一种无信号交叉路口车辆引导通行系统和方法与流程
本发明涉及道路交通引导领域,具体涉及一种无信号交叉路口车辆引导通行系统和方法。
背景技术:
1、近年来,国内车辆数量爆发式增长,导致交通拥挤,并且一些司机驾驶过程中疏于观察,不按照交通规则行驶等原因,造成通行混乱,尤其是在没有信号灯的交叉路口,常有堵车或交通事故发生。根据相关统计数据显示,我国无信号交叉路口发生交通事故的占交叉路口交通事故总数的35%,在北京,比例甚至高达51%。由于交叉路口没有信号灯的引导,车辆和行人的出行存在很大的安全隐患。
2、智能驾驶技术是近几年最炙热的研究领域之一,虽然发展迅速,其能解决单车行驶问题,在车道识别、路劲规划等方面取得可观成就,但是缺乏车与车、车与路之间的协同,没有统筹支撑,这会导致在车流量比较大的情况下,很难实现路面上多车辆的整体行驶规划,达到高效安全通行的目的。车路协同、车车协同技术的发展提升,势必会解决车辆拥堵、通行低效等问题。
3、随着通信技术和芯片存储运算能力提升,尤其是5g技术工业应用以来,大量数据实时稳定无丢包通讯成为现实,这为本发明车侧和路侧设备之间的实时通讯提供了支撑。而且芯片的高性能为路侧设备单元的计算能力提供了有力的保障,大幅提升数据解析与计算速度。路侧设备的核心计算单元能够实时处理大规模化数据,实现算法指令,并将结果下发至各车辆,引导车辆行驶。智能算法对车辆的引导能够提升通行效率,避免拥堵情况,营造安全畅通的交通环境。
4、现有技术中,例如已公开cn113538932a本发明提出一种车路协同环境下的无信号交叉路口资源调度方法,主要方法为智能路侧单元根据接收到车辆的状态信息,根据已建立的无信号交叉路口资源调度模型计算出各个进口车道的车流量、排队长度,计算出最优车辆通行序列;智能路侧单元将最优车辆通行序列实时发送至自治车辆;自治车辆按照智能路侧单元的指示,按照当前最优同行序列,依次通过交叉路口。但是该模型复杂,在实际路况使用情况下,缺乏智能算法的普适性。
5、例如已公开专利cn111583673a本发明涉及一种基于无人驾驶车辆的智能交叉路口管理方法,主要是根据车辆的行驶信息,及其到达交又路口的时间计算优先级,通过车辆信息计算交又路口资源被占用时间,检测潜在的碰撞,调整车速。主要是采用fcfs(先到先服务)规则为其确定优先级。或例如已公开专利cn116434583a本发明公开了一种基于无人车的交叉路口安全通行方法与路径规划系统。车辆在即将到达无信号灯交叉路口的时,车辆相关信息包括位置、速度、加速度、车辆尺寸等发送至路侧的控制中心,控制中心将根据车辆达到交叉路口的时间为车辆确定优先级,然后依据优先级顺序检测碰撞、调整车辆速度。但专利cn111583673a和专利cn116434583a均是依据先到先服务(fcfs)的策略确定车辆的通行顺序,这种处理方式是根据车辆到达交叉路口的时间确定通行顺序,没有统筹考虑更多的复杂情况,尤其是在车辆较多情况下,其通行效率相对较低。
技术实现思路
1、根据背景技术提出的问题,本发明提供一种无信号交叉路口车辆引导通行系统和方法来解决,实现车辆在无信号交叉路口高效通行。本发明是在路侧单元(rsu)和车载单元(obu)之间实时交互通信的基础上完成,在获取车辆速度、位置、航向以及目标路径等信息后,通过蒙特卡洛树搜索算法确定车辆最优通行顺序,如果检测有碰撞发生,则通行顺序靠后的车辆应该降速避让行驶,并将速度信息结果下发至车端obu,引导车辆通行。接下来对本发明做进一步地阐述。
2、一种无信号交叉路口车辆引导通行系统,包括数据数据采集模块、数据处理模块、智能优化模块和车辆引导模块,其中:
3、所述数据采集模块,通过路侧单元rsu实时获取控制区内车辆obu的数据信息;
4、所述数据处理模块,对获取数据进行解析处理,获取所需的信息数据;
5、所述智能优化模块,用于获取数据处理之后的数据,通过启发式蒙特卡洛搜索树算法寻求最佳的通行顺序;
6、所述车辆引导模块,用于将智能优化模块的输出,即每个车辆某个时间点对应的行驶速度,发送至相对应车辆的obu设备,并发出碰撞预警。
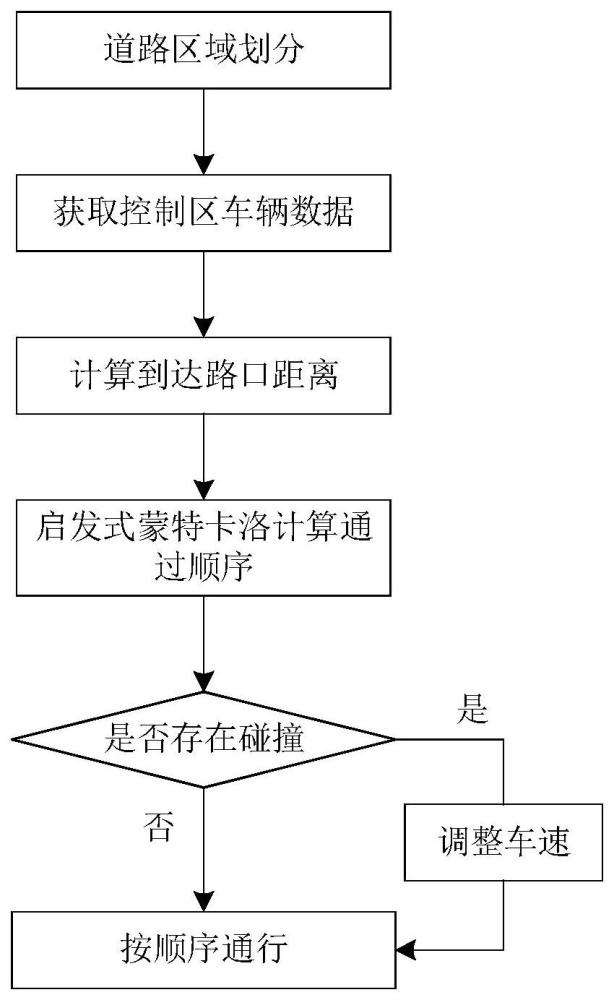
7、一种无信号交叉路口车辆引导通行方法,包括以下步骤:
8、s1,道路区域划分,交叉路口在一定距离内扩展范围内的路段作为控制区;
9、s2,获取控制区内车辆数据,车辆进入控制区后获取车辆obu的数据,通过数据处理模块获取车辆的编号、速度、位置坐标、以及行驶路径信息;
10、s3,计算各车至交叉路口的距离;
11、s4,计算车辆的通过顺序,采用启发式蒙特卡洛树搜索算法,寻求车辆的最优通过顺序,若通过交叉路口的车辆有碰撞风险,则通过顺序靠后的车辆需要降速行驶;
12、s5,引导车辆通过,将车辆在某时刻对应的速度传递至车辆obu并作为车辆通行的引导策略。
13、进一步地,所述启发式mcts,主要包括:
14、s401,选择步骤,从根节点开始,选择采用ucb计算得到的最大的值的子节点,如此向下搜索车辆,直到树的底部的叶子节点,等待下一步操作;其中,ucb计算式为:其中,vi是节点估计的值,ni是节点被访问的次数,n是其父节点已经被访问的总次数,c是可调整参数;
15、s402,扩展步骤,搜索到达叶子节点后如果还没有到达终止状态,则对此节点进行扩展,扩展出一个或多个节点,根据启发式策略,从符合条件的车辆列表中选择一辆车辆,并将其作为子节点添加到所选节点,只有车道距离交叉路口最近而未被选择的车辆才能被选中;
16、s403,模拟步骤,从新添加的子节点构建完整的传递顺序,直到所有车辆通行结束为止,并通过成本增强计算该传递顺序的成本;
17、s404,反向传播步骤,根据模拟的结果自底向上,反向更新所有节点的信息。
18、有益效果:与现有技术相比,本发明采用蒙特卡洛树搜索智能算法,采用启发式搜索策略,降低算法的计算复杂度,同时采取成本加强的方式优化模型,提升模型的实用性和最优化。
技术特征:
1.一种无信号交叉路口车辆引导通行系统,其特征在于,包括数据数据采集模块、数据处理模块、智能优化模块和车辆引导模块,其中:
2.一种无信号交叉路口车辆引导通行方法,其特征在于,包括以下步骤:
3.根据权利要求1所述的无信号交叉路口车辆引导通行方法,其特征在于,所述启发式mcts,主要包括:
4.根据权利要求1所述的其特征在于,车辆到交叉路口中心位置的距离采用欧式距离,距离公式为其中,vx、vy为车辆的所处位置的坐标,ox、oy是交叉路口中心的坐标。
5.根据权利要求1所述的无信号交叉路口车辆引导通行方法,其特征在于,步骤s4中车辆碰撞风险的判断方法为:首先对交叉路口车辆通行路径编号,如果某两个路径会发生冲突,则将该编号组合;一旦车辆出现在组合数字所在的路径之上,且车辆之间的距离小于安全阈值,则认为车辆具有碰撞风险,需要降速处理。
技术总结
一种无信号交叉路口车辆引导通行方法,包括以下步骤:S1,道路区域划分,交叉路口在一定距离内扩展范围内的路段作为控制区;S2,获取控制区内车辆数据,车辆进入控制区后获取车辆OBU的数据;S3,计算各车至交叉路口的距离;S4,计算车辆的通过顺序,采用启发式蒙特卡洛树搜索算法,寻求车辆的最优通过顺序,若通过交叉路口的车辆有碰撞风险,则通过顺序靠后的车辆需要降速行驶;S5,引导车辆通过,将车辆某时刻对应的速度传递至车辆OBU并作为车辆通行的引导策略。本发明采用蒙特卡洛树搜索智能算法,采用启发式搜索策略,降低算法的计算复杂度,同时采取成本加强的方式优化模型,提升模型的实用性和最优化。
技术研发人员:何永强,朱芸,陈胜华,刘云鹏,罗明波,王谦,卢文跃
受保护的技术使用者:浙江海康智联科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!