基于双峰分布的双向航道船舶碰撞浮标风险画像方法
本发明属于船舶航道安全,具体涉及一种基于双峰分布的双向航道船舶碰撞浮标风险画像方法。
背景技术:
1、浮标是一种重要的运输设施,有助于确保船舶航行的安全和便利。它是航行环境的重要组成部分,在确保过往船只的安全和直接维护其安全以及船上船员和乘客的安全方面发挥着至关重要的作用。在航行过程中,由于潮汐、操纵等多种原因,船舶有时会与浮标灯发生碰撞,对船舶和浮标灯造成损坏。如果事故后处理措施不当或不及时,可能会发生其他次生事故。浮标与所有船只的安全息息相关。为了避免碰撞,重要的是计算船舶和浮标之间碰撞的概率。
2、近年来,船舶与浮标碰撞的风险评估得到了广泛的研究。例如,现有研究中分析了船舶与浮标碰撞的概率和机制。水道风险评估有三个主要模型:iala水道风险评估计划(iwrap)、港口和水道安全评估研讨会指南(pawsa)和正式安全评估(fsa)。iwrap模型是一种基于统计交通流数据评估船舶碰撞可能性的定量评估方法。然而,这种计算方法很复杂,过程和结果在很大程度上取决于研究人员对模型参数的配置和输入。相比之下,pawsa模型主要采用定性评估来衡量水道安全隐患,预测风险水平和结果,评估缓解措施,并为实施选定措施以降低风险建立阶段。然而,pawsa模型依赖于收集港口管理者、水道使用者和海事人员等专家的意见。此外,fsa模型基于模糊数学和层次分析法的理论方法。然而,它依赖于专家的主观评分和判断,这阻碍了它的客观性,并且它没有具体说明风险结果。
3、目前的一些研究集中在单向通道中的船舶交通流建模上。然而,这些模型有一个局限性,即它们假设船舶只在单向通道中航行,这与船舶路由系统的现实不符。随着全球航运的不断发展,双向通道变得越来越普遍,船只在双向通道中穿行。在这种情况下,船只在双向通航航道水域的分布往往呈现双峰或多模式,偏离正态分布。现有模型假设船舶只在单向通道中航行,在估计碰撞概率时可能会引入不准确度和计算误差。这些模型的不精确性可能会影响船舶和浮标之间碰撞概率的估计精度。
4、船舶路由系统包括许多类型的路由措施,如交通隔离方案、环形交叉口、沿海交通区、双向路线和推荐路线。这些路由措施可以单独使用,也可以根据具体需要组合使用。作为一种船舶交路系统,双向航道在减少船舶在港口等待时间、提高航道利用率、缓解航行压力等方面比单向航道具有显著优势。
5、双向航道是船舶交通管理系统的重要组成部分。岸基当局提供了一些法规和建议,规定了船舶在某些海域应遵循或采用的路线、航行路径或航道划分,以加强航行安全。最近,概率密度函数(pdf)已被广泛用于船舶研究,特别是在碰撞概率评估中。然而,双向航道水域中船只的几何分布往往是双峰或多峰的,而不是正态的。现有的模型仍然有一些可能的局限性,可以改进。
6、由于双向航道是指中间有隔离线的双向通道,为船舶提供安全,因此可以使用双峰分布来描述随机变量的累积分布函数的概率规律。双峰分布是指有两个峰值或模式的分布,相对较高的频率集中在分布中的两个不同值周围。这导致了具有两个不同峰值的频率分布曲线,这两个峰值代表双向通航通道中的上游和下游交通流量。
7、自动识别系统(ais)可以作为遵循双峰分布的船舶交通流数据的来源。ais已被用于描述船舶交通行为。
8、多变量优化器(mvo)通常用于准确确定双峰模型的参数。然而,它在解决大规模优化问题时的性能需要提高,并且算法缺乏跳出局部极值的能力,导致无法找到全局最优解。
技术实现思路
1、为了更准确地模拟双向航道中船舶碰撞浮标的概率,降低正态分布模型引起的估计误差,本发明首次将双峰正态分布引入双向航道的船舶交通流中,建立了船舶交通流的双峰正态分布模型。再利用自动识别系统(ais)的数据驱动方法,提出了一种基于对立学习的多变量优化器(olmvo),以最小化概率密度函数的拟合误差,并获得双峰模型中的最优参数。
2、本发明丰富了对双向航道中船舶碰撞浮标概率的细致研究。该方法可为浮标主管部门、海事部门和浮标管理部门的安全管理提供决策和建议。
3、船舶浮筒碰撞概率模型可以帮助提出减少碰撞事件可能性的方法,如拓宽航道和调整双向航道。本发明旨在帮助建立一个合理、全面、科学的助航系统,以减少船舶航行中的事故数量,减少助航设备被撞击的机会,并降低助航设备管理的相关成本。它旨在为进出港口的船只提供高质量的导航服务。
4、本发明具体采用以下技术方案:
5、一种基于双峰分布的双向航道船舶碰撞浮标风险画像方法,其特征在于:以浮标附近通过的船舶的ais数据作为双峰分布的船舶交通流数据的来源,通过基于反向学习的多宇宙优化器,将双峰正态分布与船舶交通流频率进行拟合;目标是最小化拟合误差的平方和,以确定双峰模型交通流分布的最优参数,再结合船型的宽度和浮标的宽度计算获得船舶碰撞浮标概率及给定时间范围内碰撞事故的预期次数。
6、进一步地,其具体包括以下步骤:
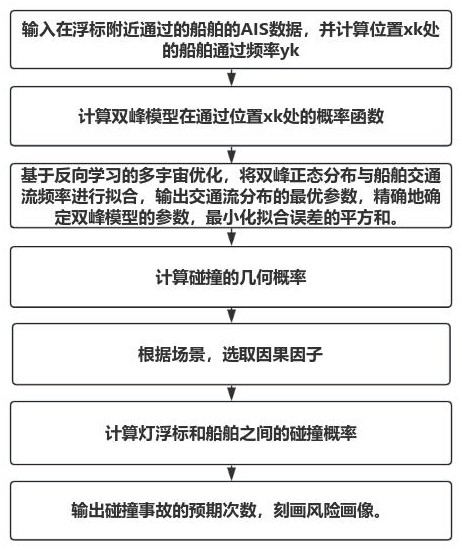
7、步骤s1:输入在浮标附近通过的船舶的ais数据,并计算位置xk处的船舶通过频率yk;
8、步骤2:计算双峰模型在通过位置xk处的概率函数,并确定优化目标:
9、将通道的中线及其垂直方向设为y轴和x轴;输入在浮标附近通过的船舶的ais数据,并计算在位置xk处的船舶通过频率yk;双峰模型的概率密度函数表示为:
10、f3(x)=af1+(1-a)f2 (1)
11、其中,a表示第一正态分布数据在整个数据集中的比例;f1和f2分别表示上游和下游船舶流的概率密度;假定f1~(μ1,σ1)和f1~(μ2,σ2);μ1和μ2受船舶交通到航道中心线的距离的影响,σ1和σ2受穿过闸门线的船舶交通流宽度的影响;f1和f1各自独立分布;
12、优化目标为确定最佳双峰参数μ1、σ1、μ2和σ2,以最小化拟合误差的平方和:
13、
14、其中,ns是位置xk的总量,q是每年的船舶交通流量,t是年份数;tq是船舶交通流的体积,对应通过门线的船舶轨迹的数量;
15、步骤s3:基于反向学习的多宇宙优化,将双峰正态分布与船舶交通流频率进行拟合,输出交通流分布的最优参数,以最小化拟合误差的平方和;
16、步骤s4:计算碰撞的几何概率;
17、
18、式中φ为标准正分布的分布函数φ;b为船宽,bb为浮标宽度;
19、步骤s5:根据场景,基于碰撞要素选取因果因子pc,如下表所示:
20、表1碰撞要素.
21、 情形 <![cdata[logf<sub>c</sub>]]> +/- <![cdata[p<sub>c</sub>]]> 对遇 -4.31 0.35 <![cdata[4.90·10<sup>-5</sup>]]> 追越 -3.96 0.36 <![cdata[1.10·10<sup>-4</sup>]]> 交叉 -3.89 0.34 <![cdata[1.29·10<sup>-4</sup>]]> 搁浅 -3.80 0.26 <![cdata[1.59·10<sup>-4</sup>]]> 物标 -3.73 0.36 <![cdata[1.86·10<sup>-4</sup>]]>
22、步骤s6:计算灯浮标和船舶之间的碰撞概率;灯浮标和船舶之间的碰撞概率由下式给出:
23、
24、步骤s7:输出碰撞事故的预期次数,刻画风险画像;预期碰撞次数n计算如下:
25、n=tqfcollision (11)
26、进一步地,基于反向学习的多宇宙优化的算法过程具体包括以下步骤:
27、步骤s31:根据变量的上下限随机初始化多元宇宙种群u;
28、步骤s32:初始化参数;
29、步骤s33:根据目标函数计算个体宇宙的适应度,通过比较得到当前的最优宇宙;
30、步骤s34:更新虫洞存在概率wep和行进距离率tdr;
31、虫洞存在概率wep表示为:
32、
33、其中,l表示当前迭代,p表示利用精度,l是最大迭代;
34、行进距离率tdr的更新为:
35、
36、步骤35:使用轮盘机制,表示为:
37、
38、其中,表示第i个宇宙的第j个参数,ui表示第i个宇宙,ni(ui)是第i个世界的归一化膨胀率;r1是[0,1]范围内的随机数,用于概率地实现轮盘选择机制;
39、步骤s36:执行基于对立的学习:首先生成随机数r5;如果它小于阈值ε,则将解替换为:
40、
41、步骤s37:更新最佳宇宙;然后使用它来代替当前的最优宇宙,除非后者保持更好,因此被保留;
42、执行过程表示为:
43、
44、其中xj表示最佳形成均匀的第j个参数,lbj表示第j个变量的下界,ubj是第j个变数的上界,r2、r3和r4是[0,1]范围内的随机数;r2用于通过虫洞概率地执行黑洞和白洞之间的物质交换,r3用于判断黑洞在最佳宇宙附近使用tdr乘法器执行负搜索策略还是正搜索策略,r4用于定义黑洞在最佳世界中进行的搜索范围的规模;
45、步骤s38:如果满足预设条件,则输出最优解;否则,从步骤s33开始重复该算法。
46、相比于现有技术,本发明及其优选方案建立了一个基于双峰分布的双向航道船舶碰撞浮标概率模型。可以在此基础上帮助开发一个合理、全面和科学的助航系统,从而减少船舶航行中的事故,减少助航设备被撞击的机会,并降低助航设备管理的相关成本,为进出港口的船只提供高质量的导航服务。
47、考虑现有的碰撞概率忽略了对特定水道内船只运行模式的考虑。目标之一是弥合这一差距。
48、(1)为了更准确地描述双向通航通道中的交通流量,建立了一个双峰正态分布模型。据我们所知,这是首次将双峰正态分布引入双向航道的船舶交通流中。
49、(2)为了使概率密度函数的拟合误差最小化,提出了一种基于对立学习的多变量优化器。
50、(3)将自动识别系统(ais)的数据驱动方法应用于船舶交通数据,以确定双向航道交通流的概率密度参数。
- 还没有人留言评论。精彩留言会获得点赞!