一种高速公路应急车道远距离违法停车的精准取证方法与流程
本发明涉及智能交通控制,具体为一种高速公路应急车道远距离违法停车的精准取证方法。
背景技术:
1、基于监控视频的高速公路交通违法行为取证技术是在高速公路智能管控领域的一项重要技术。现在已经有很多完善的高速公路集成监控平台,如申请号cn202222066862.7所公开的高速公路集成平台监控装置,为了能够准确地实现交通事件和交通状态监测,其设置了枪机和球机同时对高速公路进行监控。通常枪机视角比较远,可以拍摄1公里~2公里距离的大范围内的车辆,基于较少的设备就能拍到更多车辆。而球机具备集摄像机系统、变焦镜头、电子云台于一体,稳定性和操控性上比枪式摄像机要好。通常会使用球机的变焦功能实现对车辆、道路等元素的具体细节进行拍摄。所以很多情况下,智能管理系统会使用枪球联动的方式,基于枪机监控到发生问题的车辆,如:违法停车的车辆,然后调用球机去拍车牌,作为车辆违章的证据。然而在高速道路上行驶的车辆较多时,现有技术中的枪机因为拍摄质量不佳,使用传统的图像识别算法基于枪机抓拍的图像,与球机进行联动,对违法车辆的车牌进行确定时,在众多的行驶车辆中识别违停车辆不但耗时长,而且结果准确性不高。
2、最近几年,随着技术的推进,基于深度学习的跨相机目标重识别算法越来越多被应用在实际工作中。其中,基于深度学习网络模型提取车辆的特征的车辆reid算法是比较新兴的一种方法。如:
3、(1)pamtri: pose-aware multi-task learning for vehicle re-identificationusing highlyrandomized synthetic data;zheng tang milind naphadestan birchfield jonathan tremblaywilliam hodge ratnesh kumarshuo wangxiaodong yangnvidia
4、公开了基于densenet网络对车辆特征的提取方法。
5、(2)2014年christian szegedy提出的googlenet也是能够极其有效地能取车辆特征的深度学习网络模型。
6、这些深度学习网络都能够将车辆特征提取为128维或者256维甚至1024维的向量矩阵,基于这些特征向量可以非常准确地描述一台车辆。而如何使用这些车辆特征向量在高速公路监控中来确定违停车辆,以及如何进一步实现对远距离违法停车的车辆进行精准取证是一个需要解决的技术问题。
技术实现思路
1、为了解决现有技术无法快速而精准地实现对远距离违法停车的车辆进行取证的问题,本发明提供一种高速公路应急车道远距离违法停车的精准取证方法,其可以利用现有设备实现对远距离违法停车的车辆进行精准取证,成本低、费时短,实用性强。
2、本发明的技术方案是这样的:一种高速公路应急车道远距离违法停车的精准取证方法,其包括以下步骤:
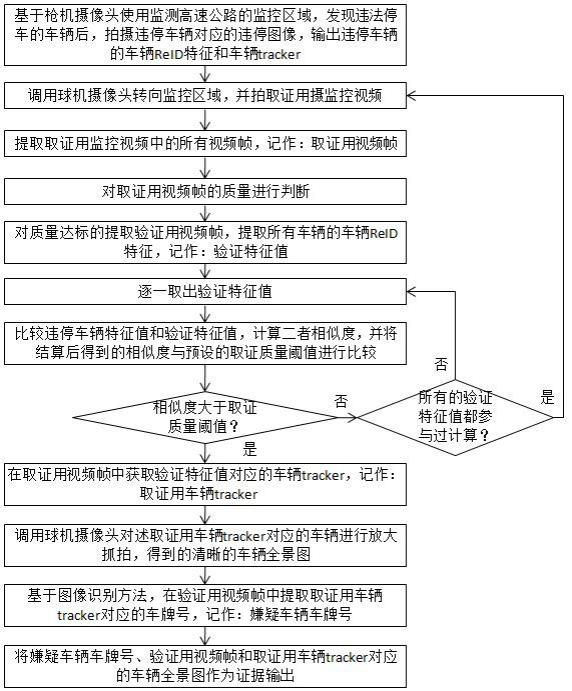
3、s1:基于枪机摄像头使用车辆违法监测算法实时监测高速公路的监控区域;
4、其特征在于,其还包括以下步骤:
5、s2:枪机摄像头发现违法停车的车辆后,拍摄违停车辆对应的违停图像,输出有效报警,并且基于车辆reid算法,输出所述违停车辆的车辆reid特征和车辆tracker;并将所述违停车辆的车辆reid特征记作:违停车辆特征值;
6、所述车辆reid特征为表述目标车辆的特征向量构成的特征矩阵;
7、所述车辆tracker上一个id值,用于在图像中唯一标记目标车辆;
8、s3:调用球机摄像头转向所述监控区域,并拍取证用摄监控视频;
9、s4:提取所述取证用监控视频中的所有视频帧,记作:取证用视频帧;
10、s5:对所述取证用视频帧的质量进行判断,质量判断操作具体表以下步骤:
11、a1:设置质量判断元素;
12、所述质量判断元素包括:光照度、偏色度、模糊程度、条纹干扰程度;
13、a2:逐一取出每一帧所述取证用视频帧;
14、a3:基于所述质量判断元素对所述取证用视频帧的质量进行判断;
15、质量判断结果包括:达标和不达标;
16、达标:表示图像对应的所述质量判断元素中所有元素都达到了达到取证用的标准;
17、不达标:表示图像对应的所述质量判断元素中存在没有达到取证用标准的元素;
18、如果所述取证用视频针的对应的质量判断结果为不达标,则执行步骤a4;
19、否则,将质量判断达标的所述取证用视频帧设置为:验证用视频帧,执行步骤s7;
20、a4: 循环执行步骤a2~a3,直至所述取证用监控视频中的所有视频针都进行了所述质量判断操作,仍没有找到达标视频帧,则执行步骤s6;
21、s6:循环执行步骤s3~s5;
22、s7:提取所述验证用视频帧中所有车辆的所述车辆reid特征,记作:验证特征值;
23、s8:逐一取出所述验证特征值;
24、s9:基于比较所述违停车辆特征值和所述验证特征值,计算二者相似度,并将相似度与预设的取证质量阈值进行比较;
25、如果相似度大于所述取证质量阈值,则,获取所述验证特征值对应的车辆tracker,记作:取证用车辆tracker,并执行步骤s11;
26、否则,寻执行步骤s8~s9,直至所有的所述验证特征值都参与计算后,执行步骤s10;
27、s10:循环执行步骤s3~s9;
28、s11:调用球机摄像头对述取证用车辆tracker对应的车辆进行放大抓拍,得到的清晰的车辆全景图;
29、s12:基于图像识别方法,在所述验证用视频帧中提取所述取证用车辆tracker对应的车牌号,记作:嫌疑车辆车牌号;
30、s13:将所述嫌疑车辆车牌号、所述验证用视频帧和所述取证用车辆tracker对应的车辆全景图作为证据输出。
31、其进一步特征在于:
32、步骤s9中,基于余弦相似度计算所述违停车辆特征值和所述验证特征值的相似度;
33、步骤a3中,基于所述质量判断元素对所述取证用视频帧的质量进行判断的具体方法,包括以下步骤:
34、a31:对所述取证用视频帧对应的所述质量判断元素,逐一进行打分:
35、针对图像的光照度进行打分,打分区间为:0-10分;
36、针对图像的偏色程度进行打分,打分区间为:0-100分打分;
37、针对图像的模糊程度进行打分,打分区间为:0-100分打分;
38、针对图像条纹干扰程度进行打分,打分区间为:0-100分打分;
39、a32:为每一项所述质量判断元素设置一个合格分数;
40、a33:将每一项所述质量判断元素对应的打分与其合格分数进行比较,如果所有的打分都合格,则所述取证用视频帧对应的质量判断结果为达标;
41、否则,所述取证用视频帧对应的质量判断结果为不达标。
42、本技术提供的一种高速公路应急车道远距离违法停车的精准取证方法,其通过质量判断操作来确保球机拍摄的用来提取特征向量的图像的可用性,降低验证特征值提取的难度,提高整体计算速度,以及提高最终计算结果的准确性;通过枪机识别远距离应急车道违法停车行为,并解析车辆reid特征;然后联动球机进行拉近,并解析画面内车辆reid特征,同时通过比对枪机与球机的车辆reid特征,能准确判断两次抓拍的车辆是否为同一辆发生高速公路应急车道违法停车的车辆,进而完成对远距离应急车道违法停车行为的精准取证。基于本方法无需增加新硬件,利用现有设备即可实现对远距离违法停车的车辆进行精准取证,成本低、费时短,实用性强。
- 还没有人留言评论。精彩留言会获得点赞!