一种停车位寻找系统及方法
本发明涉及车辆停车领域,尤其涉及一种基于区块链、slam与视觉识别的智能停车位寻找系统及方法。
背景技术:
1、近年来,随着中国经济的迅猛发展,私家车已逐渐成为家庭出行的必备交通工具,“出行十分钟,停车半小时”等问题日趋严重,大大降低了居民生活幸福感和获得感。传统的停车场管理系统存在信息不透明、车位分配不均等问题,导致司机在寻找停车位时耗费大量时间。为解决这一问题,本发明提出了一种基于区块链、slam与视觉识别的智能停车位寻找系统及方法。
技术实现思路
1、本发明的目的是提高停车场的使用效率,降低用户寻找车位的时间成本,提升用户体验,故此提出了一种基于区块链、slam技术和视觉识别技术的智能停车位寻找方法及系统。系统首先利用区块链技术实现分布式、安全、可靠的车位信息管理。用户通过智能终端设备访问基于区块链的停车位信息,查询附近空闲车位。系统根据用户当前位置和车位信息,运用slam技术计算最佳停车路径,并提供导航指引。用户抵达目标车位后,系统通过视觉识别技术确认车位仍然空闲,同时将车辆信息与车位信息关联,更新区块链网络中的车位状态为占用。当用户离开车位时,系统再次利用视觉识别技术检测车位状态,并在确认车位为空闲后,将区块链网络中的车位状态更新为可用。为确保数据准确性,系统会定期对停车场内的车位状态进行视觉监测,并校准区块链网络中的车位信息。通过这种智能停车位寻找方法及系统,能够提高停车场的使用效率,降低用户寻找车位的时间成本,提升用户体验。
2、本发明是通过以下技术手段实现上述技术目的的。
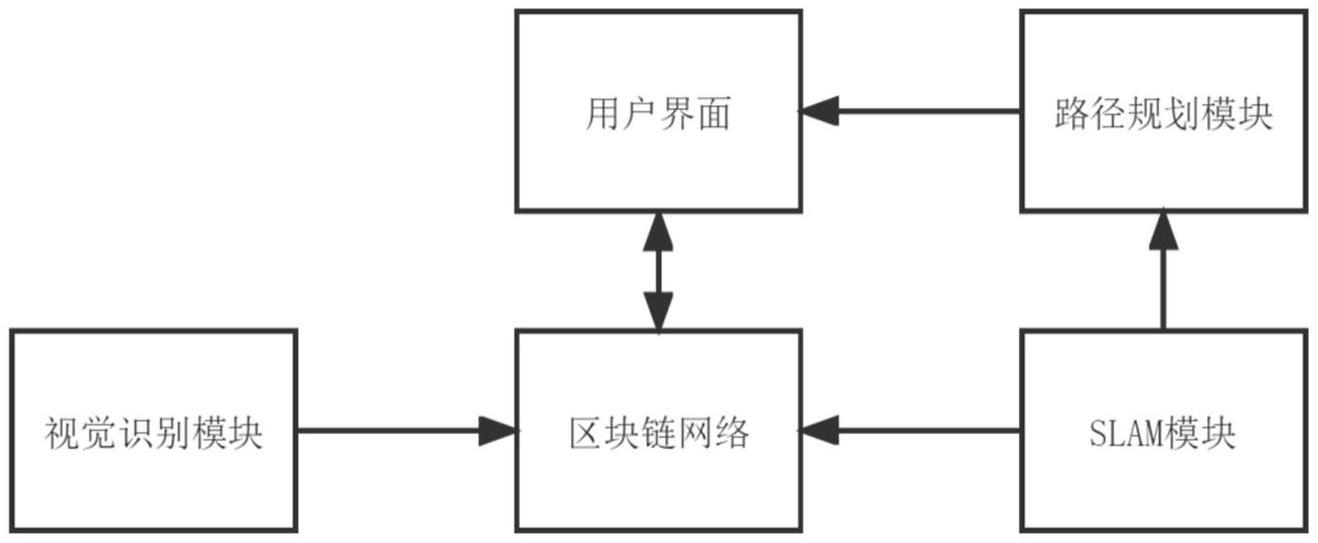
3、一种智能停车位寻找系统,其由以下组件构成:
4、(1)区块链网络。区块链网络负责存储和更新车位状态信息,实现数据的实时共享与不可篡改性。它包括多个节点,每个节点保存一份完整的车位信息数据。
5、(2)视觉识别模块。视觉识别模块负责收集实时图像数据,并通过深度学习算法识别出空闲车位。视觉识别模块的输出结果用于更新区块链网络中的车位状态。
6、(3)slam模块。slam模块负责实时定位和地图构建,包括处理传感器数据、更新地图和车辆位置等功能。它与视觉识别模块协同工作,提供实时的地图数据。
7、(4)路径规划模块。路径规划模块根据用户当前位置、目标车位位置和地图数据,计算最佳停车路径。它与slam模块紧密配合,实时更新导航路径。
8、(5)用户界面。用户界面负责与用户进行交互,如查询空闲车位、接收导航指引等。用户界面可以是智能手机应用程序、车载导航仪等终端设备。
9、说明书的附图其实可以表示各模块的连接关系。如果箭头从a指向b,则说明a的数据传输到b;如果a和b之间的箭头是双向的,那么说明二者数据是双向传输的。
10、进一步,所述用户界面具体包括智能手机、平板电脑、笔记本电脑以及台式电脑。
11、本发明的一种停车位寻找系统的方法,包括以下步骤:
12、步骤1,用户通过智能终端设备(如智能手机或车载导航仪)访问基于区块链的停车位信息,查询附近空闲车位;
13、步骤2,系统根据用户当前位置和车位信息,运用slam技术计算最佳停车路径,并提供导航指引;
14、步骤3,用户抵达目标车位后,系统通过视觉识别技术确认车位仍然空闲。同时,系统将车辆信息与车位信息关联,更新区块链网络中的车位状态为占用;
15、步骤4,当用户离开车位时,系统再次利用视觉识别技术检测车位状态。一旦确认车位为空闲,系统将区块链网络中的车位状态更新为可用;
16、步骤5,为确保数据准确性,系统会定期对停车场内的车位状态进行视觉监测,并校准区块链网络中的车位信息。
17、进一步,步骤1具体包括:
18、步骤1.1:设空闲车位的集合为v,查询范围半径为r,用户当前位置为pu,在此范围内,空闲车位的集合可表示为vr={vi|dist(pu,vi)≤r},其中dist表示两点之间的距离计算函数,vi表示空闲的车位;
19、步骤1.2:使用实用拜占庭容错算法作为共识算法。
20、进一步,步骤2具体包括:
21、步骤2.1:设用户当前位置为pu,目标车位位置为g,地图为m,路径规划算法为a,最佳路径为l,计算过程可表示为l=a(pu,g,m);
22、步骤2.2:数据处理中心负责接收来自停车场内传感器的实时数据,并运用slam技术对这些数据进行处理,实时更新地图m,在数据处理中心,还可以将a*算法应用于实时更新的地图m,为用户规划最佳停车路径;
23、步骤2.3:用户通过智能终端设备向数据处理中心发送请求,请求包含用户当前位置pu和目标车位位置g,数据处理中心根据实时地图m计算出最佳停车路径l,即l=a(pu,g,m),并将导航指令发送至用户的智能终端设备,为用户提供实时的导航指引。
24、进一步,步骤3具体包括:
25、设图像数据为i,视觉识别算法为f,识别结果为r,计算过程可表示为r=f(i),当r确认车位为空闲时,系统将车辆信息与车位信息关联,并更新区块链网络中的车位状态为占用,设车位状态为s,s=occupied,代表车位处于占用状态;
26、采用深度学习中的卷积神经网络cnn作为视觉识别算法f来确认车位是否空闲,具体过程为:
27、3.a.输入图像数据i;
28、3.b.通过多个卷积层c提取图像特征,卷积层使用滤波器在图像上进行局部扫描,提取局部特征,卷积操作的计算公式为:
29、c(i,j)=sum(f(i(m,n)*w(m,n)))
30、其中i,j表示输出特征图的坐标,m,n表示滤波器的坐标,w(m,n)是滤波器的权重,f表示激活函数;
31、3.c.通过池化层p降低特征图的维度,池化层可以是最大池化、平均池化等,池化操作的计算公式为:
32、p(i,j)=max(i(m,n))或p(i,j)=mean(i(m,n))
33、其中i,j表示池化输出的坐标,m,n表示池化窗口内的坐标。
34、3.d.通过全连接层fc将提取到的特征进行分类,全连接层的计算公式为:
35、fc=f(w*i+b)
36、其中,f表示激活函数,b表示参数;
37、3.e.输出识别结果r
38、为了使cnn能够准确识别车位状态,需要用大量带有标签的车位图像数据对cnn进行训练,在训练过程中,cnn会自动学习到一组适合识别车位状态的权重参数,经过训练的cnn可以用于推理,即输入一张未知状态的车位图像,输出识别结果r;
39、通过上述计算流程,可以得到r=f(i),当r确认车位为空闲时,系统将车辆信息与车位信息关联,并更新区块链网络中的车位状态为占用,设车位状态为s,s=occupied。
40、本发明的有益效果是:
41、信息透明:通过区块链技术实现车位信息的实时更新与共享,提高信息透明度,方便用户查询附近空闲车位;
42、定位精确:结合slam技术,实时构建车辆周围环境的地图并定位车辆在地图中的位置,提高车位推荐的准确性;
43、视觉识别:采用视觉识别技术检测车位状态,实时更新区块链网络中的车位信息,保证数据准确性;
44、路径规划:根据用户当前位置和车位信息,为司机提供最佳路径规划,节省寻找停车位的时间;
45、安全可靠:区块链技术的不可篡改性保证了车位信息的可靠性,避免了恶意篡改和虚假信息的产生。
- 还没有人留言评论。精彩留言会获得点赞!