基于雷达与视频分析融合数据的一种信号灯色实时控制装置的制作方法
本发明涉及信号灯控制设备附属装置的,特别是涉及一种基于雷达与视频分析融合数据的一种信号灯色实时控制装置。
背景技术:
1、目前,传统的单路口自适应信号控制数据均来源于线圈检测器(感应线圈和虚拟线圈),由于线圈检测布设位置的限制,只能采集两类数据,一个是断面实时过车信号,一个是固定时间间隔的集计数据。
2、基于感应线圈的断面实时过车信号的单点自适应控制主要是基于规则的控制逻辑,当放行相位在固定延长率步长内检测到感应线圈有车辆到达时,对当前相位绿灯进行固定步长的延长,如果在固定延长率步长内检测到感应线圈有车辆到达时,未检测到车辆大道信息,则当前放行相位不进行绿灯延长,进入相位果断阶段切换至下一相位;由于受到感应线圈的受到检测器的安装位置的影响,参数设置依赖交通工程师的经验,同时在放行的过程中无法均衡考虑路口各进、出口道的实时交通流状态,实际使用效果仅在小饱和度且上下游影响较小的路口存在一定效果,对上下游路口相互关联比较大、路口饱和度较高的路口,运行效果较差。
3、而基于优化模型的控制逻辑主要基于线圈采集的集计数据,优化模型通过几个固定时间间隔的感应线圈集计数据对未来交通需求进行预测,并按照预测的交通需求按照优化模型对未来一段时间的信号配时各类型参数进行求解,生成短时的信号配时方案;由于优化模型主要依据输入的集计数据,因此对于数据的精确度要求非常高,基于感应线圈的集计数据在天然上数据精度不足,特别是在高饱和状态下,受到安装位置影响,无法准确反映路口交通状态,且对交通需求预测模型和配时方案的优化模型设计要求较高,而在实际应用过程中,由于交通在长时间内存在一定的规律性,但在短时内存在较大的不确定性,导致需求预测存在偏差,最终运行效果不甚理想。
4、目前随着科技发展,各类精准的感知设备建设热度不减,前端交通流感知设备数据感知类型越来越丰富,精度也越来越高。本系统旨在雷达与视频分析融合数据为前提,设计一种基于规则的信号单点自适应控制逻辑,通过更全面、更精准的交通流数据感知能力,实现路口交通需求与信号配时实时匹配,较少路口绿灯控制与拥堵情况的发生。
技术实现思路
1、为解决上述技术问题,本发明提供一种可以通过系统通过集成路口交通雷达采集的出口道溢出、进口道车道排队超限/拥堵数据及车道级实时交通流状态数据对当前路口放行的信号灯色进行实时研判,判断是否进行绿灯保持或者是进行绿灯切换,同时在灯色切换时,依据交通雷达实时采集的交通流数据对下一个运行相位进行选择,以此来摆脱复杂的交通需求预测和信号配时优化模型,降低了模型的负责度,优化了运行方案和交通需求的匹配度,因此提高了设备的工作效率,从而增加了实用性的基于雷达与视频分析融合数据的一种信号灯色实时控制装置。
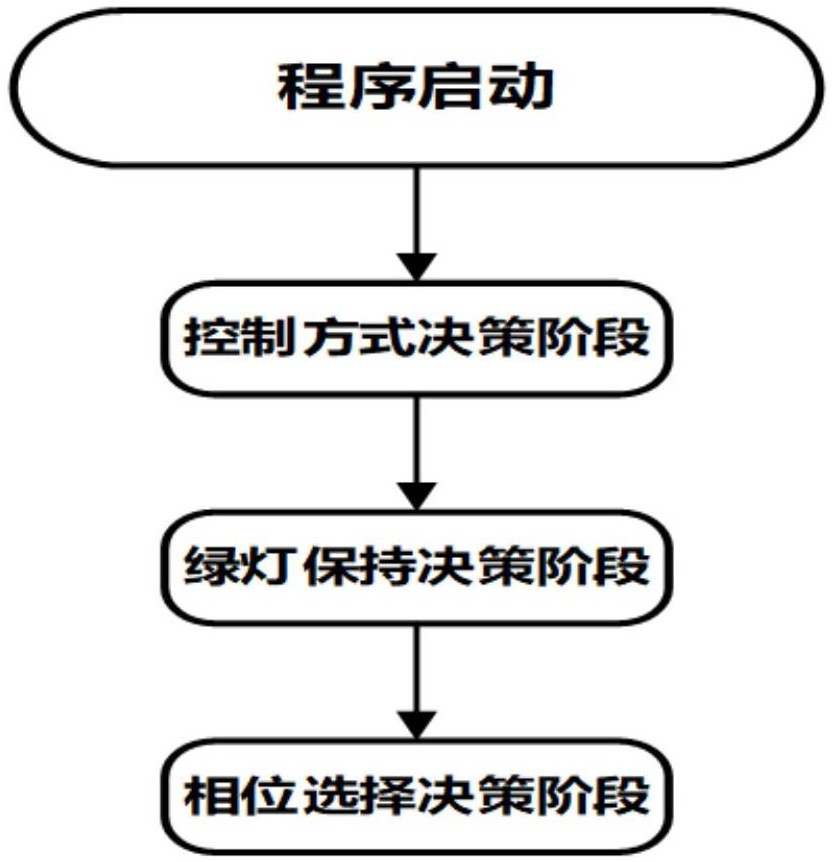
2、本发明的一种基于雷达与视频分析融合数据的一种信号灯色实时控制装置,包括系统通过集成路口交通雷达采集的出口道溢出、进口道车道排队超限/拥堵数据及车道级实时交通流状态数据对当前路口放行的信号灯色进行实时研判,判断是否进行绿灯保持或者是进行绿灯切换,同时在灯色切换时,依据交通雷达实时采集的交通流数据对下一个运行相位进行选择,还包括研判逻辑如下:
3、s1:系统上线后,程序启动执行;
4、s2:程序启动成功,进入信号控制方式决策阶段;
5、s3:进入绿灯保持决策阶段;
6、s4:进入相位选择决策阶段。
7、本发明的一种基于雷达与视频分析融合数据的一种信号灯色实时控制装置,信号控制方式决策阶段还包括:
8、s1:获取当前信号机联机状态,若脱机则state_signal=0,若正常联机,则state_signal=1;
9、s2:获取当前交通雷达联机状态,若脱机则state_radar=0,若正常联机,则state_radar=1;
10、s3:判断当前设备获取的信号运行参数与信号机实际运行参数是否一致,若不一致则para_cons=0,若一致则para_cons=1;
11、s4:判断当前设备与信号机及雷达对时是否一致,获取设备、信号机、雷达当前时钟,若不一致则time_cons=0,若一致则time_cons=1;
12、s5:获取系统配置参数信号优化功能是否启用,若系统信号优化功能已启用,则config_optimize=1,若信号优化功能未启用则config_optimize=0;
13、s6:获取当前信号控制方式signal_control,若当前控制方式为“单点自适应”则signal_control=1,若当前控制方式为“单点感应”则signal_control=2,否则signal_control=0;
14、s7:判断当前系统是否存在故障system_failure=0(初始化为0,0代表无故障,1代表故障),即:如果state_signal=0或者state_radar=0或者para_cons=0或者time_cons=0,则system_failure=1,否则system_failure=0;
15、s8:若system_failure=1即当前系统存在故障,且signal_control=1,则系统发送指令control_command=1(代表“恢复自主控制”指令)至信号机,并退出控制程序,否则系统不执行任何操作;
16、s9:若system_failure=0且config_optimize=1且signal_control=2,则系统发送指令control_command=2(进入“单点自适应”指令)至信号机(当控制方式顺利切换后,系统进入绿波保持决策阶段),若failure=0且config_optimize=0且signal_control=1,则系统继续下一步step3(进入绿波保持决策阶段),否则系统退出当前程序。
17、本发明的一种基于雷达与视频分析融合数据的一种信号灯色实时控制装置,绿灯保持决策阶段还包括:
18、s1:程序实时监控相位递进信息,当接受到相位递进数据且signal_control=1,设置相位执行计时器timer=0(按秒自增)并执行下一步step3-2,否则,程序一致等待;
19、s2:判断当前相位运行阶段,若当前相位运行阶段为绿灯阶段operate_phase=1,否则operate_phase=0;若operate_phase=1,则程序进入绿灯保持决策阶段s3,若operate_phase=0,则进行相位选择决策阶段;
20、s3:判断当前相位设置参数是否为感应,若为感应相位,则config_phase=1,否则config_phase=0;若config_phase=1,则继续进入下一步step3-4,若config_phase=1,则返回step3-1;
21、s4:获取当前运行关联的所有雷达检测器,若至少有一个检测器存在故障,则phase_failure=1,否则phase_failure=0;若phase_failure=0,则继续进入下一步step3-5,若phase_failure=1,则系统发送干预指令control_command=3(相位降级指令)至信号机,并返回step3-1;
22、s5:获取当前相关关联车道,判断若当前相位无关联的机动车道,则设置lane_properties=1,若当前相位有关联的机动车道,则lane_properties=0;
23、s6:获取当前相关关联检测器数据,若检测器有数据,则detector_data1=1,若当前检测器无数据,则detector_data1=0;
24、s7:若lane_properties=1且detector_data1=1,则保持相位绿灯,程序等待,当timer=timer+1,程序返回step3-4;若lane_properties=1且detector_data1=0,此时系统发送指令control_command=4(相位进入过渡)至信号机,并返回至step3-1,若lane_properties=0则继续下一步step3-8;
25、s8:获取当前放行相位关联检测器的溢出事件数据,若至少一个检测器存在溢出事件则lane_overflow=1,否则lane_overflow=0;
26、s9:若lane_overflow=1且timer≥green_min(设置的最小绿),此时系统发送指令control_command=4(相位进入过渡)至信号机,并返回至step3-1;若lane_overflow=1且timer<green_min,程序等待,当timer=timer+1,程序返回step3-4;若lane_overflow=0且timer<green_min,程序等待,当timer=timer+1,程序返回step3-4;若lane_overflow=0且timer≥green_min,进入下一步step3-10;
27、s10:获取当前相位倒计时设置参数countdown,若存在倒计时参数,则countdown=to(to为设置的倒计时时长,且to等于0),否则countdown=0;当countdown=to,进入下一步step3-11至step3-21,当countdown=0,则进入step3-22至step3-31;
28、s11:获取当前灯组状态,判断是否处于倒计时状态,若当前处于倒计时状态,则state_countdown=1,若当前未处于倒计时状态,则state_countdown=0;若state_countdown=1,并返回至step3-1,若state_countdown=0则继续下一步step3-12;
29、s12:获取当前放行相位最大绿设置green_max,判断当前相位运行时间与最大绿及倒计时时长的关系,若timer≥green_max-countdown,此时系统发送指令control_command=5(相位进入倒计时)至信号机,并返回至step3-1;否则进入下一步step3-13;
30、s13:获取当前相位关联的雷达检测器,判断当前相位关联的检测器是否存在静态排队车辆数数据,若存在静态排队车辆数,则static_queue=1,若不存在排队车辆数则static_queue=0;当static_queue=1,则继续下一步step3-14至step3-15,当static_queue=0则继续step3-16至step3-21;
31、s14:获取路口车口到检测关联检测器排队超限/拥堵事件,若存在排队超限/拥堵事件则congestion_vents1=1,若不存在排队超限/拥堵事件则congestion_vents1=0;当congestion_vents1=1则信号灯继续保持绿灯,程序返还至step3-4,若congestion_vents1=0,则继续下一步step3-15;
32、s15:获取当前未放行相关关联检测器排队超限/拥堵事件,若存在排队超限/拥堵事件则congestion_vents2=1,若不存在排队超限/拥堵事件则congestion_vents2=0;当congestion_vents2=0则信号灯继续保持绿灯,程序返还至step3-4,若congestion_vents2=1,此时系统发送指令control_command=5(相位进入倒计时)至信号机,并返回至step3-1;
33、s16:获取当前未放行相关关联检测器排队超限/拥堵事件,若存在排队超限/拥堵事件则congestion_vents2=1,若不存在排队超限/拥堵事件则congestion_vents2=0;当congestion_vents2=0则信号灯继续保持绿灯,程序返还至step3-4,若congestion_vents2=1,则继续下一步step3-17;
34、s17:获取当前相位关联的雷达检测器,判断当前相位关联的检测器是否存在动态排队车辆数数据,若存在动态排队车辆数,则dynamics_queue=1,若不存在则dynamics_queue=0;当dynamics_queue=1,则继续下一步step3-18至step3-19,当static_queue=0则系统发送指令control_command=5(相位进入倒计时)至信号机;
35、s18:获取相位放行的各车道头车速度v1i及头车距离停车线的距离l1i,计算头车到达停车线所选时间
36、s19:判断最小到达停车线所需时间与设置的饱和车头时间h0关系,若t1>h0,control_command=5(相位进入倒计时),否则当前相位继续保持绿灯,程序返回step3-4;
37、s20:获取当前放行相位最大绿设置green_max,判断当前相位运行时间与最大绿的关系,若timer≥green_max,此时系统发送指令control_command=4(相位进入多度)至信号机,并返回至step3-1;否则进入下一步step3-21;
38、s21:获取当前相位关联的雷达检测器,判断当前相位关联的检测器是否存在静态排队车辆数数据,若存在静态排队车辆数,则static_queue=1,若不存在排队车辆数则static_queue=0;当static_queue=1,则继续下一步step3-22至step3-23,当static_queue=0则继续step3-24至step3-37;
39、s22:获取路口车口到检测关联检测器排队超限/拥堵事件,若存在排队超限/拥堵事件则congestion_vents1=1,若不存在排队超限/拥堵事件则congestion_vents1=0;当congestion_vents1=1则信号灯继续保持绿灯,程序返还至step3-4,若congestion_vents1=0,则继续下一步step3-23;
40、s23:获取当前未放行相关关联检测器排队超限/拥堵事件,若存在排队超限/拥堵事件则congestion_vents2=1,若不存在排队超限/拥堵事件则congestion_vents2=0;当congestion_vents2=0则信号灯继续保持绿灯,程序返还至step3-4,若congestion_vents2=1,此时系统发送指令control_command=5(相位进入倒计时)至信号机,并返回至step3-1;
41、s24:获取路口车口到检测关联检测器排队超限/拥堵事件,若存在排队超限/拥堵事件则congestion_vents1=1,若不存在排队超限/拥堵事件则congestion_vents1=0;当congestion_vents1=1则信号灯继续保持绿灯,程序返还至step3-4,若congestion_vents1=0,则继续下一步step3-25;
42、s25:获取当前相位关联的雷达检测器,判断当前相位关联的检测器是否存在动态排队车辆数数据,若存在动态排队车辆数,则dynamics_queue=1,若不存在则dynamics_queue=0;当dynamics_queue=1,则继续下一步step3-26至step3-27,当static_queue=0则系统发生指令control_command=4至信号机;;
43、s26:获取相位放行的各车道动态排队车辆头车速度v1i及排队头车距离停车线的距离l1i,计算头车到达停车线所选时间
44、s27:判断最小到达停车线所需时间与设置的饱和车头时间h0关系,若t1>h0,control_command=4,否则当前相位继续保持绿灯,程序返回step3-4。
45、本发明的一种基于雷达与视频分析融合数据的一种信号灯色实时控制装置,相位选择决策还包括:
46、s1:当相位处于过渡阶段,即operate_phase=0,程序接入相位选择决策阶段;
47、s2:获取当前相位运行及时器timer、当前相位配置的绿闪时长green_flash、、当前相位配置的黄闪时长yellow_flash、当前相位配置的全红时长red_all;
48、s3:判断当前相位运行是否进入最后一秒,即green_flash+yellow_flash+red_all-timer是否大于1,若green_flash+yellow_flash+red_all-timer>1,则程序等待,green_flash+yellow_flash+red_all-timer≤1,则程序进入下一步s4;
49、s4:获取当前执行下一相位的相位倒计时设置countdown,若countdown=0,则继续下一步step4-5,否则系统发送指令control_command=6(选择下一相位)并退出相位选择决策阶段;
50、s5:判断下一相位放行车道是否与当前相位存在重复,若存在重复则overlap_phase=1,若不存在车道重复则overlap_phase=0;若overlap_phase=0,则继续下一步step4-6,否则系统发送指令control_command=6(选择下一相位)并退出相位选择决策阶段;
51、s6:判断当前放行相位的下一相位是否为感应相位,若为感应相位,则config_phase=1,否则config_phase=0;若config_phase=0,则继续进入下一步step4-7,否则系统发送指令control_command=6(选择下一相位)并退出相位选择决策阶段;
52、s7:判断当前放行相位的下一相位是否为可跳相相位,若为可跳相相位,则phase_hopping=1,否则phase_hopping=0;若config_phase=1,则继续进入下一步step4-8,否则系统发送指令control_command=6(选择下一相位)并退出相位选择决策阶段;
53、s8:判断当前放行相位的下一相位检测器联机状态,若脱机则state_radar=0,若正常联机,则state_radar=1;若state_radar=1,则继续进入下一步step4-8,否则系统发送指令control_command=6(选择下一相位)并退出相位选择决策阶段;
54、s9:判断当前放行相位的下一相位检测器是否存在数据,若检测器有数据,则detector_data1=1,若当前检测器无数据,则detector_data1=0;若detector_data1=1,否则系统发送指令control_command=6(选择下一相位)并退出相位选择决策阶段,否则系统发送指令control_command=7(下一相位跳相)并退出相位选择决策阶段。
55、本发明的一种基于雷达与视频分析融合数据的一种信号灯色实时控制装置,具体研判逻辑的实施方式还包括:
56、s1:系统通过集成路口交通雷达采集的出口道溢出、进口道车道排队超限/拥堵数据及车道级实时交通流状态数据对当前路口放行的信号灯色进行实时研判;
57、s2:判断是否进行绿灯保持或者是进行绿灯切换;
58、s3:同时在灯色切换时,依据交通雷达实时采集的交通流数据对下一个运行相位进行选择。
59、与现有技术相比本发明的有益效果为:数据类型各丰富,可对路口全要素进行精准识别,控制精度更高;在低饱和情况下,可极大的减少绿灯空放;在高饱和(拥堵)情况下,可兼顾整个路口交通流状态,通过绿灯缩短等措施进行拥堵消散;信号灯色按秒调整,响应速度更快;高度智能化的控制系统,参数不需要专业人员进行调试,减少人员投入。
- 还没有人留言评论。精彩留言会获得点赞!