一种基于意图高度的航空器质量估计方法与流程
本发明涉及一种航空器质量估计方法,特别是一种基于意图高度的航空器质量估计方法。
背景技术:
1、飞机轨迹预测一直是航空运输中许多机载和地面应用的关键问题。随着基于轨迹运行概念的推广,当前的空中交通管理与控制系统正在向基于轨迹运行的方式转变,高精度地预测航空器轨迹已经成为空中交通管理与控制的关键问题。
2、目前,大多数方法都是基于质点模型与航空动力学来进行轨迹预测。这类方法将航空器模拟为一个有质量的点,运用牛顿第二定律进行航空器的受力分析,通过一组微分方程将飞机的推力、阻力、重力与惯性加速度联系起来,在知道航空器初始状态(质量、当前推力设置、位置、速度、倾角等)、大气条件(风力、温度)和飞机意图(推力曲线、速度曲线、航线)的情况下,通过积分运算来获取航空器未来的速度和高度。其中,质量参数是影响轨迹预测准确性的关键参数。由于许多航空公司将航空器质量视为重要的竞争参数,不允许机载端下传质量信息,地面系统无法获取准确的航空器起飞质量,因此目前的通用做法是采用bada提供的参考质量或者通过最小二乘法利用前序航迹点计算估计质量作为航空器质量。bada提供的参考质量是一个固定的数值,由航空器机型决定,不能动态反映不同航空器之间的质量偏差,而通过最小二乘方法计算得到的估计质量,受前序航迹点影响很大,结果波动明显,无法提供稳定的航空器质量。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种基于意图高度的航空器质量估计方法。
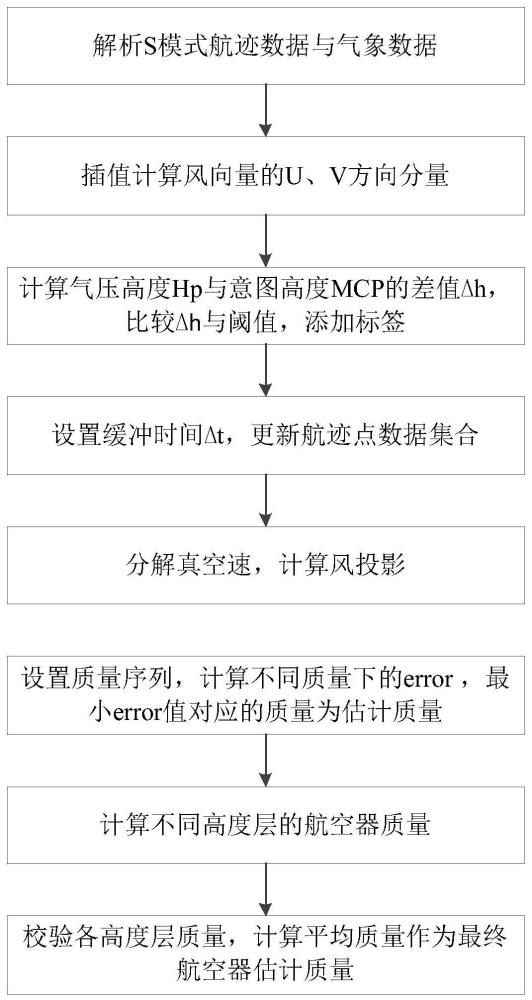
2、为了解决上述技术问题,本发明公开了一种基于意图高度的航空器质量估计方法,包括以下步骤:
3、步骤1,解析目标航空器的s模式雷达数据,得到该航空器在各航迹点的数据集tp={tpi,i=1,2,...,n},其中,tpi为第i个航迹点的数据;
4、解析气象数据,得到气象数据集合wd={windj,j=1,2,...,m},其中,windj表示第j个风向量;
5、步骤2,插值计算航迹点数据tpi对应的uv坐标系中u方向和v方向的风速分量wind_ui和wind_vi;
6、步骤3,设置高度阈值ηh,计算航迹点数据中的气压高度hp与意图高度mcp的高度差值δh,比较高度差值δh与高度阈值ηh的大小,添加缓冲高度标签flag;
7、步骤4,设置缓冲时间δt,根据缓冲时间更新航迹点的数据集合tr;
8、步骤5,分解真空速tas到u方向和v方向,计算风对目标航空器的影响;
9、步骤6,设置质量序列,计算不同质量对应的航空器的功率power、q值以及单位质量下功率power和q值的均方误差error,比较均方误差error数值大小获得目标航空器的估计质量massest;
10、步骤7,设置高度层序列,筛选各个高度层中的的航迹点数据,计算不同高度层对应的航空器估计质量massfl;
11、步骤8,获取目标航空器的最终估计质量:对所有高度层的航空器估计质量massfl进行数值校验,去除异常质量,得到有效质量序列,计算有效质量的平均质量作为目标航空器的最终估计质量。
12、进一步的,步骤1中所述的第i个航迹点的数据tpi,为一个向量,具体如下:
13、tpi=[ti,hpi,mcpi,tasi,θi]
14、其中,ti、hpi、mcpi、tasi和θi分别代表第i个航迹点对应的时间、气压高度、意图高度、真空速和航向角,n为航迹点总数。
15、进一步的,步骤1中所述的第j个风向量windj,具体如下:
16、风向量windj由uv坐标系中的方向u和方向v两个方向的分量组成,记作:
17、windj=(wind_uj,wind_vj)
18、其中,每个方向的风向量都是一个基于时间与空间的四维矢量,分别记作:
19、wind_uj=(tj,lj,lonj,latj)
20、
21、其中,tj、lj、lonj和latj分别表示第j个风向量对应的时间戳、高度层、经度和纬度。
22、进一步的,步骤2中所述的插值计算航迹点数据tpi对应的uv坐标系中u方向和v方向的风速分量wind_ui和wind_vi,具体方法如下:
23、步骤2.1,获取与航迹点数据tpi中的时间ti最近的风向量的时间戳tj对应的时间索引,记作indext;
24、步骤2.2,获取与航迹点数据tpi中的高度hpi最近的风向量的高度层lj对应的索引,其中,最近的上高度层索引记作indexh_top,最近的下高度层索引记作indexh_bottom;
25、步骤2.3,根据时间索引indext与高度层索引indexh_top和indexh_bottom,得到当前高度层下的风向量集合wdl,如下:
26、wdl={windt,l,lon,lat|t=indext,l∈[indexh_top,indexh_bottom]}
27、遍历上述集合中的向量,计算高度层风速windlon,lat,计算方法为:
28、
29、其中,x和y分别表示当前高度层下的风向量windj的经度和纬度,dx,y表示风向量windj与第i个航迹点的距离,windlon,lat为当前高度层下第i个航迹点处的风速,根据上述方法分别计算上下高度层对应的风速wind_toplon,lat和wind_bottomlon,lat;
30、步骤2.3,第i个航迹点的风向量为上下高度风速向量wind_toplon,lat与wind_bottomlon,lat的均值,记作windi=(wind_ui,wind_vi),其中,wind_ui和wind_vi表示其在u方向和v方向上的分量。
31、进一步的,步骤3中所述的添加缓冲高度标签flag的具体方法为:
32、比较高度差值δg与高度阈值ηh的大小,如果δh<ηh,则判定为异常航迹高度数据,添加缓冲高度标签flag为0,否则判定为正常航迹高度数据,添加缓冲高度标签flag为1。
33、进一步的,步骤4中殴的根据缓冲时间δt更新航迹点的数据集合tr,具体方法为:
34、步骤4.1,设置前向缓冲时间δtforward,找到航迹数据集中缓冲高度标签为0的航迹点数据tpi,移该除航迹点向前δtforward个数据,得到新的航迹点的数据集tp′={tpi,i=1,2,...,n′},且n′≤n;
35、步骤4.2,设置后向缓冲时间δtbackward,找到新的航迹数据集tp′中缓冲高度标签为0的航迹点tpi,移除该航迹点向后δtbackward个数据,得到新的航迹点的数据集tp″={tpi,i=1,2,...,n″},且n″≤n′≤n。
36、进一步的,步骤5中所述的计算风对目标航空器的影响,具体过程为:
37、步骤5.1,在新的航迹点数据集tp″中,分解航迹点数据tpi中的真空速tasi到u方向和v方向,方法如下:
38、
39、其中,真空速tasi在u方向上的分量记作tas_ui,真空速tasi在v方向上的分量记作tas_vi;
40、步骤5.2,计算风对目标航空器的影响effecti,方法如下:
41、effecti=(wind_ui+1-wind_ui)tas_ui+(wind_vi+1-wind_vi)tas_vi
42、其中,wind_ui+1和wind_ui为当前航空器在ti+1和ti时刻的u方向上的风速分量,wind_vi+1和wind_vi为当前航空器在ti+1和ti时刻的v方向上的风速分量。
43、进一步的,步骤6中所述的获得目标航空器的估计质量massest,具体过程如下:
44、步骤6.1,根据bada性能模型获取目标航空器的最小质量massmin与最大质量massmax,在质量区间[massmin×ηmin,massmax×ηmax]内线性插值k个质量数值,其中,ηmin和ηmax分别是质量上限阈值和质量下限阈值,得到质量序列ma={massk,k=1,2,...k},其中,massk表示该序列中的第k个质量;
45、步骤6.2,遍历质量序列,分别计算质量序列中每个质量对应的功率power与q值,根据bada性能模型,计算航迹点数据tpi对应的功率power与q值,记作poweri(massk)与qi(massk);
46、步骤6.3,计算第k个质量massk时全部航迹点的均方误差errork,方法如下:
47、
48、其中,tpi∈tr″,得到massk对应的均方误差序列error={errork,k=1,2,...,k},其中,errork数值最小对应的质量就是目标航空器的估计质量massest。
49、进一步的,步骤7中所述的计算不同高度层对应的航空器估计质量massfl,具体方法如下:
50、步骤7.1,设置航空器的最低飞行高度层fllow与最低飞行高度层flhigh,在高度层区间[fllow,flhigh]内线性插值z个高度层数值,得到高度层序列fl={flz,z=1,2,...z},其中,flz表示第z个高度层;
51、步骤7.2,遍历该高度层序列,比较航迹点数据tpi中的高度hpi与高度层flz,找到最近的高度对应的航迹点索引indexfl;
52、步骤7.3,计算航迹点索引indexfl前k个质量massk对应的全部航迹点的均方误差errork,方法如下:
53、
54、得到对应高度层的航空器估计质量massfl,以及所有高度层下的航空器估计质量集合m={massfl,fl∈fl}。
55、进一步的,步骤8中所述的获取目标航空器的最终估计质量,具体过程如下:
56、步骤8.1,对航空器估计质量集合m={massfl,fl∈fl}中的每个数值进行合理性校验,包括:去除空数值,删除超出[massmin,massmax]质量区间的数值,得到航空器的有效估计质量集合m′={massfl,fl∈fl′};
57、步骤8.2,计算有效估计质量集合m′中全部质量的平均质量mass=average{massfl|fl∈fl′},该平均质量mass即为目标航空器的最终估计质量。
58、有益效果:
59、本发明充分考虑风速对航空器质量估计结果的影响,根据意图高度与高度缓冲时间对航迹点过滤,可以剔除影响质量结果的异常航迹点,通过实施多高度层的航空器质量估计,获得更加稳定的航空器估计质量。
- 还没有人留言评论。精彩留言会获得点赞!