一种超长超宽车辆转弯算法研究
本发明涉及位置服务的路径规划与导航,尤其涉及一种超长超宽车辆转弯算法研究。
背景技术:
1、随着我国北斗等卫星导航系统的逐步成熟与应用的推广,基于lbs的定位导航提升了日常出游的便捷度,也激发了更多出行定位导航的需求,进一步刺激了私家车的导航需求。市场广泛认同的诸如百度地图,高德地图已经成为日常出行的门户,培养了大众定位导航的用户习惯。然而,汽车保有量的逐年增加和导航需求的快速增长,导致道路紧张度也随之增加。更为重要的是,主流定位导航软件多注重于私家小汽车出行服务,对于超长超宽车辆的精细转弯算法研究却很少,加剧了道路车辆的拥堵等的问题。
技术实现思路
1、本发明的目的在于提供一种超长超宽车辆转弯算法研究,以解决现有的的问题。
2、为实现上述目的,本发明采用了如下技术方案:一种超长超宽车辆转弯算法研究,
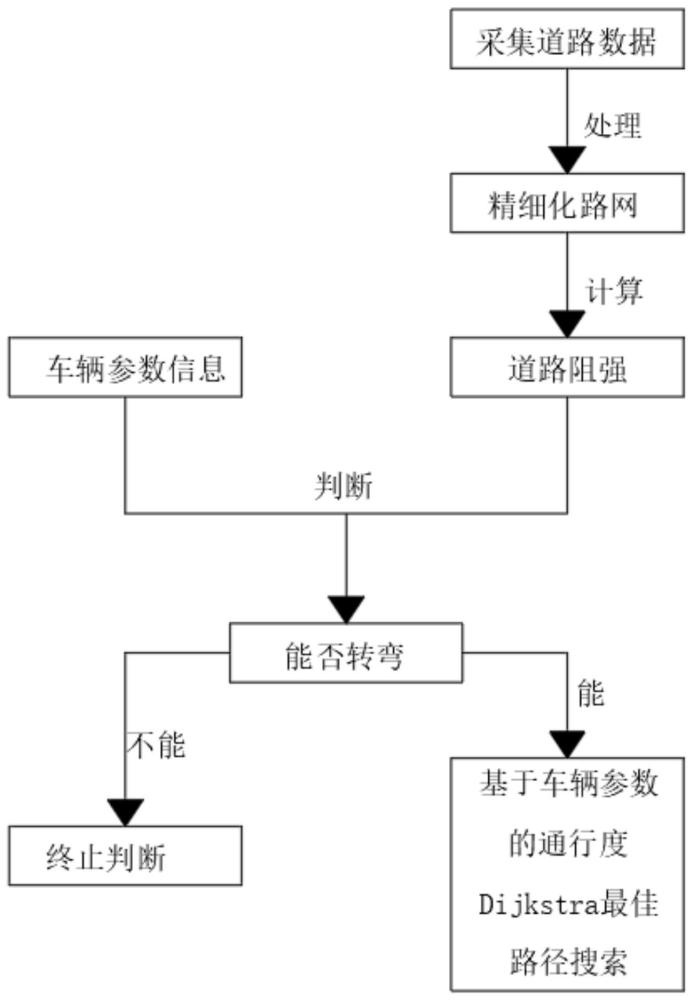
3、包括采集道路数据,对道路数据进行处理,并获取精细化路网;
4、计算在精细化路网上车辆的道路阻强,并判断车辆在精细化路网能否顺利转弯;
5、对计算得到的阻强进行最佳路径分析,获得车辆行驶的最佳路径。
6、优选的,所述对道路数据处理包括利用所述道路数据,将其绘制的数据转化为arcmap中的一个图层,将所述图层中的道路数据导出转为shapefile格式矢量数据,获得道路多边形数据,将获得的多边形数据单独转换到投影坐标系,使用几何计算器计算每个多边形的周长和面积,使用字段计算器按照公式估算每一个道路的宽度;计算公式如下:
7、width=area/length
8、(width为道路多边形宽度;area为多边形面积;length为对应道路长度)。
9、优选的,所述投影坐标系中的多边形数据按照位置选中相应的道路长度为线数据,将所述线数据赋上道路宽度属性,同时对非直线的道路数据赋上特别属性,用以区分直道与弯道。
10、优选的,将所述道路多边形数据进行人工精细化路网处理,获得线路相通且合理的中心线数据与边路路网数据,
11、将边路路网数据和中心线数据进行线段打断,保证一条线路由起始点和终止点构成,为所有的点对象赋上一个坐标属性,获得点数据文件。
12、优选的,多边形数据导出成线数据,并打断折线,得到每一小段线段对应左右两个端点的线数据,线数据导出成节点,节点会带有原先线的id属性。
13、优选的,利用所述车辆的参数信息,将车辆简化为依据车辆长宽参数的一个外包围矩形,通过判断车辆宽度与道路宽度的大小,以及判断道路边界点或道路边界线是否包含在车辆的矩形,若是包含,则认为道路宽度不足以支持车辆的转弯;若不包含,则认为车辆可以通过。
14、优选的,通过车辆宽度与道路宽度,初步筛选行驶道路下的道路权重的计算方式:
15、
16、其中c为车辆宽度,是由输入的车辆长宽参数所决定的,r为道路宽度,由采集路网数据处理计算后所得到,l为道路长度。
17、优选的,车辆在所述道路边界点或道路边界线的可视化判断包括如下步骤,
18、步骤s1:选取精细化路网中任一弯曲道路的一侧;
19、步骤s2:精细化路网的该侧由许多个折线组成,每一对折线组成一个基本的弯曲单元,标出相邻折线的三个端点,分别为p1、p2、p3,其中p2为折线的转折点;
20、步骤s3:并标出车辆的前、后点,利用p1、p2的坐标使用两点式计算一条直线,在直线上找到p2到p1方向上,距离p2点长度为车辆长度的点,这个点便为车辆的后点,而p2点也成为了车辆的前点;
21、步骤s4:随后车辆后点沿着p1、p2方向移动,前点沿着p2、p3方向移动,移动的同时需要保证前点后点的距离始终保持为车长,因此使用车辆后点在p1p2上的移动距离,在p2p3方向上计算车辆的前点,由车辆的前点和后点就可以用两点式计算一条直线;
22、步骤s5:在车辆的前点后点上,作该直线的法线,法线方向为道路内陷边方向,找到两条法线方向上分别与前后点距离为车辆宽度的两个点,将这两个点与车辆前后点连接,便可得到车辆的多边形;
23、步骤s6:车辆通过拐弯道路的初始情况就是车辆紧贴着其中的道路突出边,随后车辆的前后点分别在道路突出边两条折线上通过,直到车辆的边紧贴着另一条道路突出边,由此车辆完全通过该条弯曲道路,在车辆行驶的迭代过程中,也就是遍历折线路段的所有折线单元中;若车辆的多边形与道路内陷边相交,则终止判断,直接认为该条路不适合车辆的行驶;若车辆后点移动到车辆前点都没有产生交集,则认为可以通过。
24、优选的,判断车辆在转弯路口行驶过程中轨迹算法代码如下:
25、
26、
27、与现有技术相比,本发明的有益效果是:
28、本发明通过超长超宽转弯车辆算法能提高大型车辆出行效率,减少安全隐患,使未来的货运,物流等行业更加高效化、智能化。
29、本发明通过准确的计算得到路网阻强作为道路通行成本,计算最优路径,能够以较快的速度实现最优路径的分析,并生成的最短路径能够符合现实情况的要求,能够较好的为用户提供服务。
技术特征:
1.一种超长超宽车辆转弯算法研究,其特征在于,
2.根据权利要求1所述的一种超长超宽车辆转弯算法研究,其特征在于:所述对道路数据处理包括利用所述道路数据,将其绘制的数据转化为arcmap中的一个图层,将所述图层中的道路数据导出转为shapefile格式矢量数据,获得道路多边形数据,将获得的多边形数据单独转换到投影坐标系,使用几何计算器计算每个多边形的周长和面积,使用字段计算器按照公式估算每一个道路的宽度;计算公式如下:
3.根据权利要求2所述的一种超长超宽车辆转弯算法研究,其特征在于:
4.根据权利要求2所述的一种超长超宽车辆转弯算法研究,其特征在于:
5.根据权利要求4所述的一种超长超宽车辆转弯算法研究,其特征在于:
6.根据权利要求5所述的一种超长超宽车辆转弯算法研究,其特征在于:利用所述车辆的参数信息,将车辆简化为依据车辆长宽参数的一个外包围矩形,通过判断车辆宽度与道路宽度的大小,以及判断道路边界点或道路边界线是否包含在车辆的矩形,若是包含,则认为道路宽度不足以支持车辆的转弯;若不包含,则认为车辆可以通过。
7.根据权利要求6所述的一种超长超宽车辆转弯算法研究,其特征在于:通过车辆宽度与道路宽度,初步筛选行驶道路下的道路权重的计算方式:
8.根据权利要求6所述的一种超长超宽车辆转弯算法研究,其特征在于:车辆在所述道路边界点或道路边界线的可视化判断包括如下步骤,
9.根据权利要求8所述的一种超长超宽车辆转弯算法研究,其特征在于:判断车辆在转弯路口行驶过程中轨迹算法代码如下:
技术总结
本发明公开了一种超长超宽车辆转弯算法研究,算法包括采集道路数据,对道路数据进行处理,并获取精细化路网;计算在精细化路网上车辆的道路阻强,并判断车辆在精细化路网能否顺利转弯;对计算得到的阻强进行最佳路径分析,获得车辆行驶的最佳路径;本发明以解决现有的主流定位导航软件多注重于私家小汽车出行服务,对于超长超宽车辆的精细转弯算法研究却很少,加剧了道路车辆的拥堵等的问题。
技术研发人员:晏实江,周元迪,孔德辉,梁明
受保护的技术使用者:安徽大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!