双向两车道无信号交叉路口的车辆调度方法及系统
本发明涉及智能交通,具体地,涉及一种基于队列模型的双向两车道无信号交叉路口的车辆调度方法及系统,尤其涉及一种双向两车道无信号交叉路口的车辆调度方法及系统。
背景技术:
1、智能汽车的发展是衡量一个国家科研实力和工业水平的重要标志。智能交通技术利用先进的电子与信息技术控制智能车辆行驶,让驾驶活动中常规的、持久且疲劳的操作自动完成。而在智能交通系统领域,无信号交叉路口是一个重要的研究领域。传统的交叉路口通常依赖信号灯来控制车辆的通行,但信号灯的调度容易导致交通堵塞和延误。因此,研究无信号交叉路口的车辆调度方法对于提高交通效率具有重要意义。
2、过去的研究中,一些方法通过建立车辆冲突关系图来进行交通调度,但往往无法充分考虑交叉口的实际情况。此外,另一些方法通过遗传算法等优化算法来进行交通调度,但计算复杂度较高且实时性较差。
3、因此,需要提出一种能够兼顾车辆优先级和交叉口实际情况的无信号交叉路口车辆调度方法,以提高交通效率和降低事故发生概率。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种双向两车道无信号交叉路口的车辆调度方法及系统。
2、根据本发明提供的一种双向两车道无信号交叉路口的车辆调度方法及系统,所述方案如下:
3、第一方面,提供了一种双向两车道无信号交叉路口的车辆调度方法,所述方法包括:
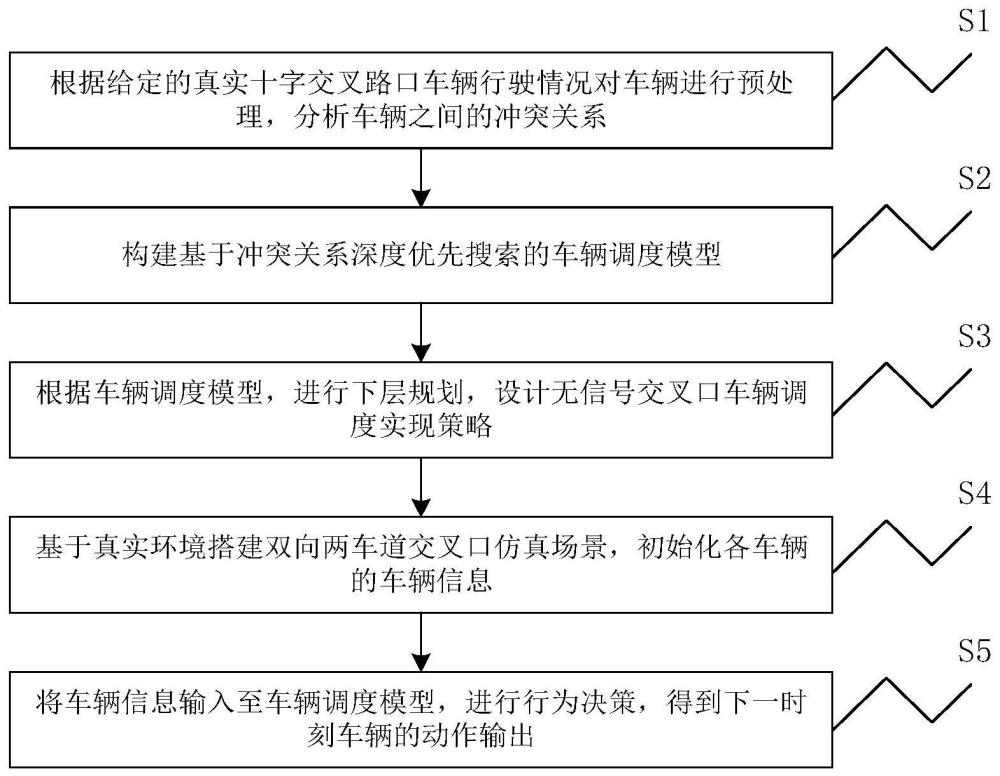
4、步骤s1:根据给定的真实双向两车道十字交叉路口车辆行驶情况对车辆进行预处理,判断车辆之间是否会发生碰撞,分析车辆间的冲突关系;
5、步骤s2:构建基于冲突关系深度搜索的车辆调度模型;
6、步骤s3:利用非线性规划实现车辆的行动决策,求出最优通过时间及车辆行驶加速度;根据车辆调度模型,进行下层规划,设计无信号交叉口车辆调度实现策略;
7、步骤s4:根据给定的真实十字交叉路口场景搭建十字交叉路口仿真场景,初始化各车辆的车辆信息;
8、步骤s5:将所述车辆信息输入至车辆调度模型,进行行为决策,得到下一时刻各车辆的动作输出。
9、优选地,所述步骤s1中,车辆预处理包括对车辆约束条件设置,设计依照车辆距离交叉口中心点距离排序的队列;
10、在双向两车道的场景模型下,当前十字路口车辆冲突关系包括,交叉关系:交叉路口东方向的直行与北方向的左转冲突关系;发散关系:交叉路口东方向的直行与东方向的左转冲突关系;收敛关系:西方向的直行与南方向的左转冲突关系;其余东、西、北方向冲突点依据交叉路口中心分别对以上冲突路线做90°、180°、270°旋转得到;冲突集由交叉关系、发散关系、收敛关系的并集产生;
11、在双向两车道的场景模型下,车辆的约束条件包括:车辆行驶最低速度0km/h,最大速度30km/h,最小加速度-1.5m/s2,最大加速度1.0m/s2,最小车间距15m。
12、优选地,所述步骤s2中,基于冲突关系深度搜索的车辆调度模型,具体包括:首先,使用矩阵理论实现车辆间冲突关系的构建;其次,利用深度搜索树算法实现车辆进入交叉路口的次序,使队列中车辆不产生冲突关系,速度、间距在安全范围内行驶。
13、优选地,所述步骤s2中,矩阵结构为
14、其中,处于交叉路口的队列中车辆数为n,矩阵中每个元素为aij,当aij=1时表示车辆j对车辆i有着冲突关系,当aij=0时表示车辆j对车辆i不存在冲突关系;
15、由于冲突关系是有向的,因此该邻接矩阵并非对称矩阵;其中i,j=0,1,2,…,n,当i,j=0时该车为仅作为引导的虚拟头车,其余为从车。
16、优选地,所述步骤s2具体步骤如下:
17、步骤s201:将交叉口范围内的行驶车辆依照距离交叉口中心点位置依次排序,距离交叉口中心点越近的车辆排在前面;根据排序结果,形成一个有序的车辆队列,按照车辆在排序中的位置进行编号,形成从1号车到n号车的队列模型;设置编号为0的虚拟头车,表示交叉口的中心点;
18、步骤s202:当车辆ci进入交叉口控制范围内,判断前方车辆规划是否完成,若未完成,执行步骤s203;若完成,则判定车辆ci前方车辆冲突关系,选取编号最大的车辆作为ci的前导车辆;
19、步骤s203:从虚拟头车开始,选择一个未被访问的车辆作为根节点,根据当前节点的冲突关系矩阵中的元素,通过深度优先搜索理论,确定对根节点车辆具有冲突关系的车辆作为子节点,将不存在冲突关系的同一深度下的车辆组成具有优先级的交叉口通行队列,越接近根节点的车辆队列优先级越高;
20、步骤s204:对于每个可选的下一步车辆/子节点,检查其冲突关系矩阵与同一优先级队列下的已选车辆的冲突情况,如果不存在冲突,则将该车辆加入同一深度下的车辆行驶队列中,将队列中编号最大的车辆设为根节点,执行步骤s203;
21、步骤s205:在访问过程中,若某根节点车辆无子节点,则将同一优先级队列中其他车辆设置为根节点,执行步骤s203;
22、步骤s206:在访问过程中,若某根节点车辆无子节点,且不存在同一优先级队列中其他车辆,访问来到上一优先级队列中,直到所有车辆组队完毕;
23、步骤s207:通过深度优先搜索算法得到的优先级队列即为车辆进入交叉路口的次序,优先级较高队列先进入交叉口,同一优先级车辆需确保同时经过交叉口中心点。
24、优选地,所述步骤s3中,利用非线性规划实现车辆的行动决策,具体包括以下步骤:
25、步骤s301:利用非线性规划计算每辆车通行的最优加速度;
26、步骤s302:计算每辆车从初始速度加速到最大速度所需的时间及行驶距离;对于求解同一深度矩阵下车辆通过交叉路口的最优时间,依据交叉路口约束条件与匀加速状态下位移-时间公式:
27、
28、其中,d表示车辆距离交叉口距离,v0表示车辆行驶初始速度,a表示需要求解的加速度,t为车辆行驶时间;
29、步骤s303:检查车辆是否在达到最大速度前就能到达交叉路口:如果车辆行驶的距离已经大于等于初始距离,则直接使用二次方程求解公式计算车辆到达交叉口的时间;若车辆行驶的距离小于目标距离,则计算以最大速度行驶的剩余距离,并计算在最大速度下行驶剩余距离所需的时间;
30、步骤s304:调用深度矩阵,比较同一优先级队列下车辆行驶时间,求解最大时间;
31、步骤s305:使用该时间作为目标,利用二次方程求解公式,计算同一队列中各车辆通过交叉口最优加速度值。
32、优选地,所述步骤s4仿真场景中的车辆信息存在车辆速度、加速度、预计行驶路线以及位置信息;
33、仿真场景中还包括车道地理信息,具体为各个方向的进口车道、出口车道以及冲突行为关系;所述进口车道划分为交叉口优先级队列控制区以及交叉口中心区;所述出口车道包括优先级队列解散区。
34、优选地,所述步骤s5包括:
35、定义每辆车的唯一标识符,并指定车辆的行驶路线,包括经过的道路和交叉口;模拟车辆的到达情况,将车辆通行设置为泊松分布,为实现车辆的调度和交通流模拟,对调度周期进行处理,调度周期的计算公式如下:
36、
37、
38、
39、其中,t代表调度时间;di表示车辆离交叉口中心距离;s1表示车辆最大速度下的位移距离;s2表示车辆最小速度下的位移距离;vmax表示车辆行驶的最大速度;vmin表示车辆行驶的最小速度;通过以上的处理,车辆调度模型根据车辆的唯一标识符和行驶路线,结合车辆到达的泊松分布模拟和调度周期的计算,准确模拟车辆的行驶和交通流情况。
40、优选地,所述步骤s5中,输出下一时刻各车辆的动作,具体包括:调用某时间步下的车辆等待时间、等待车辆数、通过车辆数在内的相关信息;在东、西、南、北四个进口道中安装环境传感器与车流量传感器,读取车辆占有率、车流量信息、co2排放量、燃油排放量信息;接口步骤s3中实现的车辆行动决策模型,每隔一个调度时间步对车辆进行调度,车队按照优先级大小通行,设定高优先级车队与低优先级车辆进行交叉口的时间间隔,消解冲突并减小停车等待时间。
41、第二方面,提供了一种双向两车道无信号交叉路口的车辆调度系统,该系统包括智能车辆调度系统和车辆速度加速度计算控制单元,对于所有队列中的车辆,都具有v2x通讯功能;
42、所述智能车辆调度系统计算控制单元对于车辆的控制以及基于深度优先搜索树进行编队组队和编队运动控制;
43、所述车辆速度加速度计算控制单元获取车辆队列信息,基于车辆基础信息与队列优先级对车辆进行实时调度规划。
44、与现有技术相比,本发明具有如下的有益效果:
45、1、融合车辆队列和智能调度系统:本发明将车辆队列的一致性和高效性与智能调度系统相结合,通过分析车道车辆行驶方向的冲突关系,并利用深度优先搜索方法,将车辆组合成优先级队列。这种融合使车辆能够以有序的方式通过交叉路口,并显著提高道路空间利用率和车辆通行效率。此外,该方法具有低复杂度和强实时性,后续进入交叉口控制区域的车辆无需重复计算,减轻了系统的通信和计算压力;
46、2、实时运算获取最优解:本发明基于车辆深度优先搜索,通过实时运算和实时数据,获取车辆通行过程中的最优解。考虑到车辆行驶状态的动态性和轨迹的变化,该算法能够实时调整优先级队列,使车辆通行效果最优;
47、3、基于优先级车队模型的通行序列计算:本发明采用优先级车队模型对各个优先级队列进行通行序列的计算,使计算更加合理和精确。通过实时获取交叉路口区域车辆的队列信息,并使用该模型进行冲突预测和通行优先级的确定,系统具备更强的实时性;
48、4、非线性规划和速度引导:本发明采用非线性规划和同时态车辆速度规划算法,为交叉口控制区域的车辆提供建议速度引导。结合路口实时状况和各方向编队信息,以及碰撞冲突的位置和时间,该算法能够有效消解冲突,同时减少通行车辆的停车等待时间,提升通行的舒适性。
49、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
- 还没有人留言评论。精彩留言会获得点赞!