一种炸礁船航道通航信号控制系统及实现方法与流程
本发明涉及通航信号控制,具体为一种炸礁船航道通航信号控制系统及实现方法。
背景技术:
1、炸礁船:装有多台可移动的钻岩机,在清理航道时,为爆破礁石进行钻孔、装药和引爆用的船;炸礁船沿着航道运行时,航道内也会有其他船只运行,导致炸礁船不能正常运行,因此需要对炸礁船航道通航情况进行控制。
2、公开号为cn202855082u的中国专利公开了一种内河航道控制河段通行信号揭示无线控制装置,采用无线通信电路技术,连接信号揭示控制器与信号驱动控制器,通过无线通信模块,系统无需布线,安装方便,可以随时更换位置,大大简化信号切换过程,采用串行通信接口以及甚高频电话控制接口,可通过连接智能自动揭示系统和甚高频电话,实现控制河段信号“自动揭示与通行辅助指挥”功能。但是上述专利在实际使用过程中存在以下缺陷:
3、现有的炸礁船沿着航道运行时,不能对航道通航的炸礁船进行有效的通航控制,导致炸礁船航道通航受阻,影响了炸礁船的正常通航,使得炸礁船航道通航效率低下。
技术实现思路
1、本发明的目的在于提供一种炸礁船航道通航信号控制系统及实现方法,使得炸礁船沿着航道运行时,可对航道通航的炸礁船进行有效的通航控制,充分保障炸礁船的正常通航,提升炸礁船航道通航效率,解决了上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种炸礁船航道通航信号控制系统,包括:
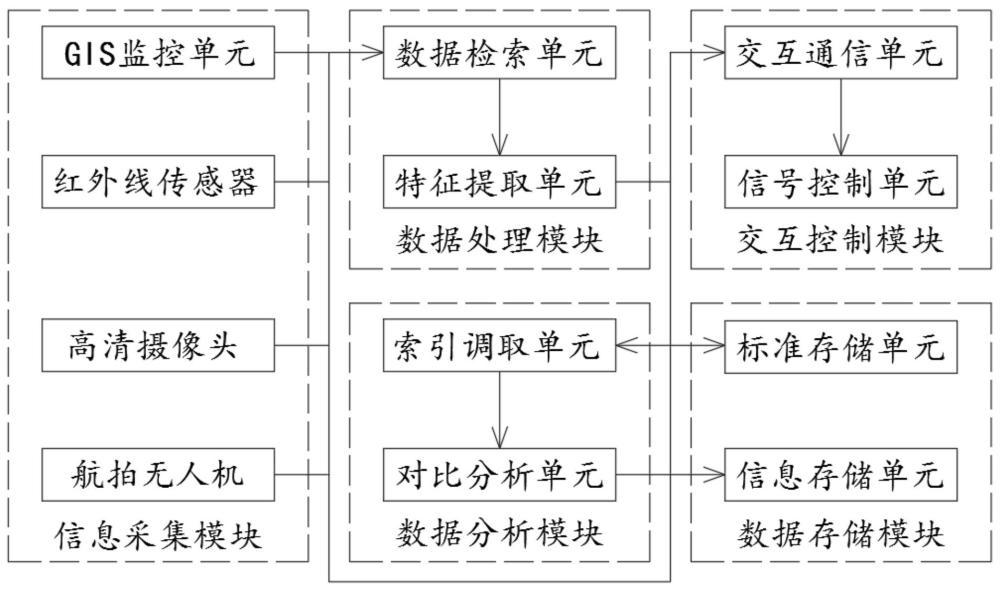
4、信息采集模块,用于实时采集炸礁船航道通航信号信息,基于传感器及高清摄像头实时获取炸礁船周围的航道及船只信息,确定出炸礁船航道通航信号信息;
5、数据处理模块,用于对炸礁船航道通航信号信息进行处理,获取实时采集的炸礁船航道通航信号信息,且对炸礁船航道通航信号信息进行检索及特征提取,确定出炸礁船航道通航信号特征数据;
6、数据分析模块,用于对炸礁船航道通航信号特征数据进行分析,获取炸礁船航道通航信号特征数据,且索引调取出炸礁船航道通航信号标准数据,基于炸礁船航道通航信号标准数据,对炸礁船航道通航信号特征数据进行分析,确定出炸礁船航道通航信号分析结果;
7、交互控制模块,用于对炸礁船进行通航信号控制,获取炸礁船航道通航信号分析结果,且与对向船只进行交互通信,确定出炸礁船航道通航信号控制方法,基于炸礁船航道通航信号控制方法对炸礁船进行通航信号控制;
8、数据存储模块,用于存储实时采集的炸礁船航道通航信号信息及炸礁船航道通航信号标准数据,为炸礁船航道通航信号控制提供参照指导基础。
9、优选的,所述信息采集模块包括:
10、gis监控单元,用于实时获取炸礁船周围航道及船只的地理信息;
11、红外线传感器,用于实时获取炸礁船周围航道及船只的位置信息;
12、高清摄像头,用于实时获取炸礁船周围航道及船只的摄像信息;
13、航拍无人机,用于实时获取炸礁船周围航道及船只的画面信息;
14、基于实时获取的炸礁船周围航道及船只的地理信息、位置信息、摄像信息及画面信息,确定出炸礁船航道通航信号信息。
15、优选的,所述航拍无人机的航拍控制系统,包括:
16、信息获取模块,用于获取炸礁船的航线、炸礁任务和炸礁船的作业时间段;
17、数量确定模块,用于根据所述炸礁船的航线、炸礁任务和炸礁船的作业时间段,设置航拍无人机的数量;
18、航拍策略获取模块,用于根据所述航拍无人机的数量、炸礁船的航线、炸礁任务和炸礁船的作业时间段的变化情况设置航拍策略。
19、优选的,所述数量确定模块包括:
20、第一信息模块,用于提取所述炸礁船的航线,并根据所述航线获取所述航线对应的路径长度,作为第一信息;
21、第二信息模块,用于提取所述炸礁船的炸礁任务,并根据所述炸礁任务获取所述炸礁任务对应的炸礁面积,作为第二信息;
22、第三信息模块,用于提取所述炸礁船的作业时间段,并根据所述炸礁船的作业时间段获取当前一次炸礁作业总时长,作为第三信息;
23、第四信息模块,用于提取所述航拍无人机的电量所能支撑的最大单次航拍时长,作为第四信息;
24、第一数量获取模块,用于利用第一信息、第二信息、第三信息和第四信息获取航拍无人机的第一数量;其中,所述航拍无人机的第一数量通过如下公式获取:
25、
26、其中,n1表示第一数量,且为向上取整;n0表示预设的基准数量,n0=2;l、s和t分别表示所述航线对应的路径长度、炸礁任务对应的炸礁面积和当前一次炸礁作业总时长;l0、s0和t0分别表示所述航线对应的路径长度对应的预设长度阈值、炸礁任务对应的炸礁面积对应的预设面积阈值和当前一次炸礁作业总时长对应的时间阈值;td表示航拍无人机的电量所能支撑的最大单次航拍时长;α1表示第一数量设置系数,α1的取值范围为0.67-0.72;e表示常数;
27、第二数量获取模块,用于利用第一信息、第二信息、第三信息和第四信息获取航拍无人机的第二数量;其中,所述航拍无人机的第二数量通过如下公式获取:
28、
29、其中,n2表示第二数量,且为向上取整;n0表示预设的基准数量,n0=2;l、s和t分别表示所述航线对应的路径长度、炸礁任务对应的炸礁面积和当前一次炸礁作业总时长;l0、s0和t0分别表示所述航线对应的路径长度对应的预设长度阈值、炸礁任务对应的炸礁面积对应的预设面积阈值和当前一次炸礁作业总时长对应的时间阈值;td表示航拍无人机的电量所能支撑的最大单次航拍时长;α1表示第一数量设置系数,α1的取值范围为0.67-0.72;e表示常数;α2表示第二数量设置系数,α2的取值范围为0.16-0.24。
30、优选的,所述航拍策略获取模块,包括:
31、变化监控模块,用于实时监测所述炸礁船的航线、炸礁任务和炸礁船的作业时间段的是否出现变化;
32、第一策略模块,用于当所述炸礁船的航线、炸礁任务和炸礁船的作业时间段没有发生变化时,则按照第一数量依次派遣航拍无人机对炸礁船进行航拍;并且,根据第一数量设定航拍无人机的单次航拍电量阈值,当航拍无人机达到所述单次航拍电量阈值时,则控制所述航拍无人机返程,并启动另一架航拍无人机接替航拍作业;其中,所述单次航拍电量阈值通过如下公式获取:
33、
34、其中,e1表示第一数量对应的单次航拍电量阈值;ez表示航拍无人机的总电量;e0表示满足航拍并成功返航的最低电量;δe表示单位时间内航拍无人机的理论最大衰减电量;
35、条件判断模块,用于当所述炸礁船的航线、炸礁任务和炸礁船的作业时间段的任一一项发生变化时,判断发生变化的条件;
36、第一变化信息判断模块,用于当发生变化的条件为航线发生变化时,则判断变化后的航线总长度是否大于变化前的航线总长度;
37、第二策略模块,用于如果变化后的航线总长度未超过变化前的航线总长度,或,变化后的航线总长度超过变化后的航线总长度且超出的航线长度未超过变化前航线长度的12%,则按照第一数量依次派遣航拍无人机对炸礁船进行航拍;
38、第三策略模块,用于如果变化后的航线总长度超过变化后的航线总长度,且,超出的航线长度大于过变化前航线长度的12%,则按照第二数量依次派遣航拍无人机对炸礁船进行航拍;并且,根据第一数量设定航拍无人机的单次航拍电量阈值,当航拍无人机达到所述单次航拍电量阈值时,则控制所述航拍无人机返程,并启动另一架航拍无人机接替航拍作业;其中,所述单次航拍电量阈值通过如下公式获取:
39、
40、其中,e2表示第二数量对应的单次航拍电量阈值;ez表示航拍无人机的总电量;e0表示满足航拍并成功返航的最低电量;δe表示单位时间内航拍无人机的理论最大衰减电量;
41、第二变化信息判断模块,用于当发生变化的条件为炸礁任务发生变化时,则判断变化后的炸礁面积是否大于变化前的炸礁面积;
42、第四策略模块,用于如果变化后的炸礁面积未超过变化前的炸礁面积,或,变化后的炸礁面积超过变化后的炸礁面积且超出的超出面积未超过变化前炸礁面积的8%,则按照第一数量依次派遣航拍无人机对炸礁船进行航拍;
43、第五策略模块,用于如果变化后的炸礁面积超过变化后的炸礁面积,且,超出面积大于过变化前炸礁面积的8%,则按照第二数量依次派遣航拍无人机对炸礁船进行航拍;
44、第三变化信息判断模块,用于当发生变化的条件为作业时间段发生变化时,则判断变化后的作业时间段是否大于变化前的作业时间段;
45、第六策略模块,用于如果变化后的作业时间段未超过变化前的作业时间段,或,变化后的作业时间段超过变化后的作业时间段且超出的时长未超过变化前作业时间段的17%,则按照第一数量依次派遣航拍无人机对炸礁船进行航拍;
46、第七策略模块,用于如果变化后的作业时间段超过变化后的作业时间段,且,超出时长大于过变化前作业时间段的17%,则按照第二数量依次派遣航拍无人机对炸礁船进行航拍。
47、优选的,所述数据处理模块包括:
48、数据检索单元,用于对实时采集的炸礁船航道通航信号信息进行检索;
49、获取实时采集的炸礁船航道通航信号信息,基于顺序检索方法,对炸礁船航道通航信号信息进行检索,过滤掉对炸礁船航道通航信号控制无用的炸礁船航道通航信号信息,确定出对炸礁船航道通航信号控制有用的炸礁船航道通航信号信息;
50、特征提取单元,用于对检索后的炸礁船航道通航信号信息进行特征提取;
51、获取对炸礁船航道通航信号控制有用的炸礁船航道通航信号信息,通过影像分析和变换对炸礁船航道通航信号信息进行提取,提取出炸礁船航道通航信号特征数据。
52、优选的,所述数据分析模块包括:
53、索引调取单元,用于索引调取炸礁船航道通航信号标准数据;
54、获取炸礁船航道通航信号特征数据,基于炸礁船航道通航信号特征数据,索引调取出炸礁船航道通航信号标准数据;
55、对比分析单元,用于对炸礁船航道通航信号特征数据进行对比分析;
56、获取炸礁船航道通航信号特征数据及炸礁船航道通航信号标准数据,基于炸礁船航道通航信号标准数据,对炸礁船航道通航信号特征数据进行分析,确定出炸礁船航道通航信号分析结果。
57、优选的,所述交互控制模块包括:
58、交互通信单元,用于与对向船只进行交互通信;
59、获取炸礁船航道通航信号分析结果,且与对向船只进行交互通信,确定出炸礁船航道通航信号控制方法;
60、信号控制单元,用于对炸礁船进行通航信号控制;
61、获取炸礁船航道通航信号控制方法,基于炸礁船航道通航信号控制方法对炸礁船进行通航信号控制。
62、优选的,所述数据存储模块包括:
63、信息存储单元,用于存储实时采集的炸礁船航道通航信号信息;
64、标准存储单元,用于存储炸礁船航道通航信号标准数据,为炸礁船航道通航信号控制提供参照指导基础。
65、根据本发明的另一个方面,提供了一种炸礁船航道通航信号控制系统的实现方法,包括如下步骤:
66、s1:通过信息采集模块实时采集炸礁船航道通航信号信息,利用数据处理模块对实时采集的炸礁船航道通航信号信息进行处理,确定出炸礁船航道通航信号特征数据;
67、s2:通过数据分析模块对炸礁船航道通航信号特征数据进行分析,基于索引调取出的炸礁船航道通航信号标准数据,对炸礁船航道通航信号特征数据进行分析,确定出炸礁船航道通航信号分析结果;
68、s3:通过交互控制模块对炸礁船进行通航信号控制,基于炸礁船航道通航信号分析结果,与对向船只进行交互通信,确定出炸礁船航道通航信号控制方法,基于炸礁船航道通航信号控制方法对炸礁船进行通航信号控制。
69、优选的,所述s2中,通过数据分析模块对炸礁船航道通航信号特征数据进行分析,执行以下操作:
70、获取炸礁船航道通航信号特征数据;
71、基于炸礁船航道通航信号特征数据,索引调取出炸礁船航道通航信号标准数据;
72、基于炸礁船航道通航信号标准数据,对炸礁船航道通航信号特征数据进行分析;
73、针对炸礁船航道通航信号特征数据在炸礁船航道通航信号标准数据范围内的情况,则炸礁船航道通航信号分析结果为炸礁船航道通航信号正常,指引炸礁船按照炸礁船航道继续通航;
74、针对炸礁船航道通航信号特征数据不在炸礁船航道通航信号标准数据范围内的情况,则炸礁船航道通航信号分析结果为炸礁船航道通航信号异常,则炸礁船与对向船只进行交互通信,确定出炸礁船航道通航信号控制方法,基于炸礁船航道通航信号控制方法对炸礁船进行通航信号控制。
75、与现有技术相比,本发明的有益效果是:
76、本发明的炸礁船航道通航信号控制系统及实现方法,实时采集炸礁船航道通航信号信息,且对炸礁船航道通航信号信息进行处理,确定出炸礁船航道通航信号特征数据,基于索引调取出的炸礁船航道通航信号标准数据,对炸礁船航道通航信号特征数据进行分析,确定出炸礁船航道通航信号分析结果,基于炸礁船航道通航信号分析结果,与对向船只进行交互通信,确定出炸礁船航道通航信号控制方法,基于炸礁船航道通航信号控制方法对炸礁船进行通航信号控制,使得炸礁船沿着航道运行时,可对航道通航的炸礁船进行有效的通航控制,充分保障炸礁船的正常通航,提升炸礁船航道通航效率。
- 还没有人留言评论。精彩留言会获得点赞!