一种面向网联自动驾驶的车队长度控制方法及系统
本发明涉及自动驾驶,尤其是涉及一种面向网联自动驾驶的车队长度控制方法及系统。
背景技术:
1、网联自动驾驶车辆(connected-automated vehicle,cav)的落地应用,催生了由人类驾驶车辆和不同等级网联自动驾驶车辆组成的新型混合交通流。快速路合流区一直是交通拥堵的重灾区,也是cav技术最先落地应用的重要场景。cavs对于合流区的通行能力影响具有两面性,一方面,cavs可以通过车车协同编队提升主线通行能力;另一方面,过长的cavs编队会阻碍匝道车辆汇入主线,当匝道交通量较大时,这种阻碍的负效应更为明显,会导致合流后的通行能力下降,不利于进行网联自动驾驶车队的管控。
2、目前市面上的车队管理大多采用被动方式,还存在以下缺陷:
3、1)缺乏针对网联自动驾驶车队对交通状态的影响量化,从而难以保证车队对交通带来正面增益,甚至产生系列的负面影响;
4、2)缺乏面向自动驾驶车队的交通管理方法和技术,导致交通管控不精准、管控能力瓶颈难以突破。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种面向网联自动驾驶的车队长度控制方法及系统,能够根据实时交通状态,主动控制上游网联自动驾驶车队的长度,实现合流区通行能力最大化。
2、本发明的目的可以通过以下技术方案来实现:一种面向网联自动驾驶的车队长度控制方法,包括以下步骤:
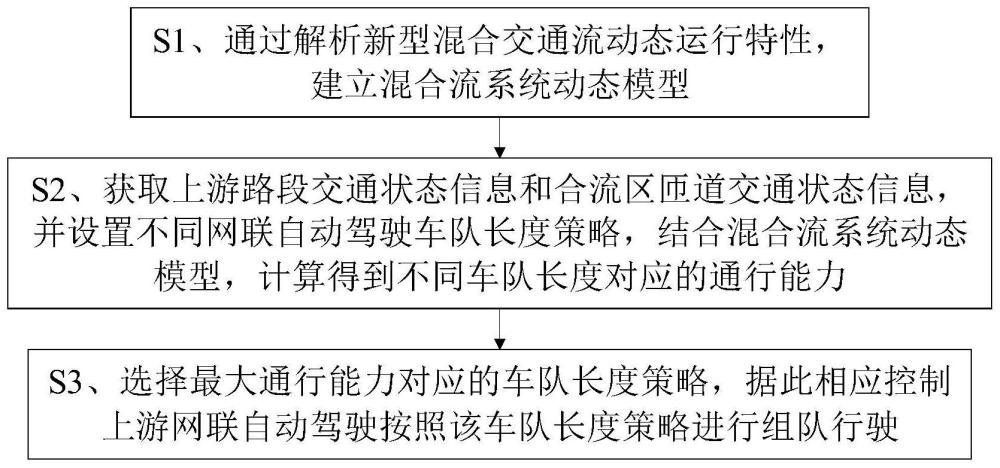
3、s1、通过解析新型混合交通流动态运行特性,建立混合流系统动态模型;
4、s2、获取上游路段交通状态信息和合流区匝道交通状态信息,并设置不同网联自动驾驶车队长度策略,结合混合流系统动态模型,计算得到不同车队长度对应的通行能力;
5、s3、选择最大通行能力对应的车队长度策略,据此相应控制上游网联自动驾驶按照该车队长度策略进行组队行驶。
6、进一步地,所述步骤s1具体包括以下步骤:
7、s11、明确混有cacc(cooperative adaptive cruise control,协同自适应巡航控制)的交通流渗透率(penetration rate,pr)和编队长度这两个特征间的耦合关系;
8、s12、对合流区cav交通正面影响建模,分析当由于编队具备更小的车头时距,对基本图参数变化的影响;
9、s13、对合流区cav交通综合影响建模,增加主线外侧车道旅行时间和引发额外的换道增加时间占有率会导致容量下降,通过定义幽灵密度,以折减合流区通行能力。
10、进一步地,所述步骤s11中,cav的pr与编队长度之间的耦合关系符合二项指数模型:
11、
12、其中,σ为cav渗透率,nm为最大编队长度规模,由cav配备的cacc控制器预先设定,当道路接近通行能力时,实际编队长度主要与cav的pr有关,当pr较高时,cav更有可能形成排,因此,实际的排长度由pr估算,cav的编队长度与pr的拟合曲线服从二项指数模型,给定cav的pr,即可计算得到对应的有效排长度。
13、进一步地,所述步骤s12具体包括以下步骤:
14、s121、给定合流区cav的有效渗透率和有效编队长度,hv(hybrid vehicle,混合动力汽车)作为跟随者的比例为:phf=(1-σe)[(1-σe)+σe]=1-σe,σe为cav有效渗透率;
15、s122、离散cav为跟随者的比例是为cav有效渗透率对应的有效排长度;
16、s123、cacc编队中cav为跟随者的比例为
17、s124、计算新型混合交通流的最小平均车头时距为:
18、
19、其中,是hv跟随其他车辆的最小车头时距,单位是seconds;是离散的cav跟随其他车辆的最小车头时距,单位是seconds;是cacc编队中cav的最小车头时距,单位是seconds;
20、s125、新型混合交通流条件下的道路容量为:
21、
22、其中,纯hv交通流下的道路容量为
23、s126、cav增益被定义为描述编队强度对容量的增加率,它代表每增加一辆cav获取的临界流量的平均增益,
24、合流后的cav增益为:
25、
26、其中,ε为cav增益,c为纯hvs条件下的道路容量,为混有网联自动驾驶条件下的道路容量;
27、s127、得到新型混合交通流基本图为:
28、
29、
30、
31、其中,为新型混合交通流的临界密度,vf为自由流速度,为波速,ρjam为阻塞密度,ρc为人类驾驶交通的临界密度;
32、混有cacc编队车辆的基本图在相同的自由流速度下,容量和临界密度增加,相应的波速也增加了。
33、进一步地,所述步骤s13具体包括以下步骤:
34、s131、计算合流交通对主线外车道的有效旅行时间增加;
35、s132、计算合匝道汇入流量引发主线交通额外换道占用的时间增加。
36、进一步地,所述步骤s131的具体过程为:
37、考虑到驾驶员的反应时间和主线交通与匝道交通之间的速度差异,合流交通产生的空间空隙为:
38、
39、当匝道车流汇入主线时,假定以与主线车流相同的速度行驶,则行驶时间的增加为:
40、
41、定义汇入比率:αg=ng/n,用于描述快速路主线和匝道司机在进入几乎拥挤的合并时如何轮流使用空间,则合流交通对主线外车道的有效旅行时间增加为:
42、
43、其中,vl为主线交通平均速度,vr为匝道交通平均速度,τ为司机的平均反应时间,ng为时间段内的匝道汇入车辆数量,n为主线车辆数量,pg为匝道车辆可接受间隙的出现概率。
44、进一步地,所述步骤s132的具体过程为:
45、合流区中的换道(lane change,lc)量由下式计算:
46、
47、其中,m为主线车道数,t为观测时间间隔;
48、lc导致的额外时间占用,通过平均换道持续时间进行估算:
49、
50、其中,tlc为平均换道时间;
51、之后定义幽灵密度以折减合流区通行能力,其中,幽灵密度用于解释增加主线外侧车道旅行时间和引发额外的换道增加时间占有率,会导致容量下降。
52、进一步地,所述定义幽灵密度以折减合流区通行能力的具体过程为:
53、幽灵密度定义为描述由匝道汇入交通引起的车辆时空域的占用率增加,时空域的平均密度是车辆旅行时间除以统计区域的面积:
54、
55、结合合流交通对主线外车道的有效旅行时间增加和匝道汇入流量引发主线交通额外换道占用的时间,定义式为幽灵车辆旅行时间除以统计区域的面积:
56、
57、因此,合并流量对主线流量的影响是通过时间占用来量化的;
58、定义密度变化强度来描述合流前后的密度变化率:
59、
60、合流后的幽灵临界密度为:
61、
62、基于混有cacc车辆的基本图,合流后的通行能力为:
63、
64、合流后的净cav增益为:
65、
66、合流后混有网联自动驾驶交通的通行能力表示为:其中,tj为车辆j行驶时间,l为合流区长度,ηt为时间段[0,t]内由于换道导致的额外时间占用。
67、进一步地,所述步骤s3具体是通过前馈控制方式进行网联自动驾驶车队长度控制。
68、一种面向网联自动驾驶的车队长度控制系统,包括:
69、交通状态信息获取模块,用于获取合流区上游交通状态,包括流量、密度、网联自动驾驶车辆渗透率、车头时距;
70、通行能力计算模块,基于设置的混合流系统动态模型,用于计算不同车队长度策略下的通行能力
71、车队管理模块,用于选取通行能力最大对应的车队长度策略,对应控制网联自动驾驶车辆形成编队。
72、与现有技术相比,本发明具有以下优点:
73、一、本发明通过解析新型混合交通流动态运行特性,建立混合流系统动态模型,用于计算不同车队长度策略下对应的通行能力,通过选择最大通行能力对应的车队长度策略,据此控制上游网联自动驾驶按照该车队长度进行组队行驶,以实现车队长度的动态控制。由此能够根据实时交通状态,主动控制上游网联自动驾驶车队的长度,实现合流区通行能力最大化,有利于提升交通管控精准性。
74、二、本发明在建立混合流系统动态模型时,首先明确混有cacc的交通流渗透率和编队长度这两个特征间的耦合关系,再对合流区cav交通正面影响建模,分析当由于编队具备更小的车头时距,对基本图参数变化的影响;对合流区cav交通综合影响建模,增加主线外侧车道旅行时间和引发额外的换道增加时间占有率会导致容量下降,并定义幽灵密度来解释本质,折减合流区通行能力。由此通过对新型混合交通流快速路合流区通行能力建模,能够量化网联自动驾驶车队长度、渗透率对合流区通行能力的影响,从而据此进行精准的动态车队长度控制。
75、三、本发明在获取上游路段交通状态信息和合流区匝道交通状态信息后,先设置不同网联自动驾驶车队长度策略,再结合混合流系统动态模型,以计算得到不同车队长度对应的通行能力,通过筛选最大通行能力反算出智能网联车队长度,实现对道路车辆流量预测、计算出道路容量,从而大大提高网联自动驾驶的车队道路通行效率。
- 还没有人留言评论。精彩留言会获得点赞!