一种输电走廊临电预警装备系统的制作方法
本发明涉及电力系统临电预警,具体地说,涉及一种输电走廊临电预警装备系统。
背景技术:
1、由于电力系统多种输电线路分布较广泛,结合目前城市化进程的加快,占地面积大、子项工程多、施工紧急的城市运维、工程建设逐渐增加,诸如大型塔吊、吊臂车、升降车等施工车辆使用频率大幅增加,电力设施35kv、110kv、220kv、500kv线路,存在横跨建筑工程施工现场可能性,作为非电网企业的施工车辆对线路风险和保护意识不足,一旦作业范围外扩,极有可能造成输电线路故障、现场人身安全隐患及保供电事故。
2、应用临电预警技术,对复杂输电线路下的施工车辆装载临电预警装置,并在塔吊、吊臂车、升降车工作过程中实时检测周围电场情况,对靠近安全距离进行实时预警,将有效提高现场临电监控水平,保护电网线路及现场作业人员安全具有重要意义。
3、临电预警技术目前主要在智能临电预警安全帽产品中应用。主要适用在配网场景下,当佩戴安全帽的人员靠近带电体时,通过临电预警技术形成临电预警算法,实现临电预警功能,实时提醒人员靠近带电体。但鉴于其使用场景较单一,无法覆盖电力系统复杂输电走廊的多种输电线路场景并实现临电预警功能。鉴于此,我们提出了一种输电走廊临电预警装备系统。
技术实现思路
1、本发明的目的在于提供一种输电走廊临电预警装备系统,以解决上述背景技术中提出的问题。
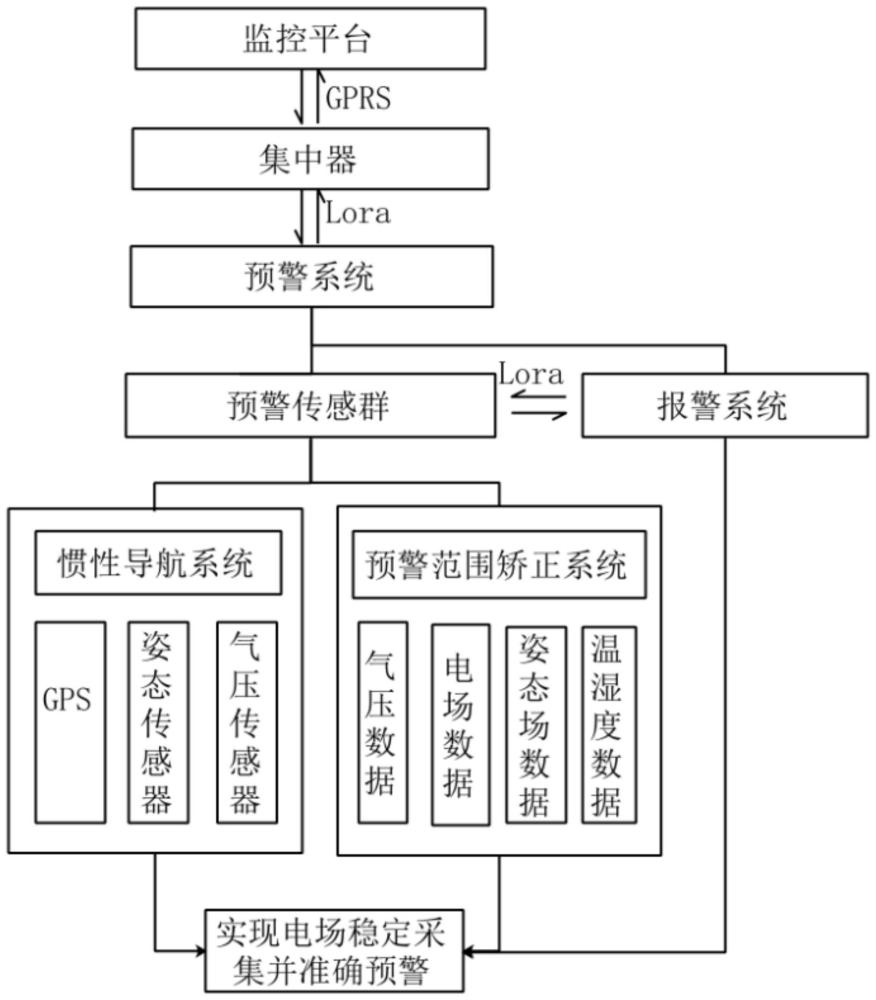
2、为实现上述技术问题的解决,本发明的目的之一在于,提供了一种预警系统,所述预警系统包括预警传感群、惯性导航系统、预警范围矫正系统和报警系统四个部分;
3、所述预警传感群用于获取施工车辆吊臂位移前后姿态数据与位置数据,获取施工车辆吊臂位移前后的电场数据;
4、所述惯性导航系统用于获取施工车辆吊臂位移前后姿态数据与位置数据,最终判断施工车辆吊臂的实际位置;
5、所述预警范围矫正系统主要通过电场传感器、姿态传感器、气压传感器、温湿度传感器等多维数据对电场进行矫正,从而保证电场采集稳定性;
6、所述报警系统用于通过通讯单元lora模块与预警传感群进行预警信息交互,当预警传感群达到预警阈值,触发报警系统,可实现预警与施工车辆的机械联动。
7、结合上述预警传感群及报警系统,可实现施工车辆吊臂、车斗等作为传感器进行电场预警,实现预警与施工车辆机械联动的人机交互功能。
8、作为本技术方案的进一步改进,所述预警传感群在应用过程中,将预警传感群安装在施工车辆吊臂、车斗位置,通过电场传感器、气压传感器、姿态传感器获取施工车辆吊臂接近带电体的电场数据,获取施工车辆吊臂位移前后的姿态数据与位置数据,获取施工车辆吊臂的高度数据,形成临电预警数据及算法。
9、作为本技术方案的进一步改进,所述惯性导航系统主要由gps、姿态传感器、气压传感器构成;
10、gps主要是通过定位形成电子围栏,提供施工车辆吊臂、车斗的绝对位置数据;
11、姿态传感器、气压传感器主要是获取施工车辆吊臂、车斗的位移数据及位置数据;
12、基于gps定位的施工车辆吊臂、车斗的绝对位置数据,通过姿态传感器、气压传感器数据获取的位移变化量判断施工车辆吊臂、车斗的实际位置,从而通过姿态、气压、定位等多数据融合消除误差,实现对施工车辆吊臂、车斗位置矫正,gps定位及空间定位功能。
13、作为本技术方案的进一步改进,所述惯性导航系统主要是通过对传感器的空间姿态进行实时计算,将加速度转换至导航坐标系(n系)中进行二次积分,分别获得空间速度与位置;具体为:
14、首先使用四元数q=[q0 q1 q2 q3]t作为姿态表示方法,使用一阶近似对四元数微分方程求数值解,可得离散化的四元数更新方程:
15、
16、式中,qk-1为更新前的姿态数据,qk为更新后的姿态数据,ω=[ωx ωy ωz]为陀螺仪采集到的三轴角速度数据,i4×4为4×4矩阵,t为采样周期;利用上式计算后再将其归一化,即完成了通过陀螺仪数据更新姿态;
17、将加速度计数据由载体坐标系(b系)转换至导航坐标系(n系),减去重力向量后即可得到空间中的运动加速度:
18、
19、其中,a为运动加速度,左上标n/b表示向量所处的坐标系,gn为当地重力加速度模值;为由b系到n系的方向余弦矩阵,其可通过四元数表示为:
20、
21、之后,即可对加速度na进行二次积分,分别得到空间速度nv与位置np。
22、作为本技术方案的进一步改进,所述惯性导航系统中,还通过扩展卡尔曼滤波算法对系统中各个变量的误差进行估计;具体为:
23、首先定义5维的状态向量:
24、
25、其中包含了姿态估计误差δφ,n系中的速度误差δv和位置误差δp,以及b系中的陀螺仪偏移δω和加速度偏移δa,均为三维向量;为了方便利用测量进行更新,此处姿态误差使用欧拉角进行表示,在对姿态进行误差修正时,将-δφ/t代入式(1)即可;
26、写出系统状态更新方程:
27、
28、
29、式中,为更新后的状态向量,k为第k次采样,ωk为系统噪声,φk为系统状态矩阵,i与0均为3×3矩阵,[nak×]为向量nak对应的叉乘矩阵:
30、
31、之后,系统状态即可随着传感器采样进行迭代更新,直到获得测量值;
32、测量值有:(1)零速检测获得的δω测量值;(2)零速更新获得的δv;(3)启发式偏移清除获得的测量值;(4)气压计数据获得的δp(3)测量值;依据上述顺序,写出包含所有量的测量矩阵h:
33、
34、通过上述公式,利用卡尔曼滤波原理对系统状态进行估计,将所得的误差值从惯性导航系统所得数据中减去,即可得到系统的最终估计值,从而消除误差,实现准确定位。
35、作为本技术方案的进一步改进,基于电场传感器处于静止时,传感器与带电体具有固定的位置距离且稳定的电场特性,但鉴于电场传感器安装在施工车辆吊臂、车斗上应用,存在机械振动、作业动态移动以及受温湿度变化影响,会造成电场值偏差,故所述预警范围矫正系统通过姿态传感器、气压传感器、温湿度传感器获取电场传感器位置的三维空间坐标系,取得位移变化量,并通过消除位移量,矫正电场值,获得稳定电场,从而实现在雨天、故障情况下预警范围矫正功能。
36、作为本技术方案的进一步改进,所述预警范围矫正系统应用过程中,基于获取施工车辆吊臂的实际位置及施工车辆吊臂位移前后的电场数据,通过预警范围矫正系统对吊臂距离带电体位移变化量进行修正,从而保证电场采集的稳定性;
37、实时电场通过三维正交平板电场传感器采集而来,电场传感器感应电场的方式可以等效为三组正交平板的电容充放电的过程;其中,一组平板的充放电压过程如下式:
38、
39、式中,v0为电容初始电压,ve为电容的终止电压,vt为任意时刻电容上的电压值,r为额定电阻阻值,c为额定电容,t为时间;
40、当平板电容处于静止状态时,周围电荷分布均匀,产生的感应电压平稳,换算出的电场值稳定;当电场传感器放置于施工车辆吊臂时,车辆的作业会使电场传感器空间位置发生变化,在不同位置处,平板感应电荷量不同,与带电体的空间距离成正相关;
41、电场传感器的一个测量周期为平板电容充电过程完成的过程,充电结束后输出感应电压,并转换为电场值,但由于在测量周期中位置的改变造成了平板周围感应电荷的变化,从而导致了电场测量结果不稳定;针对电场传感器在测量时,位置移动造成的干扰因素,预警范围矫正系统通过将惯性导航系统测量获取的空间位置的变化量和电场传感器电容充电过程结合起来消除了因移动造成的测量不准问题,从而使得电场传感器在移动过程的电场测量达到了静止状态测量时的稳定度和精准度。
42、作为本技术方案的进一步改进,所述预警范围矫正系统基于卡尔曼滤波技术,实现对采集到的电场值进行矫正;其滤波步骤如下:
43、时间更新:
44、xk=axk-1+buk-1 (9)
45、预测量协方差:
46、pk=apk-1at+q (10)
47、状态更新:
48、
49、实际测量值:
50、
51、协方差更新:
52、p(k|k)=(1-kg)p(k|k-1) (13)
53、其中:a为系统的状态矩阵;b为系统观测矩阵;q为输入噪声的方差;r为观测噪声的方差;p为估计误差协方差;k为卡尔曼增益;h表示状态变量对观测变量的增益。
54、其中观测矩阵估计误差协方差、卡尔曼增益、状态矩阵、观测变量增益都将随着信号数据的输入而实时更新,因此这些参数不必预先确定。而输入噪声的方差和观测噪声方差则需要根据实际需求而确定。
55、本发明的目的之二在于,提供了一种多预警系统互联方式,主要是由预警系统、集中器、监控平台构成;
56、所述多预警系统互联方式基于所述预警系统,根据姿态、气压传感器获取施工车辆吊臂位移前后的姿态数据与位置数据,实现对施工车辆吊臂作业轨迹进行追溯;
57、基于所述预警系统,根据电场传感器获取施工车辆吊臂接近带电体的电场数据,实现输电线路空间安全作业距离范围划定;
58、基于所述预警系统,将安装在多台施工车辆吊臂上的预警系统,通过lora通讯模块与集中器进行通讯,再将集中器通过gprs模块与监控平台建立连接,实现多台施工车辆多预警系统的互联通讯方式,达到多手段监控的目的。
59、结合上述施工车辆吊臂的作业轨迹、划定空间安全作业距离范围及多预警系统,实现多台施工车辆多预警系统互联方式,达到通过临电预警技术限定施工车辆活动范围,提前进行作业计划与模拟的目的。
60、作为本技术方案的进一步改进,所述多预警系统互联方式中,基于上述预警系统,根据电场传感器获取施工车辆吊臂的电场数据,实现输电线路空间安全作业距离范围划定时,其划定思路为:
61、首先通过输电线路电场分布特性,找到预警装备预警边界范围;
62、其次,结合输电线路不同电压等级理论安全距离要求,选取不同电压等级可接受的最佳安全距离;
63、最后,依据选取的最佳安全距离,通过预警算法,在导线斜下方空间通过预警划定可接受的空间安全作业边界范围。
64、本发明的目的之三在于,提供了一种输电走廊临电预警装备系统平台装置,包括处理器、存储器以及存储在存储器中并在处理器上运行的计算机程序,处理器用于执行计算机程序时实现上述的输电走廊临电预警装备系统的作业步骤。
65、本发明的目的之四在于,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的输电走廊临电预警装备系统的作业步骤。
66、与现有技术相比,本发明的有益效果:
67、1.该输电走廊临电预警装备系统中,通过预警系统中的惯性导航系统、预警范围矫正系统,从气象、故障及施工车辆吊臂位置等要素展开,对预警传感群电场数据进行矫正,保证电场采集的稳定性。为现场作业人员提供及时准确的不同电压等级的临电预警装备,有效避免作业车辆吊臂触碰高压输电线路,保护作业人员及电力设施安全;
68、2.该输电走廊临电预警装备系统中,通过lora模块、gprs通讯单元将多台安装在施工车辆吊臂、车斗的预警系统、集中器及监控平台进行互联互通,形成多预警系统互联方式,实现多预警信息可接入现场视频监控平台,当出现第一阶段报警时,自动向安全监管部门发送消息,并定位地点,负责人可通过查看视频及向作业人员进行电话沟通等方式,及时提醒、制止作业单位,形成事前预防策略,可有效解决现有视频监控事后分析的弊端。
- 还没有人留言评论。精彩留言会获得点赞!