一种无人机反制方法、系统、设备及存储介质与流程
本发明属于无人机管控领域,具体涉及一种无人机反制方法及相关设备。
背景技术:
1、目前无人机的应用已成为国内各行业的朝阳技术,得到了蓬勃发展,在农业、石油石化、能源电力等领域都发挥巨大作用。但是,如果无人机使用不当也会对社会带来威胁;因此,针对“黑飞”无人机带来的威胁,亟需对无人机应用进行管控,并且采取针对空域的相关管理措施。
2、当前,入侵威胁的飞行器大多数为“低、慢、小”,具有飞行高度低、运动速度慢、雷达散射面积小、成本低、体型小等特点,常被用于偷窥、设备破坏等操作。因此,目前对于黑飞无人机的防御手段研究迫在眉睫,尤其针对能源、电力等重要基础设施,更需要加大无人机入侵的防范。
3、常规的无人机防御措施,一般依赖于人工操作,并且只能等到无人机进入防护区域后,才能采取后续的防御反制措施,无法对无人机入侵源进行提前预判,时效性较差。
技术实现思路
1、为克服上述技术的缺点,本发明提供一种无人机反制方法、系统、设备及存储介质,能够解决当前无人机防御措施无法提前对无人机入侵源的飞行轨迹进行提前预判的技术问题。
2、为了达到上述目的,本发明采用技术方案如下:
3、一种无人机反制方法,应用于分析终端,包括:
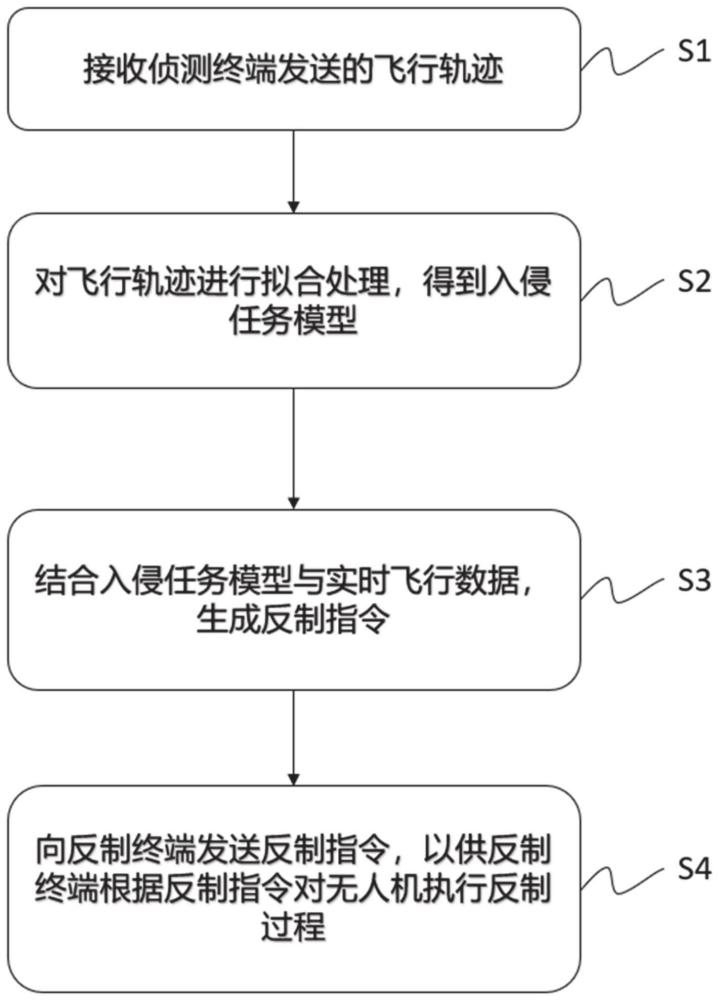
4、接收侦测终端发送的飞行轨迹;
5、对飞行轨迹进行拟合处理,得到入侵任务模型;
6、结合入侵任务模型与实时飞行数据,生成反制指令;
7、向反制终端发送反制指令,以供反制终端根据反制指令对无人机执行反制过程。
8、进一步地,飞行轨迹的获取步骤如下:
9、采集无人机的飞行动态数据;
10、利用tdoa算法对飞行数据进行计算处理,得到入侵源状态信息;
11、根据入侵源状态信息,计算得到飞行轨迹。
12、进一步地,其中,所述飞行动态数据包括无人机的位置、方向和速度。
13、进一步地,根据采集多个时刻对应的无人机的位置,计算得到无人机的速度、方向和俯仰角。
14、进一步地,所述入侵任务模型包括飞行预测轨迹以及预测入侵区域的方向信息、区域信息和角度信息。
15、进一步地,反制过程的具体步骤如下:
16、反制终端根据反制指令向指定地点移动,实时采集待打击区域的动态图像,当入侵源位于动态图像中,生成打击指令,向打击终端发送打击指令,由打击终端根据打击指令对无人机进行打击。
17、进一步地,打击结束后,打击终端发送返航请求,根据请求反馈指令执行返航。
18、一种无人机反制系统,用于实现上述无人机反制方法的步骤,包括:
19、数据接收模块,用于接收侦测终端发送的飞行轨迹;
20、第一数据处理模块,用于对飞行轨迹进行拟合处理,得到入侵任务模型;
21、第二数据处理模块,用于结合入侵任务模型与实时飞行数据,生成反制指令;
22、指令输出模块,用于向反制终端发送反制指令,以供反制终端根据反制指令对无人机执行反制过程。
23、一种设备,包括:
24、存储器,用于存储计算机程序;
25、处理器,用于执行所述计算机程序时实现上述无人机反制方法的步骤。
26、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时用于实现上述无人机反制方法的步骤。
27、相比于现有技术,本发明具有有益效果如下:
28、本发明提供一种无人机反制方法,本方法通过侦测终端采集无人机入侵源当前的状态信息并将飞行轨迹传输至分析终端;分析终端在接收飞行轨迹后,对其进行拟合处理,计算得到入侵任务模型;根据入侵任务模型结合当前采集的实时飞行数据,生成并传输反制指令;反制终端根据反制指令对无人机执行反制过程,实现对目标的及时且精准的打击;本方法根据采集到的飞行信息计算生成飞行轨迹,利用拟合处理对无人机的入侵行为提前预判,在无人机还未到达指定地点前,反制终端根据反制指令提前移动至指定地点,一旦无人机出现到指定区域,反制终端立即执行反制过程,对目标进行及时且精准的打击。本方法原理简单,便于实施,具有良好的推广应用价值。
29、优选地,本方法中,利用tdoa算法对飞行数据进行计算处理,采用tdoa算法,能够精准得到无人机的位置、方向和速度。
技术特征:
1.一种无人机反制方法,其特征在于,应用于分析终端,包括:
2.根据权利要求1所述的一种无人机反制方法,其特征在于,飞行轨迹的获取步骤如下:
3.根据权利要求2所述的一种无人机反制方法,其特征在于,其中,所述飞行动态数据包括无人机的位置、方向和速度。
4.根据权利要求3所述的一种无人机反制方法,其特征在于,根据采集多个时刻对应的无人机的位置,计算得到无人机的速度、方向和俯仰角。
5.根据权利要求1所述的一种无人机反制方法,其特征在于,所述入侵任务模型包括飞行预测轨迹以及预测入侵区域的方向信息、区域信息和角度信息。
6.根据权利要求1所述的一种无人机反制方法,其特征在于,反制过程的具体步骤如下:
7.根据权利要求6所述的一种无人机反制方法,其特征在于,打击结束后,打击终端发送返航请求,根据请求反馈指令执行返航。
8.一种无人机反制系统,用于实现权利要求1-7任一项所述无人机反制方法的步骤,其特征在于,包括:
9.一种设备,其特征在于,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时用于实现权利要求1-7任一项所述无人机反制方法的步骤。
技术总结
本发明公开了一种无人机反制方法、系统、设备及存储介质,本方法通过侦测终端采集无人机入侵源当前的状态信息并将飞行轨迹传输至分析终端;分析终端在接收飞行轨迹后,对其进行拟合处理,计算得到入侵任务模型;根据入侵任务模型结合当前采集的实时飞行数据,生成并传输反制指令;反制终端根据反制指令对无人机执行反制过程,实现对目标的及时且精准的打击;本方法根据采集到的飞行信息计算生成飞行轨迹,利用拟合处理对无人机的入侵行为提前预判,在无人机还未到达指定地点前,反制终端根据反制指令提前移动至指定地点,一旦无人机出现到指定区域,反制终端立即执行反制过程,能够对目标进行及时且精准的打击。
技术研发人员:王恩民,任鑫,武青,赵鹏程,杜静宇,魏昂昂,杨雪
受保护的技术使用者:中国华能集团清洁能源技术研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!