基于车辆通信的道路十字路口盲区车辆预警系统及方法与流程
本发明涉及道路监管,具体是基于车辆通信的道路十字路口盲区车辆预警系统及方法。
背景技术:
1、随着交通的发展,车辆的数量不断增加,交通问题日益突出,其中,车辆在行驶过程中对于道路十字路口盲区的安全问题尤为严重,在道路十字路口,由于建筑物的遮挡、交通标志牌的阻碍或者其他车辆的遮挡,驾驶员会出现视线盲区,无法准确判断盲区内的交通状况,极易导致交通事故的发生;
2、目前难以确定不同车辆不同驾驶人员在十字路口不同位置处的盲区并实时反馈至相应驾驶人员,无法准确评估对应车辆在十字路口的盲区风险性,不利于保证十字路口的交通安全,且无法对即将进入对应十字路口的车辆进行有效提醒,以及难以实现对预警效果的合理判断,预警效果有待提升;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于提供基于车辆通信的道路十字路口盲区车辆预警系统及方法,解决了现有技术难以确定不同车辆不同驾驶人员在十字路口不同位置处的盲区并实时反馈至相应驾驶人员,无法准确评估对应车辆在十字路口的盲区风险性,且无法对即将进入对应十字路口的车辆进行有效提醒,以及难以实现对预警效果的合理判断,不利于保证十字路口交通安全的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、基于车辆通信的道路十字路口盲区车辆预警系统,包括服务器、盲区模拟生成模块、路口实时监控模块、盲区监管分析模块以及车载显示预警端;盲区模拟生成模块通过建立十字路口的3d模型,使用仿真软件模拟车辆在十字路口不同位置的盲区,将不同车辆不同驾驶人员在十字路口不同位置处的盲区发送至服务器进行存储;路口实时监控模块对进入十字路口的车辆进行实时监控,将监控影像发送至盲区检测反馈模块;
4、盲区检测反馈模块基于对应车辆的监控影像以采集到车型和驾驶员状况,以及采集到对应车辆的所处位置,据此从服务器中调取对应车辆的实时盲区,将实时盲区标记为对应车辆的目标预警区;
5、盲区检测反馈模块将对应车辆的目标预警区经服务器发送至盲区监管分析模块,盲区监管分析模块将目标预警区的实时监控影像发送至对应车辆的车载显示预警端,车载显示预警端进行实时监控影像的显示;以及将实时监控影像进行静态对象识别和动态对象识别,若目标预警区存在静态对象或动态对象,则生成盲区预警信号,将盲区预警信号经服务器发送至对应车辆的车载显示预警端,车载显示预警端发出预警并放大相应风险区域。
6、进一步的,盲区模拟生成模块的具体运行过程如下:
7、根据实际十字路口的布局和地形,建立3d模型,所依赖的元素包括道路、建筑物和交通标志;在3d模型中模拟不同类型的车辆,并将其放置在十字路口的不同位置;根据不同的车型和驾驶员的身高、视角因素,模拟驾驶员在车内所能看到的视野;通过模拟驾驶员的视野,找出在十字路口中无法看到的区域并标记为盲区。
8、进一步的,若对应车辆的目标预警区存在静态对象时,采集到对应静态对象的位置,将静态对象的位置与对应车辆的距离标记为静象距离值;将静象距离值与预设静象距离值阈值进行数值比较,若静象距离值未超过预设静象距离值阈值,则将静态对象标记为风险静态对象;若对象车辆的目标预警区内存在动态对象时,则采集到对应动态对象的位置、运动方向以及运动速度,将动态对象的位置与对应车辆的距离标记为动象距离值,将动象距离值与预设动象距离值阈值进行数值比较,若动象距离值未超过预设动象距离值阈值,则将对应动态对象标记为风险动态对象;
9、若动象距离值超过预设动象距离值阈值,则基于动态对象的运动方向和运动速度以及对应车辆的运动方向和运动速度以获取到两者的距离缩小速率;将动象距离值和距离缩小速率进行数值计算得到动象风险值,将动象风险值与预设动象风险阈值进行数值比较,若动象风险值未超过预设动象风险阈值,则将对应动态对象标记为风险动态对象;若对应车辆的目标预警区内存在风险静态对象或风险动态对象时,则生成盲区高风险信号;将盲区高风险信号经服务器发送至对应车辆的车载显示预警端。
10、进一步的,服务器与路口风险检测模块通信连接,路口风险检测模块以对应十字路口的中心为原点,并向与其相通的若干个道路进行延伸,将对应道路距离十字路口原点l1的位置处标记为触发点;通过摄像头采集到接近各个道路触发点的车辆并标记为待提醒车辆;
11、将每天划分为若干个检测时段,采集到当前时刻并确定当前所处检测时段,将当前所处检测时段标记为分析时段;获取到相邻k天中分析时段十字路口的车辆通行值和行人通行值,将对应日期分析时段的车辆通行值和行人通行值进行数值计算得到通行系数;将k个通行系数建立通行集合,将通行集合中数值最大的子集标记为通行上限值,将通行集合进行求和计算并取均值得到通行表现值,将通行上限值与通行表现值进行数值计算得到通行分析值;
12、将通行分析值与若干个预设通行分析值范围进行数值比较,事先设定每组预设通行分析值范围分别对应一组车辆提醒速度值,通过比对获取到十字路口分析时段的所属预设通行分析值范围以确定相应的车辆提醒速度值;将车辆提醒速度值经服务器发送至待提醒车辆的车载显示预警端。
13、进一步的,在确定车辆提醒速度值并将其发送至待提醒车辆的车载显示预警端后,采集到对应待提醒车辆的实际车速,将实际车速与车辆提醒速度值进行数值比较,若实际车速超过预设车辆提醒速度值,则生成降速提醒信号,将降速提醒信号经服务器发送至对应待提醒车辆的车载显示预警端。
14、进一步的,服务器与盲区预警效果分析模块通信连接,盲区预警效果分析模块采集到对应车辆进入十字路口的时刻并标记为车辆驶入时刻,以及采集到对应车辆中车载显示预警端开始进行目标预警区显示的时刻并标记为盲区显示时刻,将盲区显示时刻与车辆驶入时刻进行时间差计算得到盲区划设时长;将盲区划设时长与预设盲区划设时长阈值进行数值比较,若盲区划设时长超过预设盲区划设时长阈值,则将对应盲区划设时长标记为非及时划设时长;
15、将非及时划设时长减去预设盲区划设时长阈值以得到盲区划设超时值,将单位时间内非及时划设时长的数量与盲区划设时长的数量进行比值计算得到盲区非及时划设系数,将所有盲区划设超时值进行求和计算并取均值以得到盲区划时超均值;将盲区划时超均值与盲区非及时划设系数进行数值计算得到盲划评估值,将盲划评估值与预设盲划评估阈值进行数值比较,若盲划评估值超过预设盲划评估阈值,则生成盲区预警不合格信号。
16、进一步的,若盲划评估值未超过预设盲划评估阈值,则设定效果评估周期,采集到效果评估周期内十字路口的事故发生频率和事故频率增长值,将事故发生频率和事故频率增长值与预设事故发生频率阈值和预设事故频率增长值阈值分别进行数值比较,若事故发生频率增长值或事故频率增长值超过对应预设阈值,则生成盲区预警不合格信号;若事故发生频率增长值和事故频率增长值均未超过对应预设阈值,则生成盲区预警合格信号;将盲区预警合格信号或盲区预警不合格信号发送至服务器。
17、进一步的,本发明还提出了基于车辆通信的道路十字路口盲区车辆预警方法,包括以下步骤:
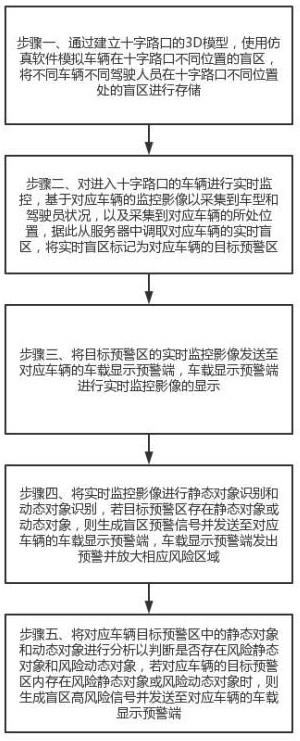
18、步骤一、通过建立十字路口的3d模型,使用仿真软件模拟车辆在十字路口不同位置的盲区,将不同车辆不同驾驶人员在十字路口不同位置处的盲区进行存储;
19、步骤二、对进入十字路口的车辆进行实时监控,基于对应车辆的监控影像以采集到车型和驾驶员状况,以及采集到对应车辆的所处位置,据此从服务器中调取对应车辆的实时盲区,将实时盲区标记为对应车辆的目标预警区;
20、步骤三、将目标预警区的实时监控影像发送至对应车辆的车载显示预警端,车载显示预警端进行实时监控影像的显示;
21、步骤四、将实时监控影像进行静态对象识别和动态对象识别,若目标预警区存在静态对象或动态对象,则生成盲区预警信号并发送至对应车辆的车载显示预警端,车载显示预警端发出预警并放大相应风险区域;
22、步骤五、将对应车辆目标预警区中的静态对象和动态对象进行分析以判断是否存在风险静态对象和风险动态对象,若对应车辆的目标预警区内存在风险静态对象或风险动态对象时,则生成盲区高风险信号并发送至对应车辆的车载显示预警端。
23、与现有技术相比,本发明的有益效果是:
24、1、本发明中,通过盲区模拟生成模块确定不同车辆不同驾驶人员在十字路口不同位置处的盲区,盲区检测反馈模块根据车型和驾驶员状况以及对应车辆的所处位置,据此从服务器中调取对应车辆的实时盲区并标记为对应车辆的目标预警区,盲区监管分析模块将目标预警区的实时监控影像发送至对应车辆的车载显示预警端,以便相应驾驶人员详细掌握其在十字路口的盲区,以及将实时监控影像进行静态对象识别和动态对象识别,并判定是否生成盲区预警信号和盲区高风险信号,实现对驾驶人员的有效提醒,有助于保证其在十字路口的启动安全和行驶安全;
25、2、本发明中,通过路口风险检测模块捕捉待提醒车辆并判断当前时刻十字路口的通行状况,并确定与当前时刻十字路口通行状况相匹配的车辆提醒速度值,以提醒即将进入该十字路口的车辆及时降速,从而保证行驶安全;以及通过盲区预警效果分析模块进行分析以判断是否生成盲区预警不合格信号,将盲区预警合格信号或盲区预警不合格信号发送至服务器,以便及时进行系统优化调整,从而保证道路十字路口盲区车辆预警的预警效率和预警效果,进而有力保障十字路口的交通安全。
- 还没有人留言评论。精彩留言会获得点赞!