能会为他们提供相同或相近的行驶路径,这可能导致某些道路过于拥挤,造成交通拥堵。
3、其次,现有的导航系统在为驾驶者提供行驶路径时,主要考虑的是最短的行驶距离或最快的行驶时间。然而,这并不总是最佳的选择。例如,如果一条道路已经非常拥挤,即使它是最短的路径,驾驶者也可能需要花费很长时间才能通过。同样,如果一条道路的通行能力较差,例如道路有事故、狭窄或有坑洼,即使它是最快的路径,驾驶者也可能会感到不舒服。
4、因此,现有的导航服务在处理大规模、复杂的城市交通问题时,常常显得力不从心。为了提高道路的使用效率,减少交通拥堵,提升驾驶者的行驶体验,需要一种新的导航技术方案,这个方案能够综合考虑所有驾驶者的需求,以及道路的实时状况和通行能力,以提供更优的行驶路径。
技术实现思路
1、本发明要解决的技术问题是提供一种适用于智能交通运行车路协同的交通流分配方法及系统,以解决背景技术中提到的问题。
2、为了达到上述目的,本发明采取以下技术方案:
3、一种适用于智能交通运行车路协同的交通流分配方法,包括如下步骤:
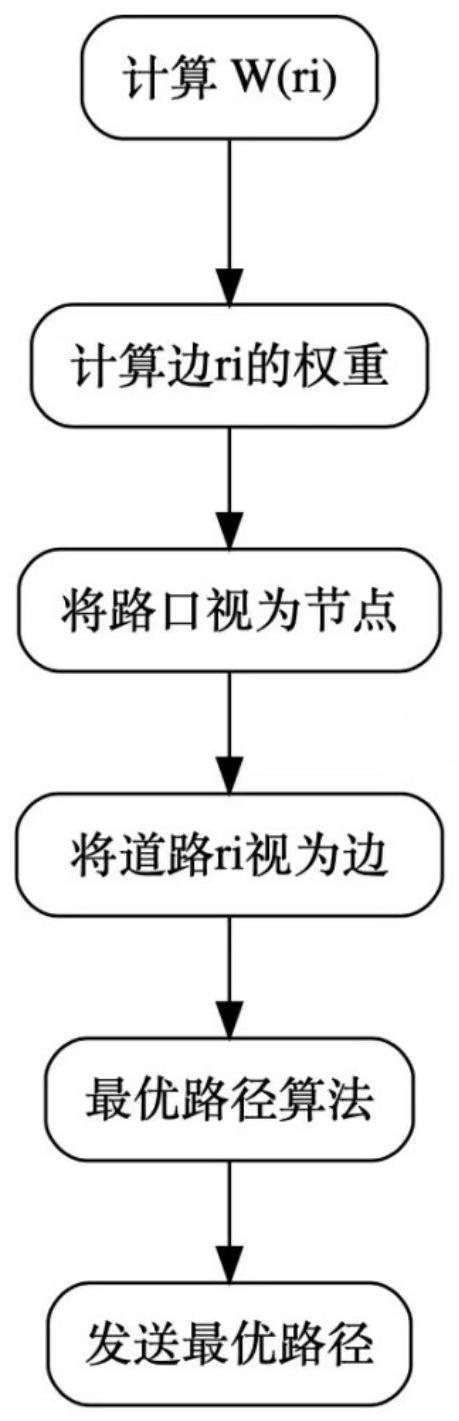
4、s1:计算对于任一驾驶者a而言的道路ri的权重:
5、w(ri)=α/(t(ri)+1)+β×c(ri)+γ×d(ri)+σ/(e(ri)+1)
6、其中:
7、ri表示第i条道路;
8、t(ri)为道路ri上的实际车辆数量占道路ri上可放置车辆的比例;
9、c(ri)表示道路ri自身的可通行能力,可通行能力越好c(ri)越大;
10、d(ri)表示道路ri对于驾驶者a的需求程度,需求程度越高d(ri)越大;
11、e(ri)为道路ri对于所有驾驶者的需求程度d(ri)的叠加;
12、α、β、γ、σ分别为大于0的常数;
13、其中,任一驾驶者对应的d(ri)的计算过程如下:
14、s1.1:通过车辆物联网系统,收集该驾驶者的当前位置和目的地信息;
15、s1.2:通过导航算法生成多条从当前位置到目的地可能的导航路线;
16、s1.3:对于每个生成的导航路线,通过判断是否经过道路ri,并采用如下公式计算d(ri):
17、
18、其中,m是生成的导航路线数量,matchj(ri)表示指示函数,若第j条导航路线经过道路ri,取matchj(ri)=1,若第j条导航路线不经过道路ri,取matchj(ri)=0;sj表示第j条导航路线的长度;
19、其中,α、β、γ、σ针对道路ri和驾驶者a特别计算,具体为:收集历史数据h={(t1,c1,d1,e1),(t2,c2,d2,e2),……(tk,ck,dk,ek)……,(tn,cn,dn,en)},其中(tk,ck,dk,ek)表示道路ri以及驾驶者a所对应的多组(t(ri),c(ri),d(ri),e(ri))数据中的第k组数据,对每组数据分别计算((tk+1),1/ck,1/dk,(ek+1))并令其等于(αk,βk,γk,σk),计算αk从1~n的均值将其作为α,计算βk从1~n的均值将其作为β,计算γk从1~n的均值将其作为γ,计算σk从1~n的均值将其作为σ;
20、s2:将每条道路ri看作一个边,每个路口看作一个节点,构建导航路线图,边ri的权重为s1步骤所计算出的对应于驾驶者a的w(ri);然后,采用以下算法寻找驾驶者从起点到终点的最优路径,并将其发送至驾驶者a:
21、s2.1:为每个节点标记一个最短距离值,将起点的最短距离值设为0,其余所有节点的最短距离值设为无穷大;
22、s2.2:标记所有节点、所有边为未处理状态;
23、s2.3:从未处理节点中按照最短距离值选择一个节点n;
24、s2.4:对于节点n的每一条未处理过的相邻边h,计算w(h)+r(n),如果w(h)+r(n)<r(m),则更新m的最短距离为w(h)+r(n),并标记边h、节点n均为已处理过;其中w(h)是h的权重,r(n)是n的最短距离,m是h相对于n的另一端点;若对于节点n不存在未处理过的相邻边,则直接标记n为已处理;
25、s2.5:重复步骤s2.3和s2.4,直到终点被标记为已处理;
26、s2.6:从起点开始,按时间顺序找出依次被标记为已处理的点并连接,作为从起点到终点的最短路径作为最优路径。
27、优选的,t(ri)的计算过程包括如下步骤:
28、a.沿道路ri设置多个摄像头设备,对道路ri进行实时监控;
29、b.通过图像识别技术,识别每个摄像头设备监控画面中的车辆数量;
30、c.将每个摄像头设备监控到的车辆数量相加,得到道路ri上的实际车辆数量;
31、d计算道路ri可放置车辆的数量,包括测量道路ri的宽度和长度,然后以标准车辆尺寸估算最大可放置车辆数量;
32、e.将步骤c得到的实际车辆数量除以步骤d得到的可放置车辆的数量,得到t(ri)。
33、优选的,c(ri)通过以下步骤获取:
34、沿道路ri设置多个摄像头设备,对道路ri进行实时监控;
35、通过图像识别技术,识别每个摄像头设备监控画面中的道路障碍,至少包括施工、事故、塌方引起的道路障碍;
36、计算每个障碍物所占用的车道的横向长度,若多个障碍物的横向长度相连,则将这多个障碍物看做同一个障碍物并计算其总的横向长度;最终得到n个障碍物的横向长度l1~ln;
37、量取道路ri的总横向长度lt;
38、依据如下公式计算c(ri):
39、
40、其中,n为障碍物数量,lj为j个障碍物的横向长度。
41、本发明还公开一种适用于智能交通运行车路协同的交通流分配系统,包括:
42、(1)车辆数量检测模块,用于通过安装在道路上的传感器设备,检测和计算每条道路ri的实际车辆数量,计算ri上的实际车辆数量占道路可放置车辆的比例t(ri);
43、(2)道路状态监测模块,通过沿道路ri布置的多个摄像头设备,对道路ri进行实时监控,通过图像识别技术,识别每个摄像头设备监控画面中的道路障碍,包括施工、事故、塌方,并根据识别结果采用上述适用于智能交通运行车路协同的交通流分配方法计算c(ri);
44、(3)需求计算模块,用于通过车辆物联网系统,收集驾驶者的当前位置和目的地信息,通过导航算法生成多条从当前位置到目的地可能的导航路线,并判断每条路线是否经过道路ri,以根据上述适用于智能交通运行车路协同的交通流分配方法计算d(ri)、e(ri);
45、(4)权重计算模块,用于根据计算出的t(ri),c(ri)和d(ri),按照公式w(ri)=α/(t(ri)+1)+β×c(ri)+γ×d(ri)+σ/(e(ri)+1)计算出每条道路ri的权重,其中α、β、γ、σ为根据上述适用于智能交通运行车路协同的交通流分配方法计算得出的大于0的常数;
46、(5)路径规划模块,用于将每条道路ri看作一个边,每个路口看作一个节点,构建导航路线图,边ri的权重为权重计算模块所计算出的w(ri),然后根据上述s2所述方法寻找驾驶者从起点到终点的最优路径,并将其发送至驾驶者;
47、所述车辆数量检测模块、道路状态监测模块、需求计算模块、权重计算模块、路径规划模块相互连接通讯。
48、优选的,所述车辆数量检测模块包括摄像头设备和图像处理算法中心,所述摄像头设备用于拍摄道路的实时图像,所述图像处理算法中心用于识别和计算车辆数量。
49、优选的,所述道路状态监测模块包括摄像头设备和深度学习处理单元,所述摄像头设备用于拍摄道路的实时图像,所述深度学习处理单元用于实现图像识别功能、识别道路障碍并计算道路的可通行能力。
50、优选的,所述需求计算模块、权重计算模块、所述路径规划模块均设置于高性能服务器和云计算平台,用于处理实时数据并快速完成复杂的计算任务。
51、本发明相对于现有技术的优点在于:
52、提升道路使用效率:
53、通过权重公式w(ri)=α/(t(ri)+1)+β×c(ri)+γ×d(ri)+σ/(e(ri)+1),本发明既考虑了每个驾驶者的具体需求,也考虑了整体的道路状况和驾驶者的需求。该公式既包含道路上的实际车辆数量t(ri),道路自身的可通行能力c(ri),驾驶者的需求程度d(ri),也包含了所有驾驶者对道路的总需求e(ri)。这样可以更加有效地利用路网资源,提高道路的使用效率。
54、优化驾驶者的行驶路径:在求解驾驶者的最优路径时,本发明采用了一种基于权重的最短路径算法。这种算法根据每个驾驶者的需求和道路的状况来计算权重,然后根据这些权重来确定最优路径。这样可以为每个驾驶者提供最适合他们的行驶路径,提高驾驶者的行驶体验。
55、减少交通拥堵:本发明在权重公式中引入了一个衰减因子1/(e(ri)+1),这意味着如果一条道路的总需求e(ri)较高,那么这条道路的权重就会被降低。这可以引导驾驶者避开需求高的道路,从而降低这些道路的拥堵程度,减少交通拥堵。
56、自适应调整参数:本发明的权重公式中包含四个参数α、β、γ、σ,这些参数是根据历史数据自动调整的。这使得本发明的方案可以自适应地应对不同的道路状况和驾驶者需求,进一步提高了路网的使用效率。
57、提供个性化的导航服务:通过对每个驾驶者的需求d(ri)的精细化计算,以及基于需求的最短路径算法,本发明可以为每个驾驶者提供个性化的导航服务。这不仅可以提高驾驶者的行驶体验,也可以提高导航系统的用户满意度。
- 还没有人留言评论。精彩留言会获得点赞!