一种提升自动寻找车位识别率方法、系统及装置与流程
本发明涉及车辆自动控制,具体涉及一种提升自动寻找车位识别率方法、系统及装置。
背景技术:
1、由于汽车数量剧增,“停车难”问题逐渐显现。对于驾驶员来说,经常要面临将车辆停入狭窄停车位置的难题。认为手动开车泊车很少有不费一番周折就停好车的情况,停车可能导致交通阻塞、神经疲惫和保险杆被撞弯等问题;复杂场景判断容易失误,导致驾驶员控制行驶困难、不易应对,容易造成车辆剐蹭甚至更严重事故。目前一些车辆虽然引入了自动泊车系统,提高车辆的智能化水平和安全性,进一步降低了新手司机驾驶车辆的难度。但存在局限性,车位内低矮障碍物或尖锐等物体,超声波无法识别到,导致该车位误释放出来。造成自动泊车卡住或车辆剐蹭。即目前车位误释放问题依然普通存在。
技术实现思路
1、针对现有技术存在的问题,本发明的目的在于提供一种提升自动寻找车位识别率方法、系统及装置,其通过引入影像感知结果,并将影像感知结果和超声波感知结果进行融合处理,从而确认车位内是否真正不存在障碍物,从而释放出有效目标车位,提高寻找车位识别率。
2、为实现上述目的,本发明采用的技术方案是:
3、一种提升自动寻找车位识别率方法,所述方法包括以下步骤:
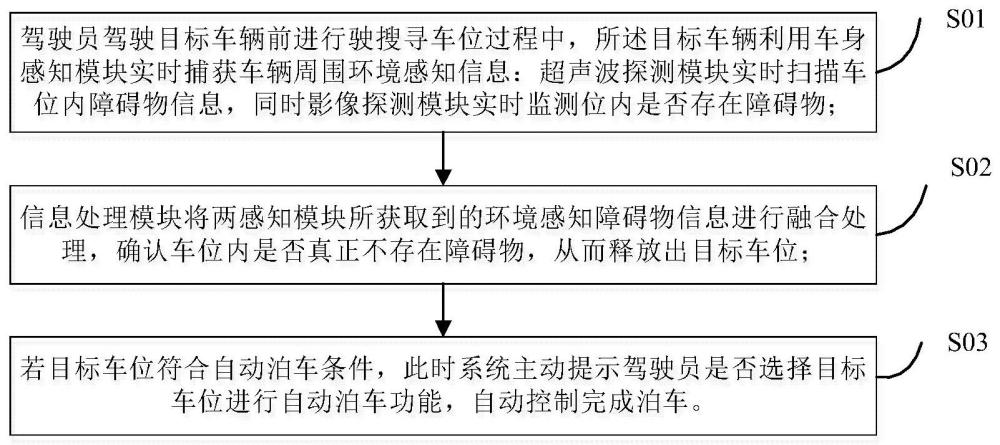
4、步骤s01:驾驶员驾驶目标车辆前进行驶搜寻车位过程中,目标车辆实时捕获车辆周围环境感知信息:通过超声波探测模块实时扫描车位内障碍物信息,同时通过影像探测模块实时检测车位内是否存在障碍物;
5、步骤s02:通过信息处理模块将超声波探测模块和影像探测模块获取到的环境感知障碍物信息进行融合处理,确认车位内是否真正不存在障碍物,从而释放出目标车位;
6、信息处理模块确认车位内是否真正不存在障碍物如下:
7、(1)超声波探测模块没有探测到障碍物,影像探测模块没有探测到障碍物,则确认为该车位有效;
8、(2)超声波探测模块没有探测到障碍物,影像探测模块有探测到障碍物,则确认为该车位无效;
9、(3)超声波探测模块有探测到障碍物且障碍物轮廓大于预设轮廓,且影像探测模块没有探测到障碍物,则确认为该车位无效;
10、(4)超声波探测模块有探测到障碍物且障碍物轮廓小于预设值,且影像探测模块没有探测到障碍物,则确认为该车位有效;
11、(5)超声波探测模块有探测到障碍物,影像探测模块有探测到障碍物,则确认为该车位无效;
12、车位有效时,则确认为车位内不存在障碍物,释放出目标车位;
13、步骤s03:若目标车位符合自动泊车条件,则提示驾驶员是否选择目标车位进行自动泊车功能,当选择自动泊车时,车辆自动控制完成泊车。
14、所述超声波探测模块和影像探测模块探测到障碍物信息时,通过抽象障碍物轮廓位置坐标,得出周围车位边界。
15、一种提升自动寻找车位识别率系统,所述系统包括
16、车身感知模块,用于在目标车辆前进行驶搜寻车位过程中,目标车辆利用车身感知模块实时捕获车辆周围环境感知信息;该车身感知模块包括超声波探测模块和影像探测模块,通过超声波探测模块实时扫描车位内障碍物信息,同时通过影像探测模块实时检测车位内是否存在障碍物;
17、信息处理模块,用于实时信息处理,根据车身感知模块所获取到的环境感知障碍物信息进行处理,确认车位内是否真正不存在障碍物,从而释放出目标车位;
18、确认车位内是否真正不存在障碍物具体如下:
19、(1)超声波探测模块没有探测到障碍物,影像探测模块没有探测到障碍物,则确认为该车位有效;
20、(2)超声波探测模块没有探测到障碍物,影像探测模块有探测到障碍物,则确认为该车位无效;
21、(3)超声波探测模块有探测到障碍物且障碍物轮廓大于预设轮廓,且影像探测模块没有探测到障碍物,则确认为该车位无效;
22、(4)超声波探测模块有探测到障碍物且障碍物轮廓小于预设值,且影像探测模块没有探测到障碍物,则确认为该车位有效,如图6所示;
23、(5)超声波探测模块有探测到障碍物,影像探测模块有探测到障碍物,则确认为该车位无效;
24、车位有效时,则确认为车位内不存在障碍物,释放出目标车位;
25、自动泊车提示模块,用于在释放出目标车位,且目标车位符合自动泊车条件时,提示驾驶员是否选择目标车位进行自动泊车功能,自动控制完成泊车。
26、所述系统包括显示控制模块,用于在目标车辆前进行驶搜寻车位过程中,车辆控制信息输出反馈、提示、及触屏控制系统开关。
27、所述显示控制模块包括用于触发自动泊车开启或停止的按键控制模块。
28、所述超声波探测模块采用安装在车身上的超声波雷达、微波雷达或激光雷达,影像探测模块则采用安装在车身上的环视摄像头。
29、一种提升自动寻找车位识别率装置,包括:处理器和存储器,所述存储器用于存储一个或多个软件程序,所述一个或多个软件程序包括指令,所述指令当被所述处理器执行时使所述处理器执行如上所述的提升自动寻找车位识别率方法。
30、采用上述方案后,驾驶员驾驶目标车辆前进行驶搜寻车位过程中,目标车辆利用超声波探测模块实时探测车位内障碍物信息,同时影像探测模块实时检测车位内是否存在障碍物。然后利用信息处理模块将超声波探测模块和影像探测模块探测到的障碍物信息进行融合处理,确认车内是否真正不存在障碍物,从而释放目标车位。若目标车位符合自动泊车条件,则提示驾驶员是否选择目标车位进行自动泊车功能,当选择自动泊车时,车辆自动控制完成泊车。对于车位内存在小柱子、低矮障碍物、低悬挂横梁等超声波探测模块容易存在误检的情况,本实施例引入影像探测模块进行检测,并根据超声波探测模块和影像探测模块的探测结果,进行综合判断目标车位是否真正有效,提高了找车位识别率即释放率,进而提升了自动泊车的驾驶体验。
技术特征:
1.一种提升自动寻找车位识别率方法,其特征在于:所述方法包括以下步骤:
2.根据权利要求1所述的一种提升自动寻找车位识别率方法,其特征在于:所述超声波探测模块和影像探测模块探测到障碍物信息时,通过抽象障碍物轮廓位置坐标,得出周围车位边界。
3.一种提升自动寻找车位识别率系统,其特征在于:所述系统包括
4.根据权利要求3所述的一种提升自动寻找车位识别率系统,其特征在于:所述系统包括显示控制模块,用于在目标车辆前进行驶搜寻车位过程中,车辆控制信息输出反馈、提示、及触屏控制系统开关。
5.根据权利要求4所述的一种提升自动寻找车位识别率系统,其特征在于:所述显示控制模块包括用于触发自动泊车开启或停止的按键控制模块。
6.根据权利要求3所述的一种提升自动寻找车位识别率系统,其特征在于:所述超声波探测模块采用安装在车身上的超声波雷达、微波雷达或激光雷达,影像探测模块则采用安装在车身上的环视摄像头。
7.一种提升自动寻找车位识别率装置,包括:处理器和存储器,其特征在于:所述存储器用于存储一个或多个软件程序,所述一个或多个软件程序包括指令,所述指令当被所述处理器执行时使所述处理器执行如权利要求1或2所述的提升自动寻找车位识别率方法。
技术总结
本发明涉及一种提升自动寻找车位识别率方法、系统及装置,其在驾驶员驾驶目标车辆前进行驶搜寻车位过程中,利用超声波探测模块实时探测车位内障碍物信息,同时影像探测模块实时检测车位内是否存在障碍物。然后利用信息处理模块将超声波探测模块和影像探测模块探测到的障碍物信息进行融合处理,确认车内是否真正不存在障碍物,从而释放目标车位。对于车位内存在小柱子、低矮障碍物、低悬挂横梁等超声波探测模块容易存在误检的情况,本发明引入影像探测模块进行检测,并根据超声波探测模块和影像探测模块的探测结果,综合判断目标车位是否真正有效,提高了找车位识别率即释放率,进而提升了自动泊车的驾驶体验。
技术研发人员:柯进益,卢至孟,林志聪,李达福
受保护的技术使用者:同致电子科技(厦门)有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!