强化道路周边空间特征的异质图交通预测方法及系统
本申请涉及交通预测,尤其涉及一种强化道路周边空间特征的异质图交通预测方法及系统。
背景技术:
1、当前对于交通信息的预测通常有三类方法。第一类把交通预测问题当作纯粹的时间序列预测问题,在道路图结构的基础上仅仅进行时间序列预测而忽略了交通状况的空间依赖性。
2、第二类方法为了更好地在限定空间范围内预测未来交通情况,引入传感器位置或者道路的空间特征作为表示学习的一部分。但是,这类方法虽然能够考虑道路自身的时空信息,但是忽略了道路周边空间信息对于交通预测任务的影响。
3、第三类是关注道路周边空间信息的交通预测方法。在这一类方法中,最传统的做法是借助arcgis等软件进行分析,以增强空间视角。但是这类方法目前在提取交通特征时很少充分利用现有时间序列和空间特征的学习思路,而更侧重于空间信息的特征变化。总体来说,考虑道路周边空间信息的方法通常停留在软件分析或人工规则筛选的层面,很少将时空网络模型的优势融入到整体的端到端学习和分析模型中。
4、依照上述三类方法进行交通预测都有一定的局限性,难以实现交通信息的准确预测。
技术实现思路
1、本申请提供一种强化道路周边空间特征的异质图交通预测方法及系统,可以实现交通信息的准确预测。
2、第一方面,本申请实施例提供一种强化道路周边空间特征的异质图交通预测方法,包括:
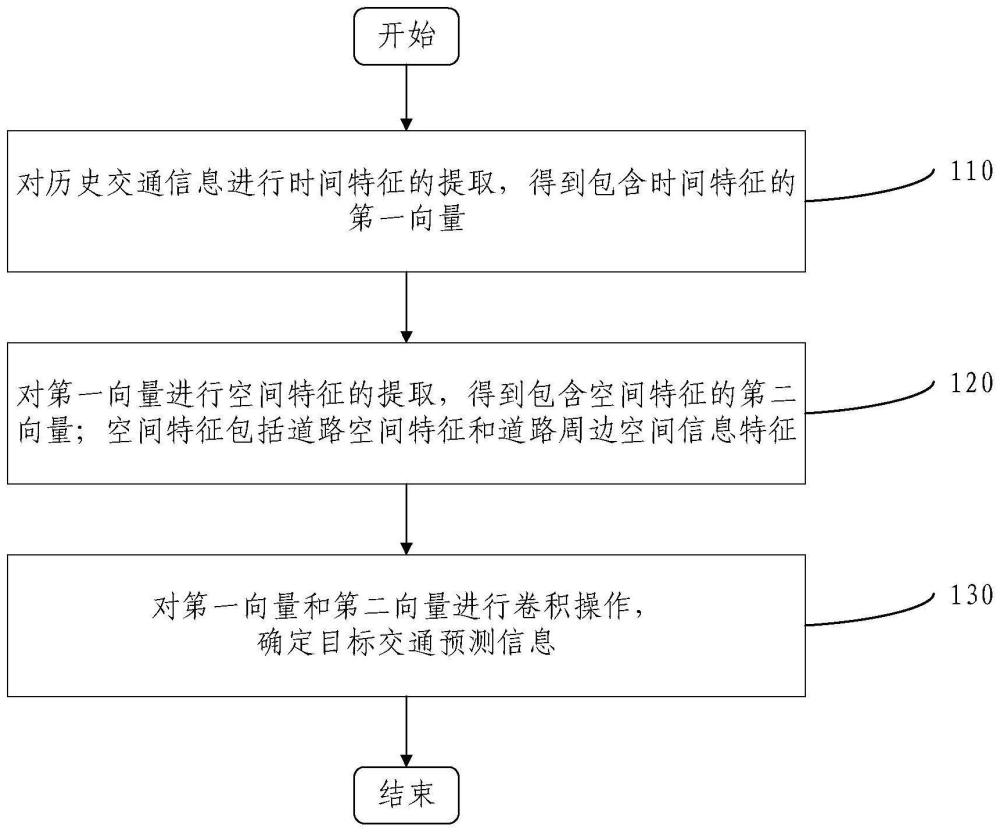
3、对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量;
4、对所述第一向量进行空间特征的提取,得到包含空间特征的第二向量;所述空间特征包括道路空间特征和道路周边空间信息特征;
5、对所述第一向量和所述第二向量进行卷积操作,确定目标交通预测信息。
6、在一个实施例中,对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量,包括:
7、对历史交通信息进行第一因果卷积,确定包含时间特征的第三向量;并对历史交通信息进行第二因果卷积,确定第三向量信息传递比例;
8、基于所述第三向量和所述第三向量信息传递比例,确定所述第一向量。
9、在一个实施例中,对所述第一向量进行空间特征的提取,得到包含空间特征的第二向量,包括:
10、基于所述第一向量包含的节点信息和预设元路径,确定交通异质图;
11、基于交通异质图对所述第一向量进行自注意力机制的深度神经网络学习提取空间特征,得到包含空间特征的所述第二向量。
12、在一个实施例中,基于交通异质图对所述第一向量进行自注意力机制的深度神经网络学习提取空间特征,得到包含空间特征的所述第二向量,包括:
13、基于交通异质图对所述第一向量进行自注意力机制的深度神经网络学习,确定节点对之间的权重重要性;
14、对节点对之间的权重重要性进行聚合得到聚合结果;
15、基于所述聚合结果确定包含空间特征的所述第二向量。
16、在一个实施例中,对所述第一向量和所述第二向量进行卷积操作,确定目标交通预测信息,包括:
17、基于所述第一向量和所述第二向量确定残差结构;
18、对所述残差结构进行二维卷积得到第四向量;
19、对所述第四向量进行第三因果卷积,确定包含时空特征的第五向量;并对所述第四向量进行第四因果卷积,确定第五向量信息传递比例;
20、基于所述第五向量和所述第五向量信息传递比例,确定目标交通预测信息。
21、在一个实施例中,将目标交通预测信息作为历史交通信息,再次对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量;
22、再次对所述第一向量进行空间特征的提取,得到包含空间特征的第二向量;
23、再次对所述第一向量和所述第二向量进行卷积操作,确定目标交通预测信息;
24、循环执行上述时间特征提取、空间特征的提取,以及卷积操作一次或多次,将最后一次循环确定的目标交通预测信息作为最终的交通预测信息。
25、第二方面,本申请实施例提供一种强化道路周边空间特征的异质图交通预测系统,包括:
26、第一提取模块,用于对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量;
27、第二提取模块,用于对所述第一向量进行空间特征的提取,得到包含空间特征的第二向量;所述空间特征包括道路空间特征和道路周边空间信息特征;
28、确定模块,用于对所述第一向量和所述第二向量进行卷积操作,确定目标交通预测信息。
29、第三方面,本申请还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法。
30、第四方面,本申请还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面所述的方法。
31、第五方面,本申请还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第一方面所述的方法。
32、本申请实施例提供的强化道路周边空间特征的异质图交通预测方法及系统,基于历史交通信息进行时间特征、道路空间特征和道路周边空间信息特征的提取,然后基于提取的时空特征进行卷积操作来预测交通信息,可以综合多源时空特征来进行交通信息的预测,可以提高交通信息预测的准确性。
技术特征:
1.一种强化道路周边空间特征的异质图交通预测方法,其特征在于,包括:
2.根据权利要求1所述的强化道路周边空间特征的异质图交通预测方法,其特征在于,对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量,包括:
3.根据权利要求1所述的强化道路周边空间特征的异质图交通预测方法,其特征在于,对所述第一向量进行空间特征的提取,得到包含空间特征的第二向量,包括:
4.根据权利要求3所述的强化道路周边空间特征的异质图交通预测方法,其特征在于,基于交通异质图对所述第一向量进行自注意力机制的深度神经网络学习提取空间特征,得到包含空间特征的所述第二向量,包括:
5.根据权利要求1所述的强化道路周边空间特征的异质图交通预测方法,其特征在于,对所述第一向量和所述第二向量进行卷积操作,确定目标交通预测信息,包括:
6.根据权利要求1至5任一项所述的强化道路周边空间特征的异质图交通预测方法,其特征在于,将目标交通预测信息作为历史交通信息,再次对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量;
7.一种强化道路周边空间特征的异质图交通预测系统,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述强化道路周边空间特征的异质图交通预测方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述强化道路周边空间特征的异质图交通预测方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述强化道路周边空间特征的异质图交通预测方法。
技术总结
本申请提供一种强化道路周边空间特征的异质图交通预测方法及系统,涉及交通预测技术领域。所述方法包括:对历史交通信息进行时间特征的提取,得到包含时间特征的第一向量;对所述第一向量进行空间特征的提取,得到包含空间特征的第二向量;所述空间特征包括道路空间特征和道路周边空间信息特征;对所述第一向量和所述第二向量进行卷积操作,确定目标交通预测信息。本申请提供的强化道路周边空间特征的异质图交通预测方法及系统,可以准确预测交通信息。
技术研发人员:杨丽娜,陈嘉辉,彭玲
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!