一种基于AR技术的停车管理方法及系统与流程
本发明涉及停车导航,特别涉及一种基于ar技术的停车管理方法及系统。
背景技术:
1、随着城市化进程的加快和车辆数量的不断增多,停车问题成为城市交通管理中的一个重要挑战。传统的停车管理方法存在一些问题,如停车位搜索困难、停车位占用信息不准确等,导致停车效率低下和资源浪费。
2、为了提高停车效率和解决停车管理中的问题,基于增强现实(ar)技术的停车管理方法应运而生。该方法借助计算机视觉、深度学习和传感器技术,结合车辆定位和导航算法,实现了智能停车场的实时监测、导航和管理。
3、在相关技术中,比如中国专利文献cn114999203a中提供了一种基于5g和ar技术的停车场导航、寻车方法及装置、计算机设备,包括以下步骤:获取整个停车场的停车位及待停车辆的实时信息;对停车位实时信息数据及待停车辆实时信息数据进行处理计算,得到空余停车位与待停车辆分析计算数据;获取待停车辆定位信息;生成待停车辆到空余停车位的ar导航地图,并在用户所使用的终端设备上显示,引导用户驶入可用停车位停车。但是该方案至少存在:导航路径规划时仅考虑车辆与空余停车位之间的距离,导致规划出的导航路径并非最优,因此停车效率有待进一步提高。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的停车效率低的问题,本发明提供了一种基于ar技术的停车管理方法及系统,通过构建停车场精确三维场景和ar导航等,提高了停车效率。
3、2.技术方案
4、本发明的目的通过以下技术方案实现。
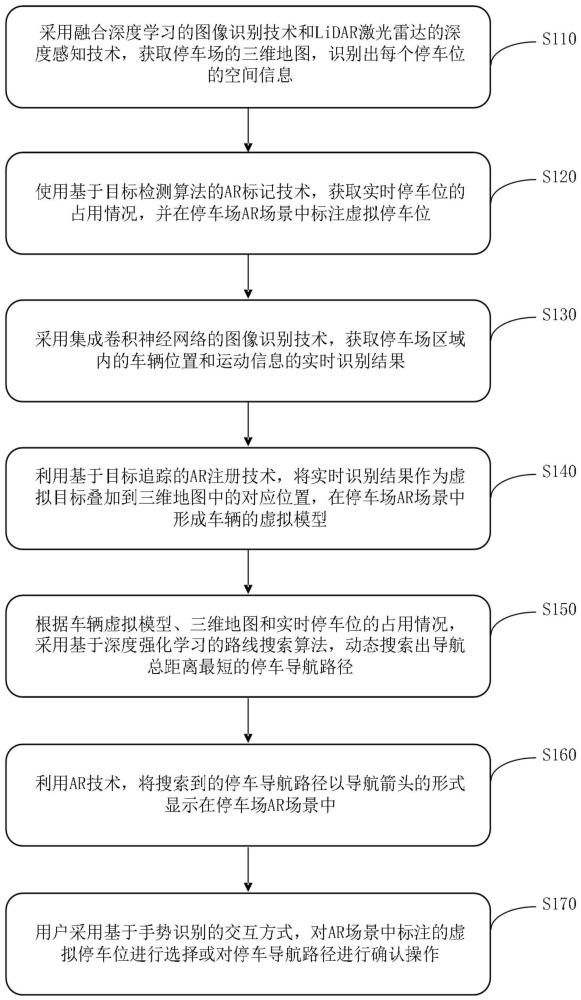
5、本说明书实施例的一个方面提供一种基于ar技术的停车管理方法,包括:采用融合深度学习的图像识别技术和lidar激光雷达的深度感知技术,获取停车场的三维地图,识别出每个停车位的空间信息,空间信息包含位置、大小、形状和顺序;使用基于目标检测算法的ar标记技术,获取实时停车位的占用情况,并在停车场ar场景中标注虚拟停车位;虚拟停车位包含:空余车位、已占用车位、残障人士车位和充电车位;采用集成卷积神经网络的图像识别技术,获取停车场区域内的车辆位置和运动信息的实时识别结果;利用基于目标追踪的ar注册技术,将实时识别结果作为虚拟目标叠加到三维地图中的对应位置,在停车场ar场景中形成车辆的虚拟模型;根据车辆虚拟模型、三维地图和实时停车位的占用情况,采用基于深度强化学习的路线搜索算法,动态搜索出导航总距离最短的停车导航路径;利用ar技术,将搜索到的停车导航路径以导航箭头的形式显示在停车场ar场景中;用户采用基于手势识别的交互方式,对ar场景中标注的虚拟停车位进行选择或对停车导航路径进行确认操作。
6、进一步地,获取停车场的三维地图的步骤包括:对传感器采集的场景图像,使用卷积神经网络模型进行语义分割,识别每个停车位的空间信息,输出包含停车位空间信息的图像;对包含停车位空间信息的图像,利用编码算法进行编码,输出包含经编码的停车位空间信息的数字图像;对lidar采集的点云数据,使用基于光流法的点云配准方法,生成包含场景深度信息的三维点云;将数字图像和三维点云,输入到基于点云投影的多源数据融合模型中,进行数字图像和三维点云的空间像素级对齐,输出包含停车位及场景信息的三维地图。
7、进一步地,生成三维点云的步骤包括:对采集的lidar点云数据,使用含有huber损失函数的光流网络模型,计算两帧点云之间的光流场信息;将计算所得的光流场信息输入到双向传播算法模型中,输出两帧点云的旋转和平移参数;根据双向传播算法输出的两帧点云旋转和平移参数,进行两帧点云的位姿校准;将位姿校准后的两帧点云输入基于icp的点云配准模型中,进行三维点云配准,输出三维点云。
8、进一步地,计算两帧点云之间的光流场信息的步骤包括:对采集的lidar点云数据,使用滤波算法进行去噪处理,输出去噪后的点云数据;将去噪后的点云数据输入icp点云配准模型,输出配准在同一坐标系下的点云数据;提取配准后的点云数据的几何特征,输出点云特征数据;几何特征包含xyz坐标和法向量;构建含有huber损失函数的卷积神经网络作为点云光流网络模型;构建点云数据集,每个数据样本包含采集的点云数据和标签光流场;使用点云数据集训练点云光流网络模型,通过最小化训练过程中网络预测的光流场和标签光流场的huber损失,得到训练好的点云光流网络模型;利用训练好的点云光流网络模型计算两帧点云之间的光流场信息。
9、进一步地,在停车场ar场景中标注虚拟停车位的步骤包括:获取停车场的实时图像数据;使用目标检测算法处理获得的图像数据,检测各个停车位的占用情况,识别出空余车位、已占用车位、残障人士车位和充电车位,输出包含目标类别和坐标框的检测结果;根据检测结果,通过unity和vuforia对检测到的不同类别停车位进行虚拟标注,生成虚拟停车位模型;将生成的虚拟停车位模型的坐标转换为三维地图坐标系下的坐标;使用三维地图的api接口,调用注册虚拟对象的函数,将转换坐标后的虚拟停车位模型注册到三维地图中,以对停车位进行ar空间标注;当停车位的占用情况发生变化时,通过web socket或restful接口调用ar标注服务,更新注册到三维地图中的虚拟停车位模型的属性。
10、进一步地,获取车辆位置和运动信息的实时识别结果的步骤包括:采用网络选择控制器,记录当前网络,初始网络为第一网络;获取第一帧图像,计算图像梯度分布直方图,判断直方图的峰度是否大于阈值t1,如果是则,将场景判定为低复杂度场景;如果场景判定为低复杂度场景,则计算车辆运动速度,并判断车辆运动速度是否大于阈值t2,如果车辆运动速度大于t2,则利用网络选择控制器将第一网络切换为第二网络;如果网络未切换到第二网络,则计算车辆的当前帧和前帧的坐标,利用卡尔曼滤波算法融合多帧速度,得到车辆位置的变化速度;判定变化速度是否小于阈值t3,如果是,则利用网络选择控制器将第一网络切换为第三网络;根据网络选择控制器中的当前网络对当前帧的车辆进行定位;将不同网络的定位结果与车辆运动状态结合,输出车辆位置和运动信息;其中,第一网络采用n1定点数的卷积神经网络;第二网络采用n1位定点数的前向传播与n2位浮点数的反向传播相结合的卷积神经网络;第三网络采用低位宽整数的卷积神经网络;n2的数值大小是n1的整数倍。
11、进一步地,采用网络选择控制器,记录当前网络的步骤包括:采用网络选择控制器,在控制器内设置状态变量network_version,用于记录被调用的网络,初始值设为m1,表示第一网络;获取时序图像输入,并根据场景和目标分析判断需要切换的网络;根据判断结果,更新network_version的值,切换到目标网络;network_version的取值为m1、m2和m3,分别代表第一网络、第二网络和第三网络。
12、进一步地,将第一网络切换为第二网络的步骤包括:在低复杂度场景下,利用目标检测模型处理当前帧图像,输出包含车辆的目标检测结果;获取当前帧和前一帧的目标检测结果中的车辆识别框坐标;计算前一帧和当前帧中同一车辆坐标框的中心点位置距离差;根据中心点位置距离差和两帧间的间隔,计算车辆的运动速度;判断车辆的运动速度是否大于阈值t2,如果是则将network_version设为m2,将第一网络切换为第二网络。
13、进一步地,将第一网络切换为第三网络的步骤包括:在未切换到第二网络的情况下,获得当前帧和前一帧车辆识别框中心坐标;使用卡尔曼滤波算法融合多帧中心坐标,计算车辆位置的变化速度;判断变化速度是否小于阈值t3,如果是则将network_version设为m3,将第一网络切换为第三网络。
14、本说明书实施例的另一个方面还提供一种基于ar技术的停车管理系统,包括:场景信息获取模块,用于获取停车场的三维场景信息;停车位检测模块,用于实施检测停车位的占用情况;车辆定位模块,用于实时定位和跟踪场景中的车辆;导航路径规划模块,用于根据车辆位置和停车位信息,规划停车导航路径;交互显示模块,用于显示导航路径、车辆和停车位信息;场景信息获取模块包含:图像获取单元,获取停车场图像;图像识别单元,对获取的图像进行语义分割,识别停车位空间信息;编码单元,对识别的停车位空间信息进行编码;深度获取单元,获取停车场的深度信息;数据融合单元,将编码的停车位信息和深度信息进行融合,生成三维场景地图;停车位检测模块包含:目标检测单元,检测停车位的占用情况;注册单元,将检测结果注册到三维场景地图中,以增强停车位的现实标注;车辆定位模块包含:多网络单元,包含不同网络以处理不同场景中的车辆定位;网络选择单元,根据场景信息选择不同的网络进行车辆定位;车辆定位单元,结合不同网络的车辆定位结果和车辆运动信息,获取车辆的精确定位。
15、3.有益效果
16、相比于现有技术,本发明的优点在于:
17、(1)通过利用先进的传感器、摄像头、雷达和激光扫描仪等设备,实现车辆的自主导航和自动驾驶功能。通过将这一技术应用于停车场管理系统中,可以实现车辆的自动寻找停车位、自动进出停车位以及自动停放和取车的功能。这将大大简化停车过程,减少人为驾驶引起的停车耗时和纰漏,从而提高停车效率;
18、(2)通过设置传感器和摄像头等设备对停车场进行实时数据采集。这些采集到的数据包括停车位的空置情况、停车位的实时占用状态、车辆的行驶路线和停放时间等等。通过对这些数据进行实时分析和处理,可以确定停车场内停车位的使用率、高峰时段和拥挤程度等信息。基于这些信息,管理系统可以智能调配停车资源,例如引导车辆直接进入空置的停车位,避免车辆在停车场内徘徊,从而提高停车效率;
19、(3)通过将停车场内的路况信息、停车位的实时占用情况以及车辆的目的地等因素考虑在内,系统可以为车辆提供最佳的停车路线和导航指引。例如,当用户进入停车场时,系统可以根据用户的目的地和停车位的空置情况,智能规划一条最短、最合适的路线,指引用户迅速找到合适的停车位,从而节省时间和精力,提高停车效率。
- 还没有人留言评论。精彩留言会获得点赞!