基于车路协同的动态感知方法及装置与流程
本发明涉及数据处理,尤其涉及一种基于车路协同的动态感知方法及装置。
背景技术:
1、随着现时的互联网信息技术与大数据技术的飞速发展,传统的道路交通管理模式已经逐渐落后于现时的大数据时代的发展模式,且在传统的道路交通管理模式中对实时道路交通信息的采集难度大,在数据分析的过程中效率与准确率不高,从而导致不能精确地识别路面信息以及快速地排除交通安全存在的隐患。因此,数字化、智能化的信息管理模式显得尤其重要。现时提供一种基于车路协同的动态感知方法及装置,对道路交通信息的获取与分析智能化,以解决现时道路交通信息的采集难度大、分析效率以及准确率不高的技术问题。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种基于车路协同的动态感知方法,能够有利于降低道路交通信息的采集难度,同时提高信息分析效率以及准确率。
2、为了解决上述技术问题,本发明第一方面公开了一种基于车路协同的动态感知方法,所述方法包括:
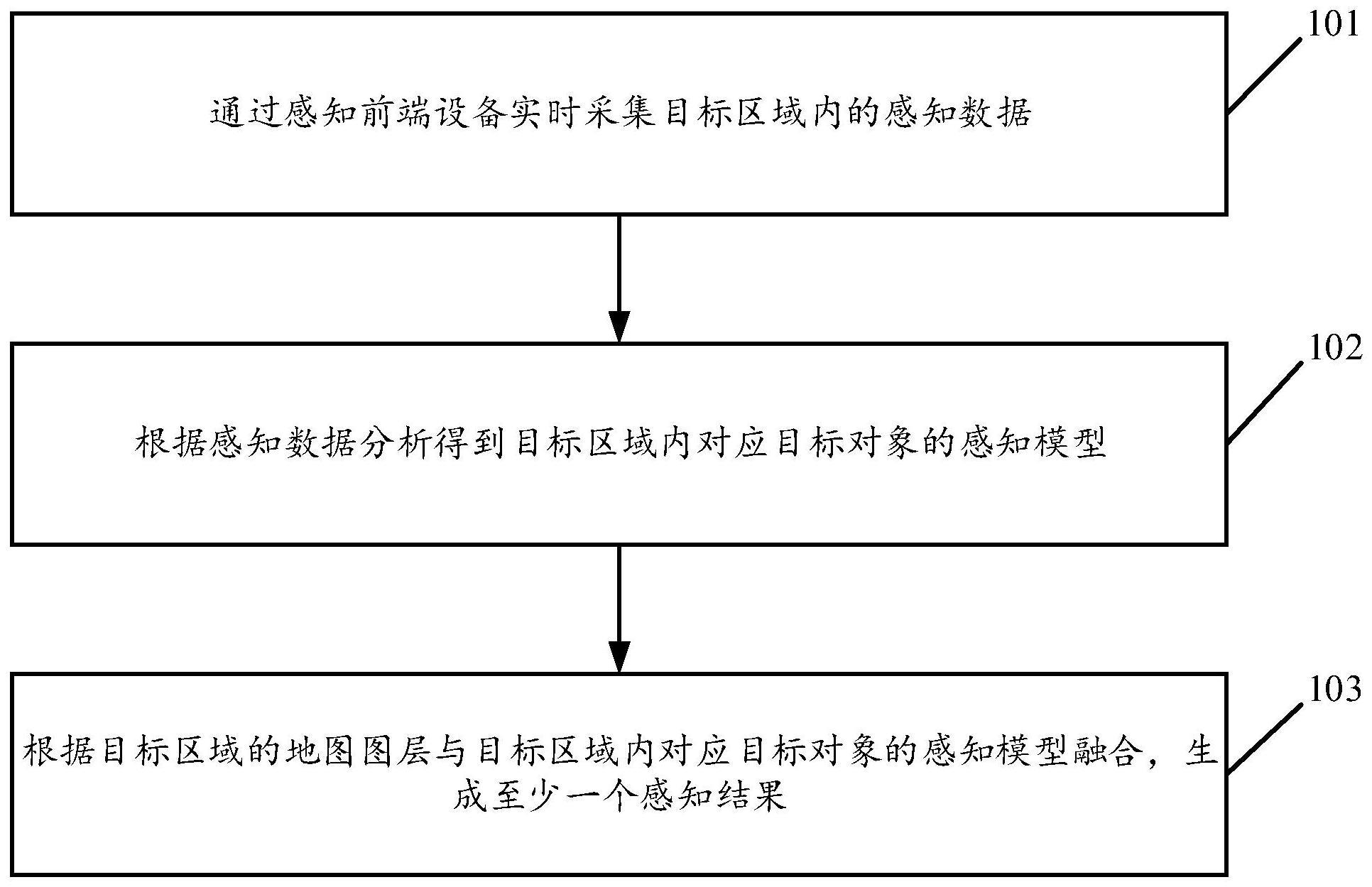
3、通过感知前端设备实时采集目标区域内的感知数据,其中,所述感知数据包括行人数据、车辆数据、道路数据、气象数据、控制信号数据中的至少一种;
4、根据所述感知数据分析得到所述目标区域内对应目标对象的感知模型,并根据所述目标区域的地图图层与所述目标区域内对应目标对象的感知模型融合,生成至少一个感知结果,所述感知结果用于对所述目标区域的交通状况进行调度管控。
5、作为一种可选的实施方式,在本发明第一方面中,所述感知前端设备包括:车路协同前端设备、交通指示前端设备、公安交管前端设备中的至少一种;
6、其中,所述车路协同前端设备包括:rsu设备、雷达设备、摄像设备、气象监测设备中的至少一种,所述交通指示前端设备包括:交通照明设备、交通标识设备、交通信号控制设备、传感设备中的至少一种,所述公安交管前端设备包括警示信号控制装置、电警卡口装置中的至少一种;
7、所述行人数据包括:历史时段内所述目标区域的行人的总数量、行人的分布密度、行人的身份标识、行人的地理位置、行人的移动轨迹中的至少一种,所述车辆数据包括:历史时段内所述目标区域的车辆的总数量、车辆的行驶速度、车辆的行驶轨迹、车辆的分布密度,车辆的车辆标识、车辆的车辆类型中的至少一种,所述道路数据包括:历史时段内所述目标区域的道路的地理位置、道路的标识参数、道路的环境参数中的至少一种,所述控制信号数据包括:历史时段内所述目标区域的道路交通信号数据、道路警示信号数据中的至少一种,所述气象数据包括:历史时段内所述目标区域的气温数据、湿度数据、气压数据、降水数据、气象灾害数据中的至少一种。
8、作为一种可选的实施方式,在本发明第一方面中,所述根据所述感知数据分析得到所述目标区域内对应目标对象的感知模型,包括:
9、根据类聚算法对对所述感知数据进行分类计算,得到至少一个与所述目标区域内目标对象对应的信息簇群,每一个信息簇群包括多个与对应的目标对象相匹配的感知信息;
10、根据深度神经网络算法对所述信息簇群中的感知信息进行训练计算,得到至少一个所述目标对象对应的感知模型。
11、作为一种可选的实施方式,在本发明第一方面中,所述目标区域的地图包括多个地图图层;
12、所述根据所述目标区域的地图与所述目标区域内对应目标对象的感知模型融合,生成至少一个感知结果,包括:
13、根据所述目标区域的地图中每一个地图图层以及与所述地图图层相匹配的所述目标区域内对应目标对象的感知模型融合,生成至少一个所述目标对象对应状态参数的感知结果。
14、作为一种可选的实施方式,在本发明第一方面中,所述根据所述目标区域的地图中每一个地图图层以及与所述地图图层相匹配的目标区域内对应目标对象的感知模型融合,生成至少一个感知结果,包括:
15、根据所述目标区域的地图中的行人图层以及与所述行人图层相匹配的所述目标区域内行人的感知模型融合,生成至少一个所述行人对应状态参数的感知结果;和/或,
16、根据所述目标区域的地图中的车辆图层以及与所述车辆图层相匹配的所述目标区域内车辆的感知模型融合,生成至少一个所述车辆对应状态参数的感知结果;和/或,
17、根据所述目标区域的地图中的道路图层以及与所述道路图层相匹配的所述目标区域内道路的感知模型融合,生成至少一个所述道路对应状态参数的感知结果;和/或,
18、根据所述目标区域的地图中的气象图层以及与所述气象图层相匹配的所述目标区域内气象的感知模型融合,生成至少一个所述气象对应状态参数的感知结果;和/或,
19、根据所述目标区域的地图中的控制信号图层以及与所述控制信号图层相匹配的所述目标区域内控制信号的感知模型融合,生成至少一个所述控制信号对应状态参数的感知结果。
20、作为一种可选的实施方式,在本发明第一方面中,所述方法还包括:
21、根据所述行人对应状态参数的感知结果判断所述目标区域内的行人是否均满足人身安全条件;
22、当判断到存在至少一个不满足人身安全条件的行人时,获取所述行人的感知信息,计算所述行人的感知信息与所述行人对应状态参数的感知结果之间的误差数值,并判断所述误差数值是否大于等于预设的误差阈值;
23、当判断到所述误差数值大于等于预设的误差阈值时,向管控人员发送告示信息,以使所述管控人员执行对所述行人的管控操作;和/或,
24、根据所述车辆对应状态参数的感知结果判断所述目标区域内的车辆是否均满足行驶安全条件;
25、当判断到存在至少一辆不满足行驶安全条件的车辆时,获取所述车辆的感知信息,计算所述车辆的感知信息与所述车辆对应状态参数的感知结果之间的误差数值,并判断所述误差数值是否大于等于预设的误差阈值;
26、当判断到所述误差数值大于等于预设的误差阈值时,向管控人员发送告示信息,以使所述管控人员执行对所述车辆的管控操作;和/或,
27、根据所述控制信号对应状态参数的感知结果判断所述目标区域内的控制信号是否均满足交通安全条件;
28、当判断到存在至少一个不满足交通安全条件的控制信号时,获取所述控制信号的感知信息,计算所述控制信号的感知信息与所述控制信号对应状态参数的感知结果之间的误差数值,并判断所述误差数值是否大于等于预设的误差阈值;
29、当判断到所述误差数值大于等于预设的误差阈值时,向管控人员发送告示信息,以使所述管控人员执行对所述控制信号的管控操作。
30、作为一种可选的实施方式,在本发明第一方面中,所述方法还包括:
31、根据所述目标区域内每一个目标对象对应的感知信息与所述目标对象对应的感知模型生成与所述目标对象相匹配的管控策略,所述管控策略。
32、本发明第二方面公开了一种基于车路协同的动态感知装置,所述装置包括:
33、采集模块,用于通过感知前端设备实时采集目标区域内的感知数据,其中,所述感知数据包括行人数据、车辆数据、道路数据、气象数据、控制信号数据中的至少一种;
34、分析模块,用于根据所述感知数据分析得到所述目标区域内对应目标对象的感知模型;
35、融合模块,用于根据所述目标区域的地图与所述目标区域内对应目标对象的感知模型融合,生成至少一个感知结果,所述感知结果用于对所述目标区域的交通状况进行调度管控。
36、作为一种可选的实施方式,在本发明第二方面中,所述感知前端设备包括:车路协同前端设备、交通指示前端设备、公安交管前端设备中的至少一种;
37、其中,所述车路协同前端设备包括:rsu设备、雷达设备、摄像设备、气象监测设备中的至少一种,所述交通指示前端设备包括:交通照明设备、交通标识设备、交通信号控制设备、传感设备中的至少一种,所述公安交管前端设备包括警示信号控制装置、电警卡口装置中的至少一种;
38、所述行人数据包括:历史时段内所述目标区域的行人的总数量、行人的分布密度、行人的身份标识、行人的地理位置、行人的移动轨迹中的至少一种,所述车辆数据包括:历史时段内所述目标区域的车辆的总数量、车辆的行驶速度、车辆的行驶轨迹、车辆的分布密度,车辆的车辆标识、车辆的车辆类型中的至少一种,所述道路数据包括:历史时段内所述目标区域的道路的地理位置、道路的标识参数、道路的环境参数中的至少一种,所述控制信号数据包括:历史时段内所述目标区域的道路交通信号数据、道路警示信号数据中的至少一种,所述气象数据包括:历史时段内所述目标区域的气温数据、湿度数据、气压数据、降水数据、气象灾害数据中的至少一种。
39、作为一种可选的实施方式,在本发明第二方面中,所述分析模块根据所述感知数据分析得到所述目标区域内对应目标对象的感知模型的具体方式为:
40、根据类聚算法对对所述感知数据进行分类计算,得到至少一个与所述目标区域内目标对象对应的信息簇群,每一个信息簇群包括多个与对应的目标对象相匹配的感知信息;
41、根据深度神经网络算法对所述信息簇群中的感知信息进行训练计算,得到至少一个所述目标对象对应的感知模型。
42、作为一种可选的实施方式,在本发明第二方面中,所述目标区域的地图包括多个地图图层;
43、所述融合模块根据所述目标区域的地图与所述目标区域内对应目标对象的感知模型融合,生成至少一个感知结果的具体方式为:
44、根据所述目标区域的地图中每一个地图图层以及与所述地图图层相匹配的所述目标区域内对应目标对象的感知模型融合,生成至少一个与所述目标对象对应的感知结果。
45、作为一种可选的实施方式,在本发明第二方面中,所述融合模块根据所述目标区域的地图中每一个地图图层以及与所述地图图层相匹配的目标区域内对应目标对象的感知模型融合,生成至少一个与所述目标对象对应的感知结果的具体方式为:
46、根据所述目标区域的地图中的行人图层以及与所述行人图层相匹配的所述目标区域内行人的感知模型融合,生成至少一个所述行人对应状态参数的感知结果;和/或,
47、根据所述目标区域的地图中的车辆图层以及与所述车辆图层相匹配的所述目标区域内车辆的感知模型融合,生成至少一个所述车辆对应状态参数的感知结果;和/或,
48、根据所述目标区域的地图中的道路图层以及与所述道路图层相匹配的所述目标区域内道路的感知模型融合,生成至少一个所述道路对应状态参数的感知结果;和/或,
49、根据所述目标区域的地图中的气象图层以及与所述气象图层相匹配的所述目标区域内气象的感知模型融合,生成至少一个所述气象对应状态参数的感知结果;和/或,
50、根据所述目标区域的地图中的控制信号图层以及与所述控制信号图层相匹配的所述目标区域内控制信号的感知模型融合,生成至少一个所述控制信号对应状态参数的感知结果。
51、作为一种可选的实施方式,在本发明第二方面中,所述装置还包括:
52、判断模块,用于根据所述融合模块融合得到的所述行人对应状态参数的感知结果判断所述目标区域内的行人是否均满足人身安全条件;
53、获取模块,用于当所述判断模块判断到存在至少一个不满足人身安全条件的行人时,获取所述行人的感知信息;
54、计算模块,用于计算所述获取模块获取的所述行人的感知信息与所述行人对应状态参数的感知结果之间的误差数值;
55、所述判断模块,还用于判断所述计算模块计算出的所述误差数值是否大于等于预设的误差阈值;
56、发送模块,用于当所述判断模块判断到所述误差数值大于等于预设的误差阈值时,向管控人员发送告示信息,以使所述管控人员执行对所述行人的管控操作;和/或,
57、所述判断模块,还用于根据所述融合模块融合得到的所述车辆对应状态参数的感知结果判断所述目标区域内的车辆是否均满足行驶安全条件;
58、所述获取模块,还用于当所述判断模块判断到存在至少一辆不满足行驶安全条件的车辆时,获取所述车辆的感知信息;
59、所述计算模块,还用于计算所述获取模块获取的所述车辆的感知信息与所述车辆对应状态参数的感知结果之间的误差数值;
60、所述判断模块,还用于判断所述计算模块计算出的所述误差数值是否大于等于预设的误差阈值;
61、所述发送模块,还用于当所述判断模块判断到所述误差数值大于等于预设的误差阈值时,向管控人员发送告示信息,以使所述管控人员执行对所述车辆的管控操作;和/或,
62、所述判断模块,还用于根据所述融合模块融合得到所述控制信号对应状态参数的感知结果判断所述目标区域内的控制信号是否均满足交通安全条件;
63、所述获取模块,还用于当所述判断模块判断到存在至少一个不满足交通安全条件的控制信号时,获取所述控制信号的感知信息;
64、所述计算模块,还用于计算所述获取模块获取的所述控制信号的感知信息与所述控制信号对应状态参数的感知结果之间的误差数值;
65、所述判断模块,还用于判断所述计算模块计算出的所述误差数值是否大于等于预设的误差阈值;
66、所述发送模块,还用于当所述判断模块判断到所述误差数值大于等于预设的误差阈值时,向管控人员发送告示信息,以使所述管控人员执行对所述控制信号的管控操作。
67、作为一种可选的实施方式,在本发明第二方面中,所述装置还包括:
68、生成模块,用于根据所述获取模块获取的目标区域内每一个目标对象对应的感知信息与所述融合模块融合得到的所述目标对象对应的感知模型生成与所述目标对象相匹配的管控策略,所述管控策略用于当所述目标对象不满足对应的安全条件时对所述目标对象进行管控操作。
69、本发明第三方面公开了另一种基于车路协同的动态感知装置,所述装置包括:
70、存储有可执行程序代码的存储器;
71、与所述存储器耦合的处理器;
72、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的基于车路协同的动态感知方法。
73、本发明第四方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的基于车路协同的动态感知方法。
74、与现有技术相比,本发明实施例具有以下有益效果:
75、本发明实施例中,提供了一种基于车路协同的动态感知方法及装置,该方法包括:通过感知前端设备实时采集目标区域内的感知数据,其中,感知数据包括行人数据、车辆数据、道路数据、气象数据、控制信号数据中的至少一种,根据感知数据分析得到目标区域内对应目标对象的感知模型,并根据目标区域的地图图层与目标区域内对应目标对象的感知模型融合,生成至少一个感知结果,感知结果用于对目标区域的交通状况进行调度管控。可见,实施本发明能够通过多种感知前端设备实时采集目标区域内的感知数据,其中,感知数据包括行人数据、车辆数据、道路数据、气象数据、控制信号数据中的至少一种,降低道路交通信息的采集难度的同时,有利于提高了道路交通的感知数据获取的效率;根据感知数据分析得到目标区域内对应目标对象的感知模型,并根据目标区域的地图图层与目标区域内对应目标对象的感知模型融合,生成至少一个感知结果,通过融合可视化的地图图层与量化的感知模型生成数字化的感知结果,提高了道对路交通的感知数据分析的准确率,以及生成的感知结果有利于提高对目标区域的交通状况进行调度管控的效率与可靠性。
- 还没有人留言评论。精彩留言会获得点赞!