基于图像识别的汽车盲区智能预警方法、系统及云平台与流程
本发明涉及图像处理,特别涉及一种基于图像识别的汽车盲区智能预警方法、系统及云平台。
背景技术:
1、汽车盲区,是指驾驶员位于正常驾驶座位置,其视线被车体遮挡而不能直接观察到的那部分区域。汽车盲区主要有四大视觉盲区(前盲区、后盲区、后视镜盲区、ab柱盲区)以及一些人为盲区。由于汽车盲区造成的交通事故不计其数,给人们的生命财产安全带来了极大的威胁,因此,如何精准实现汽车盲区的预警处理是当下的一个关键问题。。
技术实现思路
1、为改善相关技术中存在的技术问题,本发明提供了一种基于图像识别的汽车盲区智能预警方法、系统及云平台。
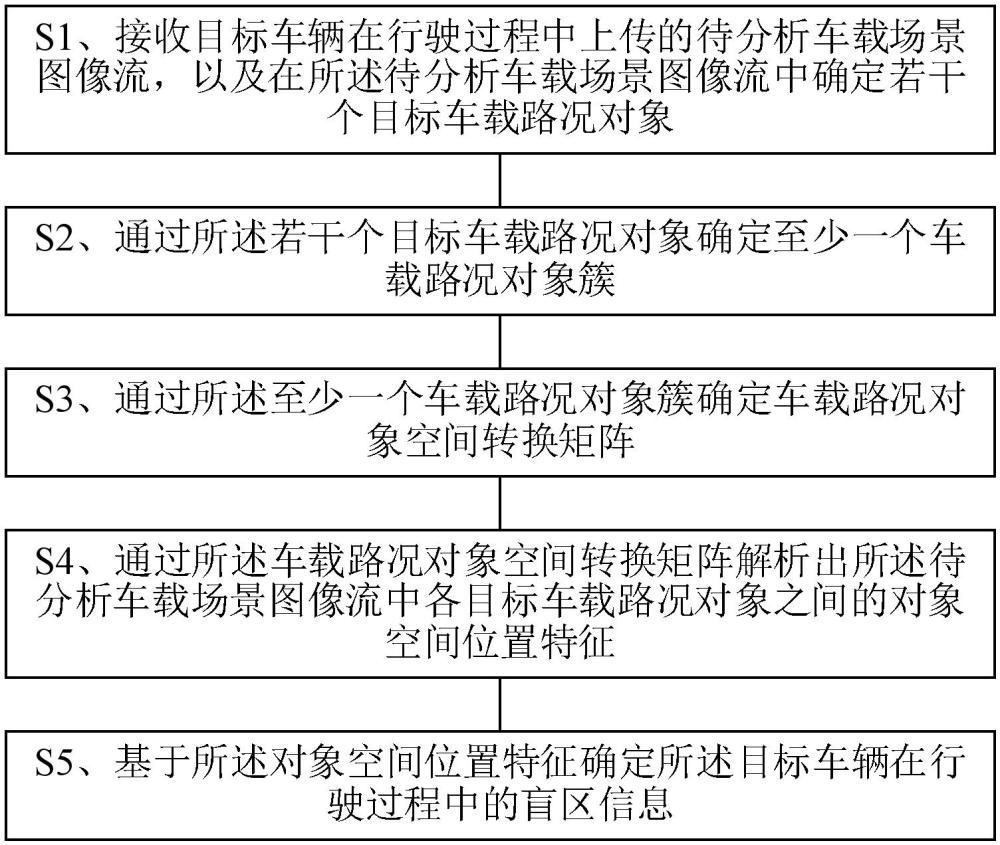
2、第一方面,本发明实施例提供了一种基于图像识别的汽车盲区智能预警方法,应用于汽车盲区智能预警云平台,所述方法包括:接收目标车辆在行驶过程中上传的待分析车载场景图像流,以及在所述待分析车载场景图像流中确定若干个目标车载路况对象;通过所述若干个目标车载路况对象确定至少一个车载路况对象簇,其中,各所述车载路况对象簇包括至少两个目标车载路况对象;通过所述至少一个车载路况对象簇确定车载路况对象空间转换矩阵;所述车载路况对象空间转换矩阵用于反映各车载路况对象簇中包括相同目标车载路况对象的车载路况对象簇之间的相对空间位置;通过所述车载路况对象空间转换矩阵解析出所述待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征;基于所述对象空间位置特征确定所述目标车辆在行驶过程中的盲区信息。
3、如此一来,在获取到待分析车载场景图像流之后,可以先在待分析车载场景图像流中确定若干个目标车载路况对象,并基于该若干个目标车载路况对象确定至少一个车载路况对象簇。进一步地,能够基于该至少一个车载路况对象簇确定车载路况对象空间转换矩阵,并基于该车载路况对象空间转换矩阵解析出待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征。这样,可以基于车载路况对象簇确定车载路况对象空间转换矩阵,进而能够基于该车载路况对象空间转换矩阵解析出随机两个目标车载路况对象之间的对象空间位置特征,此外,还可以解析出车载路况对象簇之间的对象空间位置特征,进而能够解析出若干个目标车载路况对象之间的对象空间位置特征,这样能够得到完整、准确的各目标车载路况对象之间的对象空间位置特征,以便基于对象空间位置特征准确确定目标车辆在行驶过程中的盲区信息,提高针对盲区信息预警处理的精度和可信度。
4、对于一些可能的设计思路而言,所述通过所述至少一个车载路况对象簇确定车载路况对象空间转换矩阵,包括:在所述至少一个车载路况对象簇的数目为若干个的基础上,基于若干个所述车载路况对象簇确定路况对象二元组单元,得到若干个路况对象二元组单元,其中,每个车载路况对象簇对应一个路况对象二元组单元;生成随机两个所述路况对象二元组单元之间的对象单元相对空间位置,得到基础对象空间位置特征分布;获取各路况对象二元组单元之间的空间碰撞预测变量,并清洗掉所述基础对象空间位置特征分布中不符合所述空间碰撞预测变量的对象单元相对空间位置,得到所述车载路况对象空间转换矩阵。
5、这样,可以在基于至少一个车载路况对象簇的数目为若干个的基础上,基于若干个车载路况对象簇确定路况对象二元组单元,得到若干个路况对象二元组单元,并通过生成随机两个路况对象二元组单元之间的对象单元相对空间位置,得到基础对象空间位置特征分布,进而能够使得到的基础对象空间位置特征分布的信噪比较高,这样能够在对象空间位置特征解析时提高空间位置定位的精度。此外,还能够通过获取各路况对象二元组单元之间的空间碰撞预测变量,并清洗掉基础对象空间位置特征分布中不符合该空间碰撞预测变量的对象单元相对空间位置,得到车载路况对象空间转换矩阵的思路,可以提高基于车载路况对象空间转换矩阵解析出各目标车载路况对象之间的对象空间位置特征的时效性,保障空间位置定位的效率。
6、对于一些可能的设计思路而言,所述通过所述车载路况对象空间转换矩阵解析出所述待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征,包括:获取对象空间位置特征解析网络;将所述车载路况对象空间转换矩阵加载到所述对象空间位置特征解析网络中进行解析处理,得到所述待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征,其中,所述对象空间位置特征包括:各所述车载路况对象簇中所包括目标车载路况对象之间的第一对象空间位置特征,和/或,各车载路况对象簇之间的第二对象空间位置特征得到所述待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征。
7、这样,可以先获取对象空间位置特征解析网络,并通过将车载路况对象空间转换矩阵加载到该对象空间位置特征解析网络中进行解析出,得到待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征的思路,可以实现待分析车载场景图像流中对象空间位置特征的智能化解析。此外,这样还可以解析得到每个车载路况对象簇所包括目标车载路况对象之间的对象空间位置特征以及得到各车载路况对象簇之间的对象空间位置特征,进而能够得到待分析车载场景图像流中较为完整准确的对象空间位置特征,进而提高了基于图像识别的汽车盲区智能预警方法的可信度。
8、对于一些可能的设计思路而言,所述方法还包括:获取车载场景图像流样例簇;其中,所述车载场景图像流样例簇中包括若干个车载场景图像流样例和网络调试先验依据,各所述车载场景图像流样例包括待调试对象空间位置特征分布,各所述车载场景图像流样例的网络调试先验依据包括相对应待调试对象空间位置特征分布中每个待调试车载路况对象簇中所包括车载路况对象的对象空间位置特征的空间位置关键词和/或各车载路况对象簇之间的对象空间位置特征的空间位置关键词;通过所述车载场景图像流样例簇对待调试对象空间位置特征解析网络进行调试,得到所述对象空间位置特征解析网络。
9、对于一些可能的设计思路而言,所述通过所述车载场景图像流样例簇对待调试对象空间位置特征解析网络进行调试,得到所述对象空间位置特征解析网络,包括:将所述车载场景图像流样例簇加载到所述待调试对象空间位置特征解析网络中进行调试,得到各所述车载场景图像流样例的基础调试报告;其中,所述基础调试报告用于反映所述待调试对象空间位置特征分布中每个待调试车载路况对象簇中所包括车载路况对象的对象空间位置特征的回归分析数据和/或各车载路况对象簇之间对象空间位置特征的回归分析数据;确定所述基础调试报告中的目标调试报告,其中,所述目标调试报告为与对应的网络调试先验依据不相同的调试报告;通过所述目标调试报告优化交叉熵训练代价的偏置系数,并基于优化之后的偏置系数,确定交叉熵训练代价的训练代价指标;通过所述交叉熵训练代价的训练代价指标优化所述待调试对象空间位置特征解析网络的网络变量,直至得到符合调试要求的所述待调试对象空间位置特征解析网络,并将符合调试要求的所述待调试对象空间位置特征解析网络确定为所述对象空间位置特征解析网络。
10、这样,可以基于车载场景图像流样例簇调试对待调试对象空间位置特征解析网络进行调试,并且可以基于目标调试报告优化交叉熵训练代价的偏置系数,进而能够使待调试对象空间位置特征解析网络更关注存在解析误差的车载场景图像流样例,进而能够改善待调试对象空间位置特征解析网络的回归分析偏差,这样能够提高得到的对象空间位置特征解析网络的解析准确性。
11、对于一些可能的设计思路而言,所述通过所述若干个目标车载路况对象确定至少一个车载路况对象簇,包括:为所述若干个目标车载路况对象中的每个目标车载路况对象添加对应的车载路况对象类别标签,得到若干个车载路况对象类别标签;通过所述若干个车载路况对象类别标签确定所述至少一个车载路况对象簇,其中,各所述车载路况对象簇中包括该车载路况对象簇所对应目标车载路况对象的车载路况对象类别标签。
12、对于一些可能的设计思路而言,所述为所述若干个目标车载路况对象中的每个目标车载路况对象添加对应的车载路况对象类别标签,包括:获取所述若干个目标车载路况对象中每个目标车载路况对象的对象轮廓尺寸图像;对所述对象轮廓尺寸图像进行图像特征提取,得到图像特征提取信息,并通过所述图像特征提取信息确定对应目标车载路况对象的车载路况对象类别标签。
13、这样,可以在获取每个目标车载路况对象的对象轮廓尺寸图像之后,对该对象轮廓尺寸图像进行图像特征提取得到图像特征提取信息,并基于该图像特征提取信息确定每个目标车载路况对象的车载路况对象类别标签,进而能够将待分析车载场景图像流中的若干个目标车载路况对象调整成对象空间位置特征解析网络可以解析出的车载路况对象类别标签的模式,进而能够更好的利用对象空间位置特征解析网络解析出待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征。然后,基于若干个目标车载路况对象对应的若干个车载路况对象类别标签确定至少一个车载路况对象簇的思路,可以提高对象空间位置特征解析网络解析出目标车载路况对象之间的对象空间位置特征的时效性,进而提高了对象空间位置特征解析的时效性。
14、对于一些可能的设计思路而言,所述通过所述图像特征提取信息确定对应目标车载路况对象的车载路况对象类别标签,包括:在所述图像特征提取信息为若干个的基础上,确定若干个所述图像特征提取信息的加权结果,得到目标图像特征提取信息;将所述目标图像特征提取信息与所述图像特征提取信息的数目进行特征运算,得到该目标车载路况对象的车载路况对象类别标签。
15、这样,可以在针对每个目标车载路况对象的图像特征提取信息为若干个的基础上,可以对该若干个图像特征提取信息进行加权平均的思路得到每个目标车载路况对象的唯一车载路况对象类别标签,进而能够降低基于图像识别的汽车盲区智能预警方法的误差,提高空间位置定位的精度,这样能够提高基于图像识别的汽车盲区智能预警方法的精度。
16、对于一些可能的设计思路而言,所述在所述待分析车载场景图像流中确定若干个目标车载路况对象,包括:确定视频图像检测框的检测框尺寸信息;所述视频图像检测框为用于对所述待分析车载场景图像流中进行对象捕捉检测的框;确定当前时间节点所述待分析车载场景图像流中处于所述视频图像检测框内的目标车载场景图像,以及在所述目标车载场景图像中解析出车载路况对象捕捉提示;通过所述车载路况对象捕捉提示在所述目标车载场景图像中解析出对应车载路况对象的对象轮廓尺寸图像,得到至少一个基础车载路况对象,并通过所述至少一个基础车载路况对象确定所述目标车载路况对象。
17、这样,可以通过视频图像检测框遍历待分析车载场景图像流,得到若干个目标车载路况对象,进而能够在待分析车载场景图像流较长的基础上利用视频图像检测框将待分析车载场景图像流进行拆解,并可以此外进行目标车载路况对象的解析出,从而提高了确定待分析车载场景图像流中若干个目标车载路况对象的效率,进而提高了对象空间位置特征解析的时效性。此外,还可以通过车载路况对象捕捉提示对待分析车载场景图像流中的车载路况对象进行精准捕捉,这样能够提高确定待分析车载场景图像流中目标车载路况对象的精度,进而提高对象空间位置特征解析的精度。
18、对于一些可能的设计思路而言,所述通过所述至少一个基础车载路况对象确定所述目标车载路况对象,包括:在所述至少一个基础车载路况对象的车载路况对象数目为若干个的基础上,对若干个所述基础车载路况对象进行车载路况对象校对处理,并基于完成校对处理的基础车载路况对象确定所述目标车载路况对象。
19、这样,可以在基础车载路况对象的车载路况对象数目为若干个的基础上对该若干个基础车载路况对象进行校对处理,从而降低了在对象空间位置特征解析的过程中的误导,从而提高了对象空间位置特征解析的准确性。
20、对于一些可能的设计思路而言,所述方法还包括:获取针对所述盲区信息的盲区碰撞预警事件集合,所述盲区碰撞预警事件集合包括至少两个盲区碰撞预警事件;获得所述盲区碰撞预警事件集合中的各个盲区碰撞预警事件与所述盲区信息之间的联动系数;根据所述各个盲区碰撞预警事件对应的联动系数,以及所述各个盲区碰撞预警事件的趋势预测向量,对所述各个盲区碰撞预警事件进行整理,得到相应的盲区碰撞预警事件序列;基于所述盲区碰撞预警事件序列构建关于所述盲区信息的目标预警提示序列,所述目标预警提示序列包括至少两个目标预警提示等级;
21、其中,所述根据所述各个盲区碰撞预警事件对应的联动系数,以及所述各个盲区碰撞预警事件的趋势预测向量,对所述各个盲区碰撞预警事件进行整理,得到相应的盲区碰撞预警事件序列,包括:根据所述各个盲区碰撞预警事件对应的联动系数,以及所述各个盲区碰撞预警事件的趋势预测向量,对所述各个盲区碰撞预警事件进行拆解,得到至少两个盲区碰撞预警事件子集;对各个盲区碰撞预警事件子集进行整理,并分别对所述各个盲区碰撞预警事件子集中的各个盲区碰撞预警事件进行整理,得到所述盲区碰撞预警事件序列;
22、其中,所述根据所述各个盲区碰撞预警事件对应的联动系数,以及所述各个盲区碰撞预警事件的趋势预测向量,对所述各个盲区碰撞预警事件进行拆解,得到至少两个盲区碰撞预警事件子集,包括:分别根据所述各个盲区碰撞预警事件对应的联动系数,对所述各个盲区碰撞预警事件的趋势预测向量进行加权,得到所述各个盲区碰撞预警事件的碰撞趋势预测向量;根据所述各个盲区碰撞预警事件的碰撞趋势预测向量对所述各个盲区碰撞预警事件进行分团,得到至少两个盲区碰撞预警事件子集;
23、其中,所述对各个盲区碰撞预警事件子集之间进行整理,并分别对所述各个盲区碰撞预警事件子集中的各个盲区碰撞预警事件进行整理,得到所述盲区碰撞预警事件序列,具体包括:根据各个盲区碰撞预警事件子集所包含的盲区碰撞预警事件的数目,对所述各个盲区碰撞预警事件子集进行整理;以及,针对所述各个盲区碰撞预警事件子集,分别执行以下操作:根据所述盲区碰撞预警事件子集中各个盲区碰撞预警事件的趋势预测向量与所述盲区碰撞预警事件子集的相关性权重,对所述盲区碰撞预警事件子集中的各个盲区碰撞预警事件进行整理;基于所述各个盲区碰撞预警事件子集之间的整理结果,以及所述各个盲区碰撞预警事件子集中各个盲区碰撞预警事件的整理结果,生成所述盲区碰撞预警事件序列。
24、第二方面,本发明还提供了一种基于图像识别的汽车盲区智能预警系统,包括互相之间通信的汽车盲区智能预警云平台和目标车辆;所述汽车盲区智能预警云平台用于:接收目标车辆在行驶过程中上传的待分析车载场景图像流,以及在所述待分析车载场景图像流中确定若干个目标车载路况对象;通过所述若干个目标车载路况对象确定至少一个车载路况对象簇,其中,各所述车载路况对象簇包括至少两个目标车载路况对象;通过所述至少一个车载路况对象簇确定车载路况对象空间转换矩阵;所述车载路况对象空间转换矩阵用于反映各车载路况对象簇中包括相同目标车载路况对象的车载路况对象簇之间的相对空间位置;通过所述车载路况对象空间转换矩阵解析出所述待分析车载场景图像流中各目标车载路况对象之间的对象空间位置特征;基于所述对象空间位置特征确定所述目标车辆在行驶过程中的盲区信息。
25、第三方面,本发明还提供了一种汽车盲区智能预警云平台,包括处理器和存储器;所述处理器和所述存储器通信连接,所述处理器用于从所述存储器中读取计算机程序并执行,以实现上述的方法。
26、第四方面,本发明还提供了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现上述的方法。
- 还没有人留言评论。精彩留言会获得点赞!