一种结合需求吸引和危险防范的城市低空航路网络规划方法
本发明涉及在城市空中交通网络规划,具体涉及一种结合需求吸引和危险防范的城市低空航路网络规划方法。
背景技术:
1、随着垂直起降航空器的快速发展,城市空中交通作为一种新型交通运输模式,逐渐引发了人们的关注,由此促进了城市空中交通相关的新概念、新技术蓬勃发展。尤其是城市空中交通中的无人机物流,运输市场广阔、潜能巨大,是缓解地面物流运输压力的有效途径之一。无人机的生产和运行成本低廉,机动性和可操作性高,无需人员随行的特点都使无人机在诸多领域有着巨大的发展潜能。然而,无人机系统在低空空域的运行环境却非常复杂。因此随着无人机数量的逐步增加、低空空域的逐步开放和互联网经济的高速增长,无人机系统的快速发展给未来低空建设带来了新的机遇和挑战。目前,我国低空空域尚未完全开放,诸如城市低空航路网络规划、无人机运行模式等核心问题也仍处于探索阶段。
2、现有航路网络规划方法是基于简单的拓扑结构或直接逐个添加航线,难以解决大规模网络规划问题。尤其是城市低空航路网络规划结果难以实践应用,没有从经济性与安全性角度综合分析城市的物流需求和建筑物障碍。未来低空或将面对大量物流无人机的运行需求,为避免无人机间冲突,势必需要对无人机在低空空域内的运行航路进行规划,进而保障低空空中交通的安全、有序、高效运行,对低空交通运行瓶颈的研究显得至关重要。
技术实现思路
1、发明目的:针对现有技术不足,本发明提出一种结合需求吸引和危险防范的城市低空航路网络规划方法,在城市低空航路规划中,既从需求吸引角度满足经济性,又从危险防范角度保障安全性,从经济性与安全性角度综合分析城市的物流需求和建筑物障碍。
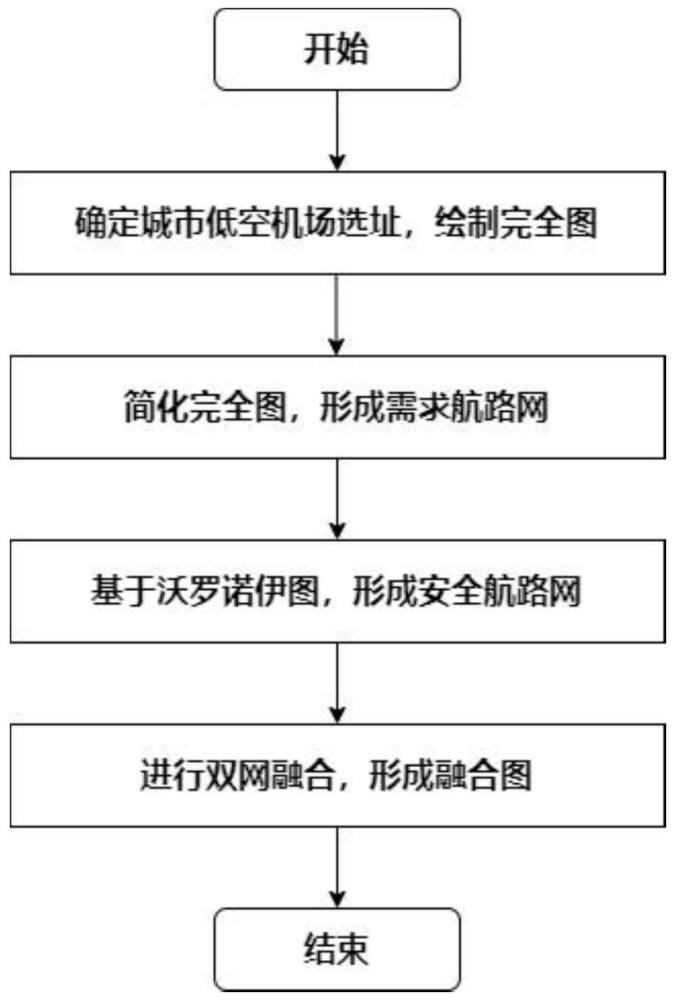
2、技术方案:一种结合需求吸引和危险防范的城市低空航路网络规划方法,包括以下步骤:
3、(1)基于需求、用地等数据确定城市低空机场选址,绘制并简化完全图,形成基于需求吸引的航路网络即需求航路网;
4、(2)基于障碍物数据提取低空危险点,绘制沃罗诺伊图,形成基于危险防范的航路网络即安全航路网;
5、(3)对需求航路网和安全航路网进行双网融合,将需求航路网中与危险点有冲突的初始计划飞行航段替换为安全航路网中的优化实际飞行航路,进而生成融合航路网。
6、进一步地,所述步骤(1)中充分考虑土地利用、实际订单需求因素并将上述因素进行综合分析进而确定城市低空机场选址,并明确机场空间分布。将最终所有确定的机场点两两相连从而绘制完全图。所述完全图是由全部机场节点和航段组成的图,表示为:
7、g=(n,s)
8、s={s|sij:oidj,oi,dj∈n}
9、其中,n={o,d}由网络中所有出发机场即物流配送节点集合o和到达机场即用户需求节点集合d组成,s代表网络中所有的航段,sij为连接出发机场oi和到达机场dj的有向初始计划航段。
10、因所有机场两两连通后完全图过于冗杂,对生成的完全图进行简化,将完全图中sall{o,d}简化为s',以简化完全图。将sall{o,d}视为待删除集合s0,其中s0所有航段元素的数量为n(n-1),n为区域内全部机场数量。
11、将s0内所有航段元素按长度进行排序:
12、s0={s1,s2,...,sn(n-1)},(si≤si+1)
13、对于s0内最长航段sq,寻找起终点相与该直线航段相同且总长度小于等于e·sq的折线航段,如果可以找到折线航段则用其代替此最长直线航段,即从待删除集合s0中删除最长直线航段,其中航段非直线系数e的取值范围为[1,5];如果寻找不到对应折线航段则将此最长直线航段从待删除集合s0移动至简化后航段集合s';重复前两个步骤直至s'内航段元素数量等于k·n,其中网络简化系数k的取值范围为[1,n-1]。
14、通过上述方法,在保证任意两个机场都连通的基础上将其余冗杂航段简化,形成基于需求吸引的航路网络即需求航路网,表示为:
15、g'=(n,s')
16、进一步地,所述步骤(2)中统计低空航路网络覆盖范围内所有可能影响航空器在城市低空内运行的楼宇建筑、山脉、电力设施等障碍物高度及位置信息形成低空危险点,以每个低空危险点中心所在位置视为离散点pw,其中w为障碍物编号。对于楼宇建筑障碍物,将任一建筑物中心点或若干相近建筑物集群中心点视为离散点。对于单一障碍物避障距离为:
17、rmax=amax+c
18、对于相近障碍物集群避障距离为:
19、rmax=bmax+c
20、其中rmax为障碍物最大避障距离,amax为任何单一障碍物距其中心点最远长度,bmax为障碍物群距其中心点最远长度,c为无人机最小安全间隔,有5m≤c≤50m。
21、利用空间分割算法,采用delaunay三角剖分算法生成航段连接关系,设空间内不共位的离散点点集p=p1,p2,...,pn,任意一点pn为某一凸多边形ti的中心,凸多边形内任意一点到其他点pj(j≠i)的距离均大于到该凸多边形内pj的距离,沃罗诺伊多边形为:
22、
23、l={l|lij:pipj,pi,pj∈p}
24、其中d(t,p)为点t和子集p的距离,l为所有优化实际飞行航路集合,lij为pi和pj中垂线所构成的航路。
25、沃罗诺伊图即原胞ti(i∈w)的元组,将胞点连起來构成若干三角形,利用中垂线找外心,将所有外心相连的线段即为优化实际飞行航路,最终形成基于危险防范的航路网络即安全航路网。
26、进一步地,所述步骤(3)中对于需求航路网中所有连接每对机场之间的初始计划飞行航段,寻找并提取其中所有与低空危险点有冲突的航段。飞行高度约束的表达式为:
27、hmax≤zu
28、其中,zu表示航段上第u个航路点节点高度;hmax表示障碍物最高高度。
29、所述航段与低空危险点安全间隔约束的表达式为:
30、
31、其中,rmax表示任意单一障碍物的最大避障距离,xu,yu,zu分别表示初始计划航段上第u个航路点节点的坐标,xv,yv,zv分别表示航路网络中第v个低空危险点的坐标。
32、对于上述需求航路网中不满足约束条件的初始计划航段,寻找并提取出安全航路网中与这些航段起终点相重合的沃罗诺伊多边形边线段。
33、使用安全航路网中提取出相重合的沃罗诺伊多边形边线段视为优化实际飞行航路,替换与其重合且与低空危险点有冲突的初始计划飞行航段,即用lmn替换对应的sij。lmn对应起终点分别为om和on,sij对应起终点分别为oi和oj,而om、on与oi、oj应符合如下约束条件:
34、
35、
36、其中,do-o'表示o和o'两点间距离,即om应为安全航路网节点中距离oi最近的点,on应为安全航路网节点中距离oj最近的点。
37、另外,om与oi之间应增加能避开低空危险点的优化实际飞行航路on与oj之间也应增加能避开低空危险点的优化实际飞行航路完成全部航路替换后,双网融合进而生成融合航路网。
38、有益效果:本发明在城市低空航路规划中,既从需求吸引角度满足经济性,又从危险防范角度保障安全性。从经济性与安全性角度综合分析城市的物流需求和建筑物障碍,进而解决大规模网络规划问题,尤其是将城市低空航路网络规划结果予以实践应用,从而保障低空空中交通的安全、有序、高效运行,也有助于疏解低空交通的运行瓶颈问题。
- 还没有人留言评论。精彩留言会获得点赞!