一种行人与自动驾驶车辆的交互博弈均衡策略探究方法
本发明涉及自动驾驶决策与交通安全领域,具体是一种行人与自动驾驶车辆的交互博弈均衡策略探究方法
背景技术:
1、本发明旨在研究智能网联化自动驾驶渗透水平由低到高变化下,城市交叉口汇集多种交通参与者异质交通流的冲突博弈问题,尤其针对过街行人与异智车辆(智能单车与多车智能)之间的冲突问题,考虑到自动驾驶交通场景下,如何同时保证行人与自动驾驶车辆之间的博弈均衡,即在车辆自动驾驶智能网联化的大趋势下,兼顾安全与效率的交通管理、载运工具策略制定相关理论和解决方法是迫切需要攻克的难题。
2、《智能网联汽车技术路线图2.0》研究判断,到2025年,我国pa、ca级智能网联汽车销量占当年汽车总销量比例超过50%,c—v2x终端新车装配率达50%,未来智能单车和智能网联汽车形成混行交通流是汽车行业发展要求下的必然趋势。
3、随着当下智能网联汽车的占比增加,虽然智能网联汽车能够通过计算机视觉等感知到周边行人的信息,并且通过大数据平台与其他网联汽车实现信息共享;但是由于智能单车只能通过自身感知设备获取周围信息,无法及时获取路侧行人交通流信息,因此在智能单车和多车智能混行的情况下,信息不进行共享,行人与车辆之间又难以实现信息准确识别与传达,因而会出现冲突风险增加和潜在效率损失的情况(如图1、2所示),存在不同智能水平下人车的交互风险。除此之外,行人与混行态的自动驾驶的冲突风险随着智能网联汽车的占比增加而不断变化。
4、随着智能网联汽车占智能汽车比例由少到多,带来的自动驾驶车辆渗透水平也会由低变高,异智交通流混行现象日益凸显,目前相关方面研究多数为研究行人与单一交通流下的交互博弈或研究自动驾驶车辆对行人的预测和感知,存在着自动驾驶车辆及混行态交通流与行人交互博弈建模深度低和该模型下人车交互均衡博弈的揭示不足的问题。
5、基于此,本发明提出一种行人与混合智能汽车冲突博弈均衡策略的探究方法,用于探讨交叉口混合智能汽车间因信息的不完全性而造成行人与混合交通流之间的安全问题。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种行人与自动驾驶车辆的交互博弈均衡策略探究方法,通过混合自动驾驶跟驰模型与博弈模型的耦合建模,将自动驾驶跟驰模型反映信息不共享程度对车辆行驶工况的影响程度引用到动态博弈模型中,再利用动态博弈模型反映博弈双方的动态反馈机制以及行为-风险双向影响机制的内在特点,从而求解混行态下动态博弈模型的均衡点,解决现有技术当中对混合自动驾驶与行人交互博弈理论建模深度浅的问题。
2、为实现上述目的,本发明提供如下技术方案:
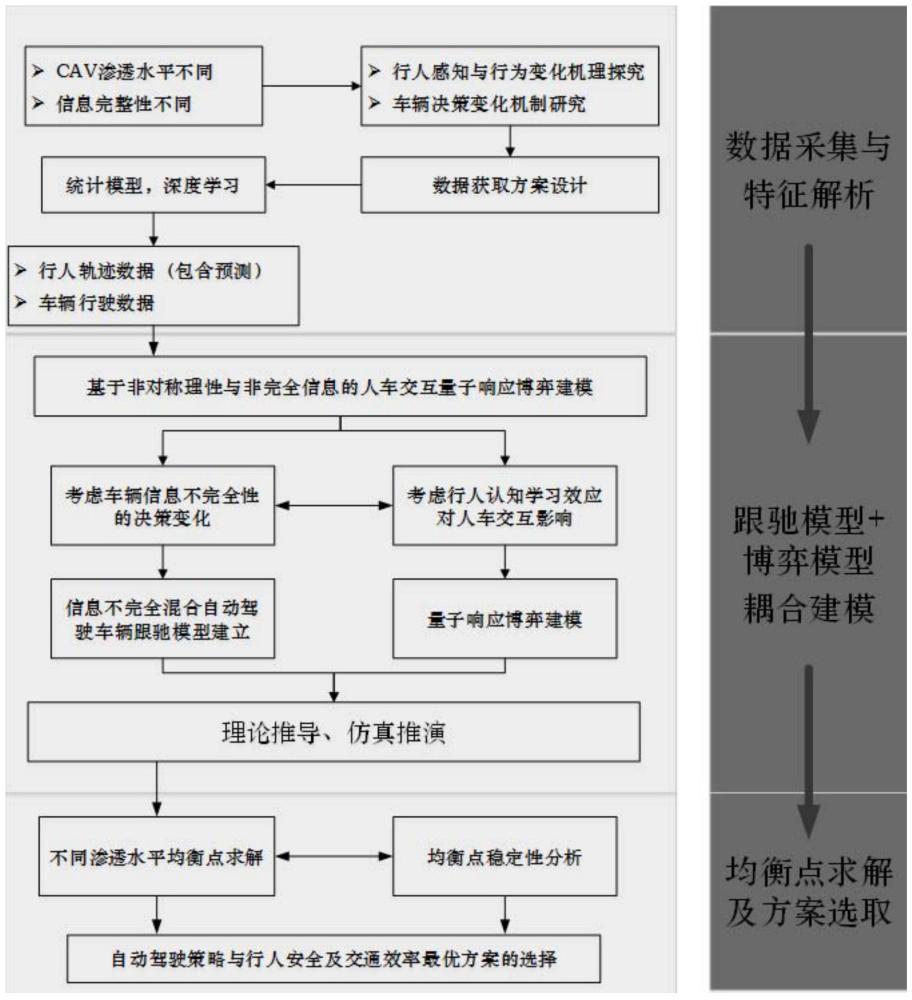
3、一种行人与自动驾驶车辆的交互博弈均衡策略探究方法,包括以下步骤:
4、(1)获取大量交叉口人车交互场景视频,通过人工筛选出冲突区域可能发生驾驶人与行人的交互的视频片段;从筛选出的视频片段中提取出行人和车辆的运动参数、道路基本参数以及其它影响驾驶行为与过街行为的相关变量数据;
5、(2)构建跟驰模型,跟驰模型包括智能单车跟驰模型、智能网联汽车跟驰模型,用于获取智能单车或智能网联汽车混行状态下的加速度;构建车辆期望速度函数,用于获得车辆期望速度;
6、(3)构建适合混合交通流信息非完全态的人车博弈均衡模型,人车博弈均衡模型中嵌入有跟驰模型、车辆期望速度函数;利用跟驰模型、车辆期望速度函数获得的混行状态下的车辆加速度、车辆期望速度作为解释变量的一部分,与从步骤(1)筛选影响驾驶行为与过街行为的关键影响因素共同纳入效用方程中,将自动驾驶车辆让行概率和行人过街概率表示出来;
7、(4)针对于步骤(3)中的人车博弈均衡模型构建求解模型,求解模型用于获得混合交通流信息非完全态的人车博弈均衡模型的均衡点;
8、(5)将步骤(4)中的求解模型应用于sumo和carla进行联合仿真,分别推演出单点博弈下的行人与车辆采取某个特定策略的概率,以及到达均衡点的迭代过程,同时分析均衡点的稳定性,通过综合考虑均衡点的状态和稳定性参数,得出混行态下行人与自动驾驶车辆交互博弈的“效率-安全”优化方案。
9、所述智能单车跟驰模型为:
10、ak(t)=k[(γvk,i(δxk,i(t-τm))+κvk,i+1(δxk,i+1(t-τc))-vk(t)]+λ[βδvk,i(t-τm)] (1),
11、在智能单车跟驰模型中,智能单车与智能单车、智能网联汽车之间都没有网络数据连接,只有前后雷达传感器与机器视觉提供感知信息;因此智能单车跟驰模型的加速度期望函数只与车辆自身感知系统有关,而与混行状态无关;
12、ak(t)、vk(t)为智能单车k在时刻t的加速度、速度;
13、δxk,i(t-τm)=xi(t-τm)-xk(t-τm)为智能单车k对邻近前车i视觉感知产生的纵向位置差;τm为机器视觉感知延时;
14、δvk,i(t-τm)=vi(t-τm)-vk(t-τm)为智能单车k对邻近前车i视觉感知产生的纵向速度差;
15、δxk,i+1(t-τc)=xk(t-τc)-xi+1(t-τc)为雷达传感器提供给智能单车k与相邻跟随车辆i+1的纵向位置差;
16、τc为通信延时,在智能单车中,该项为车载网络内部通信延时,γ,β为自动驾驶感知权重;vk,i(.)表示智能单车k与邻近前车i交互产生的车辆期望速度函数,vk,i+1(.)表示智能单车k与邻近后车i+1交互产生的车辆期望速度函数;
17、κ为前方车辆i对自动驾驶决策的影响程度,k>0,λ>0为敏感性参数。
18、智能网联汽车跟驰模型的构建步骤如下:
19、假设在智能网联汽车与智能单车混行状态下,智能网联汽车自前往后依次排列为0、1、2、……j-1、j、j+1、……,智能单车任意混行其中;
20、情况一,假设智能网联汽车j的相邻前车为智能网联汽车j-1,则智能网联汽车跟驰模型为:
21、
22、aj(t)、vj(t)为智能网联汽车j在时刻t的加速度、速度;
23、δxj,j-n(t-τc)=xj-n(t-τc)-xj(t-τc)为通信网络提供给智能网联汽车j与其前方智能网联汽车j-n的纵向位置差;
24、δvj,j-n(t-τc)=vj-n(t-τc)-vj(t-τc)为通信网络提供给智能网联汽车j与其前方智能网联汽车j-n的纵向速度差;
25、δxj,i+1(t-τc)=xj(t-τc)-xj+1(t-τc)为雷达传感器提供给智能网联汽车j与相邻跟随车辆i+1的间距;
26、δxj,j-1(t-τc)=xj-1(t-τc)-xj(t-τc)为雷达传感器提供给智能网联汽车j与智能网联汽车j-1的间距;
27、vj,j-n(.)表示智能网联汽车j与智能网联汽车j-n交互产生的车辆期望速度函数;
28、τc为通信延时;k>0,λ>0为敏感性参数;p为车辆期望函数系数,wj,j-n为不同前车对智能决策机制的影响权重:
29、
30、情况二、假设智能网联汽车j的相邻前车为智能单车k时,则智能网联汽车跟驰模型为:
31、
32、aj(t),vj(t)为智能网联汽车j在时刻t的加速度,速度;
33、δxj,j-n(t-τc)=xj-n(t-τc)-xj(t-τc)为通信网络提供给自动驾驶车辆j与前方智能网联汽车j-n的纵向位置差;
34、δvj,j-n(t-τc)=vj-n(t-τc)-vj(t-τc)为通信网络提供给自动驾驶车辆j与前方智能网联汽车j-n的纵向速度差;
35、δxj,i+1(t-τc)=xj(t-τc)-xi+1(t-τc)为雷达传感器提供给智能决策机制车辆j与相邻跟随i+1的纵向位置差;
36、δxj,k(.)为智能网联汽车j对前方相邻智能单车k的机器视觉感知产生的纵向位置差;
37、δvj,k(.)为智能网联汽车j对前方相邻智能单车k的机器视觉感知产生的纵向速度差;
38、vj,k(.)为智能网联汽车j与智能单车前车k交互产生的车辆期望速度函数;
39、τm为机器视觉感知延时;k>0,λ>0为敏感性参数;γ,β为自动驾驶感知权重;p为车辆期望函数系数,wj,j-n为不同前车对智能决策机制的影响权重:
40、v(δx)为车辆期望速度函数,由下分段函数表示:
41、
42、f(δx)为连续单调函数,可以表达为:
43、
44、δxst为使汽车停止的人车距离差,δxgo为允许汽车行驶的人车距离差,vmax为车辆速度以最高车速行驶。
45、所述构建适合混合交通流信息非完全态的人车博弈均衡模型,包括:
46、(3.1)将s定义为博弈参与者的选择集,s1为自动驾驶的决策集,s2为行人的选择集,规定博弈双方在交互过程中会采取最高效用的决策,并假定对方同样采取这样决策策略,同时考虑风险变化对于决策效益的负向影响;
47、(3.2)将步骤(1)中提取出行人和车辆的运动轨迹、交通参数代入到跟驰模型、车辆期望速度函数中,得到混行状态下的车辆加速度、车辆期望速度;从步骤(1)提取出行人和车辆的运动轨迹、交通参数中筛选出影响驾驶行为与过街行为的关键影响因素,并将这些关键影响因素与车辆加速度、车辆期望速度共同纳入效用方程中,得出驾驶人与行人决策收益矩阵,采用logit-qre形式将自动驾驶车辆让行概率和行人过街概率表示出来。
48、与现有技术相比,本发明的有益效果是:
49、1、本发明基于混合自动驾驶跟驰模型,结合量子响应均衡博弈理论,建立混合自动驾驶交通流与行人交叉口动态博弈模型,利用自动驾驶跟驰模型反映信息不共享程度对车辆行驶工况的影响程度,利用动态博弈模型反映博弈双方的动态反馈机制以及行为-风险双向影响机制的内在特点,结合模型和理论,将信息不共享性由跟驰模型体现,从而求解混行态下动态博弈模型的均衡点,解决现有技术当中对混合自动驾驶与行人交互博弈理论建模深度浅的问题。
50、2、本发明基于sumo和carla的联合仿真,使用较为成熟的方案为求解单点博弈下的行人与车辆采取不同策略的概率和均衡点的迭代过程,为不同自动驾驶渗透水平的交互博弈模型提供建模思路。
- 还没有人留言评论。精彩留言会获得点赞!