全网联环境下智能车辆协同汇入决策规划方法及系统
本发明涉及交通控制系统,特别涉及一种全网联环境下智能车辆协同汇入决策规划方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
2、在车路云协同环境下,匝道车辆能通过车联网(vehicle-to-everything,v2x)技术与主线车辆、路侧单元和云平台进行通信,包括车车通信(vehicle-to-vehicle,v2v)、车路通信(vehicle-to-infrastructure,v2i)、车云通信(vehicle-to-cloud,v2c)等。匝道车辆可以向主线车辆发出协同请求,与主线车辆制定协同汇入策略,并执行相应的行驶指令;因而,主线车辆可以根据匝道上车辆的位置、速度、目标轨迹等信息,进行相应的速度调整或者换道,为匝道车辆创造合适的汇入空间。因此,对智能车辆在智能网联环境下的协同汇入进行研究,对于实现安全、高效、舒适的汇入,具有重要的意义与价值。
3、传统的匝道控制方法可以有效地调节交通需求和供给,但是不能在微观上考虑车辆复杂的驾驶行为,因此不能考虑车辆微观的协同汇入行为。基于规则的汇入决策方法可以考虑协同汇入,即让主线车辆和匝道车辆之间遵循相同或不同的规则来实现协作。例如,主线车辆可以根据匝道车辆的位置和速度来调整自身速度,为匝道车辆创造合适的间隙;匝道车辆可以根据主线车辆的位置和速度来选择合适的汇入点,避免干扰主线车辆。基于博弈论的汇入策略在考虑协同汇入时,每辆车都是一个合作的个体,考虑自身和其他车辆的共同利益,通过通信或控制技术实现协调。这种情况可以用合作博弈来建模,例如帕累托最优等。基于最优化方法考虑协同汇入问题时,自我车辆(即匝道上需要进行决策规划的车辆,后续简称匝道车辆)与其他车辆形成一个协同的最优化问题,考虑自身和其他车辆的共同目标函数和约束条件,通过车联网通信技术实现车车协调。
4、然而,目前的智能网联车辆的匝道协同汇入技术未对协同汇入的情景和策略进行较为明确和全面的分类讨论,协同汇入决策规划策略不能针对不同的情景实现有效性的规划决策,导致无法实现全网联环境下的车辆自动安全协同汇入。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种全网联环境下智能车辆协同汇入决策规划方法及系统,实现了智能网联车辆在不同情景下的协同汇入,提高了智能车辆决策规划系统对于不同匝道汇入情景的适应性。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划方法。
4、一种全网联环境下智能车辆协同汇入决策规划方法,应用于主线右侧车队上下游共同扩大汇入间隙的场景,包括以下过程:
5、以匝道车辆到达合流点的动态到达时间为变量,使得匝道车辆在动态到达时间之后,以主线右侧车道上的期望速度到达合流点时,匝道车辆的汇入间隙前车和汇入间隙后车分别与匝道车辆具有假定的相等的距离,得到动态到达时间;
6、根据得到的动态到达时间,使得匝道车辆的汇入间隙前车与汇入间隙后车与匝道车辆具有设定安全距离,得到汇入间隙前车与汇入间隙后车在动态到达时间之后的规划位置;
7、根据动态到达时间、期望速度以及各车辆的规划位置进行各车辆的最优轨迹规划。
8、作为本发明第一方面进一步的限定,根据通过合流点的顺序序列确定汇入间隙前车和汇入间隙后车,顺序序列的确定,包括:
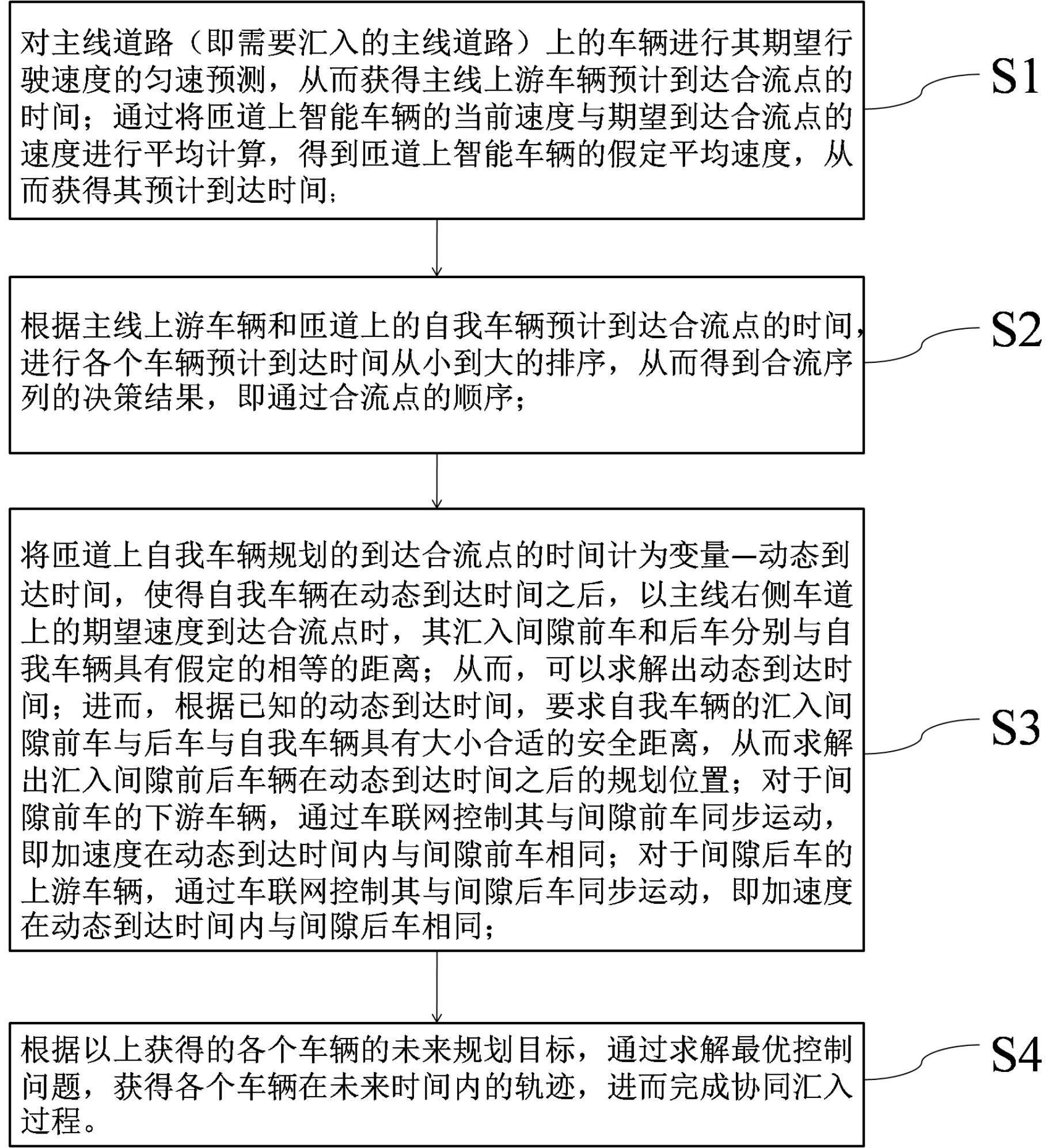
9、对主线道路上的车辆进行期望行驶速度的匀速预测,得到主线上游车辆预计到达合流点的时间;
10、将匝道车辆的当前速度与期望到达合流点的速度进行平均计算,得到匝道车辆的假定平均速度,根据所述假定平均速度得到匝道车辆预计到达合流点的时间;
11、根据主线上游车辆预计到达合流点的时间和匝道车辆预计到达合流点的时间,进行各个车辆预计到达时间从小到大的排序,得到通过合流点的顺序序列。
12、作为本发明第一方面进一步的限定,控制汇入间隙前车的下游车辆与汇入间隙前车的加速度在动态到达时间内与间隙前车相同,控制汇入间隙后车的上游车辆的加速度在动态到达时间内与汇入间隙后车相同;
13、根据动态到达时间、匝道车辆的当前速度、期望速度以及汇入点的位置,进行匝道车辆的最优轨迹控制;
14、根据动态到达时间、汇入间隙后车的规划位置以及期望速度,进行汇入间隙后车的最优轨迹控制;
15、根据动态到达时间、汇入间隙前车的规划位置以及期望速度,进行汇入间隙前车的最优轨迹控制。
16、第二方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划系统。
17、一种全网联环境下智能车辆协同汇入决策规划系统,应用于主线右侧车队上下游共同扩大汇入间隙,包括:
18、动态到达时间计算模块,被配置为:以匝道车辆到达合流点的动态到达时间为变量,使得匝道车辆在动态到达时间之后,以主线右侧车道上的期望速度到达合流点时,匝道车辆的汇入间隙前车和汇入间隙后车分别与匝道车辆具有假定的相等的距离,得到动态到达时间;
19、规划位置生成模块,被配置为:根据得到的动态到达时间,使得匝道车辆的汇入间隙前车与汇入间隙后车与匝道车辆具有设定安全距离,得到汇入间隙前车与汇入间隙后车在动态到达时间之后的规划位置;
20、最优轨迹控制模块,被配置为:根据动态到达时间、期望速度以及各车辆的规划位置进行各车辆的最优轨迹规划。
21、第三方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划方法。
22、一种全网联环境下智能车辆协同汇入决策规划方法,应用于仅主线右侧车队上游扩大汇入间隙的场景,包括以下过程:
23、以匝道车辆到达合流点的动态到达时间为变量,使汇入间隙前车在动态到达时间到达刚好与合流点有设定车头时距,进而得到动态到达时间;
24、当匝道车辆在动态到达时间到达合流点时,汇入间隙后车的规划位置与合流点具有设定车头时距,进而得到汇入间隙后车的规划位置;
25、根据动态到达时间、期望速度以及各车辆的规划位置进行各车辆的最优轨迹规划。
26、作为本发明第三方面进一步的限定,根据通过合流点的顺序序列确定汇入间隙前车,顺序序列的确定,包括:
27、对主线道路上的车辆进行期望行驶速度的匀速预测,得到主线上游车辆预计到达合流点的时间;
28、将匝道车辆的当前速度与期望到达合流点的速度进行平均计算,得到匝道车辆的假定平均速度,根据所述假定平均速度得到匝道车辆预计到达合流点的时间;
29、根据主线上游车辆预计到达合流点的时间和匝道车辆预计到达合流点的时间,进行各个车辆预计到达时间从小到大的排序,得到通过合流点的顺序序列。
30、作为本发明第三方面进一步的限定,控制汇入间隙后车的上游车辆的加速度在动态到达时间内与汇入间隙后车相同;
31、根据动态到达时间、匝道车辆的当前速度、期望速度以及汇入点的位置,进行匝道车辆的最优轨迹控制;根据动态到达时间、汇入间隙后车的规划位置以及期望速度,进行汇入间隙后车的最优轨迹控制。
32、第四方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划系统。
33、一种全网联环境下智能车辆协同汇入决策规划系统,应用于仅主线右侧车队上游扩大汇入间隙的场景,包括:
34、动态到达时间计算模块,被配置为:以匝道车辆到达合流点的动态到达时间为变量,使汇入间隙前车在动态到达时间到达刚好与合流点有设定车头时距,进而得到动态到达时间;
35、主线道路车辆规划模块,被配置为:当匝道车辆在动态到达时间到达合流点时,汇入间隙后车的规划位置与合流点具有设定车头时距,进而得到汇入间隙后车的规划位置;
36、最优轨迹控制模块,被配置为:根据动态到达时间、期望速度以及各车辆的规划位置进行各车辆的最优轨迹规划。
37、第五方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划方法。
38、一种全网联环境下智能车辆协同汇入决策规划方法,应用于主线间隙后车向左换道的场景,包括以下过程:
39、获取主线左侧车道车队的期望速度,设定汇入间隙后车的换道时间为动态到达时间,根据汇入间隙后车的最大加速度、主线左侧车道车队的期望速度、加速度系数以及汇入间隙后车的初始速度,得到动态到达时间;
40、根据动态到达时间、汇入间隙后车的初始位置、主线左侧车道车队的期望速度以及汇入间隙后车的初始速度,得到间隙后车预期换道终点位置;在动态到达时间之后,将与间隙后车预期换道终点位置距离最近的主线左侧车道间隙中点纵向位置,作为间隙后车在动态到达时间的规划位置;
41、根据动态到达时间、期望速度以及各车辆的规划位置进行各车辆的最优轨迹规划。
42、作为本发明第五方面进一步的限定,根据通过合流点的顺序序列确定汇入间隙后车,顺序序列的确定,包括:
43、对主线道路上的车辆进行期望行驶速度的匀速预测,得到主线上游车辆预计到达合流点的时间;
44、将匝道车辆的当前速度与期望到达合流点的速度进行平均计算,得到匝道车辆的假定平均速度,根据所述假定平均速度得到匝道车辆预计到达合流点的时间;
45、根据主线上游车辆预计到达合流点的时间和匝道车辆预计到达合流点的时间,进行各个车辆预计到达时间从小到大的排序,得到通过合流点的顺序序列。
46、作为本发明第五方面进一步的限定,间隙后车的上游车辆和下游车辆均保持原期望速度匀速行驶;
47、根据动态到达时间、匝道车辆的当前速度、到达汇入点的期望以及汇入点的位置,进行匝道车辆的最优轨迹控制;
48、根据动态到达时间、汇入间隙后车的规划位置以及最终期望速度,进行汇入间隙后车的最优轨迹控制。
49、第六方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划系统。
50、一种全网联环境下智能车辆协同汇入决策规划系统,应用于主线间隙后车向左换道的场景,包括:
51、动态到达时间计算模块,被配置为:获取主线左侧车道车队的期望速度,设定汇入间隙后车的换道时间为动态到达时间,根据汇入间隙后车的最大加速度、主线左侧车道车队的期望速度、加速度系数以及汇入间隙后车的初始速度,得到动态到达时间;
52、间隙后车规划控制模块,被配置为:根据动态到达时间、汇入间隙后车的初始位置、主线左侧车道车队的期望速度以及汇入间隙后车的初始速度,得到间隙后车预期换道终点位置;在动态到达时间之后,将与间隙后车预期换道终点位置距离最近的主线左侧车道间隙中点纵向位置,作为间隙后车在动态到达时间的规划位置;
53、最优轨迹控制模块,被配置为:根据动态到达时间、期望速度以及各车辆的规划位置进行各车辆的最优轨迹规划。
54、第七方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划方法。
55、一种全网联环境下智能车辆协同汇入决策规划方法,应用于匝道车辆,包括以下过程:
56、获取主线车道上的交通流信息,判定当前主线道路的场景;
57、在主线右侧车队上下游共同扩大汇入间隙的场景下,执行本发明第一方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程;
58、在仅主线右侧车队上游扩大汇入间隙的场景下,执行本发明第三方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程;
59、在主线间隙后车向左换道的场景下,执行本发明第五方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程。
60、第八方面,本发明提供了一种全网联环境下智能车辆协同汇入决策规划系统。
61、一种全网联环境下智能车辆协同汇入决策规划系统,应用于匝道车辆,包括:
62、数据获取模块,被配置为:获取主线车道上的交通流信息,判定当前主线道路的场景;
63、第一场景决策模块,被配置为:在主线右侧车队上下游共同扩大汇入间隙的场景下,执行本发明第一方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程;
64、第二场景决策模块,被配置为:在仅主线右侧车队上游扩大汇入间隙的场景下,执行本发明第三方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程;
65、第三场景决策模块,被配置为:在主线间隙后车向左换道的场景下,执行本发明第五方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程。
66、第九方面,本发明提供了一种全网联环境下智能车辆。
67、一种全网联环境下智能车辆,所述智能车辆包括有控制器,控制器用于根据获取到的交通路信息,判定当前主线道路的场景;
68、在主线右侧车队上下游共同扩大汇入间隙的场景下,执行本发明第一方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程;
69、在仅主线右侧车队上游扩大汇入间隙的场景下,执行本发明第三方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程;
70、在主线间隙后车向左换道的场景下,执行本发明第五方面所述的全网联环境下智能车辆协同汇入决策规划方法的过程。
71、第十方面,本发明提供了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面、第三方面、第五方面或者第七方面所述的全网联环境下智能车辆协同汇入决策规划方法中的步骤。
72、第十一方面,本发明提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面、第三方面、第五方面或者第七方面所述的全网联环境下智能车辆协同汇入决策规划方法中的步骤。
73、与现有技术相比,本发明的有益效果是:
74、1、本发明创新性的提出了一种全网联环境下智能车辆协同汇入决策规划方法及系统,实现了智能网联车辆在不同情景下的协同汇入,基于动态到达时间对协同汇入的情景和策略进行较为明确和全面的分类讨论,实现了各个智能车辆变速机动参数的优化计算,提高了智能车辆决策规划系统对于不同匝道汇入情景的精度和安全性。
75、2、本发明创新性的提出了一种全网联环境下智能车辆协同汇入决策规划方法及系统,能够应用于主线右侧车队上下游共同扩大汇入间隙、仅主线右侧车队上游扩大汇入间隙或者主线间隙后车向左换道的不同情景,实现了不同场景的汇入精准控制,提高了智能车辆决策规划系统对于不同匝道汇入情景的适应性。
- 还没有人留言评论。精彩留言会获得点赞!